机载MIMO雷达空时杂波块对消器
2015-12-18王凯
王 凯
(西安测绘总站,陕西西安 710054)
机载MIMO雷达作为传统机载雷达的发展,通过利用发射波形分集激发目标的空间分集特性并分布式接收,可获得杂波抑制、参数估计,抗干扰等能力的大幅提升[1-3]。将MIMO雷达应用于空中平台,结合空时自适应处理(Space-Time Adaptive Processing,STAP)技术来检测动目标成为近几年的热点[4-7]。但由于发射波形分集的缘故,机载MIMO雷达STAP将传统的空域-时域二维处理扩展到发射-接收-时域三维空面,数据维数的急剧增加将导致运算量和杂波协方差矩阵估计所需样本过大。传统的降维技术[8-11]虽能缓解这一问题,但实际雷达系统中,杂波环境快速变化,即使是降维技术也难以获得理想的效果。
在目标检测之前提前将杂波预滤波可有效地提高动目标检测的性能,但由于机载雷达运动导致的杂波空时耦合特性,地基雷达MTI技术并不能有效地将其滤除。机载雷达的运动补偿和杂波抑制起源于20世纪60年代,虽然传统的杂波抑制技术如时间平均杂波相干机载雷达(Time Average Clutter Coherent Airborne Radar,TACCAR)和相位中心偏置天线(Displaced Phase Center Antenna,DPCA)技术发展成熟,设备简单,可以获得较稳定的主杂波对消比[12],但其只对消了主杂波波束内的杂波,对旁瓣杂波无明显抑制,且应用条件有限。针对机载MIMO雷达杂波空时耦合的特性,本文提出了一种应用于机载MIMO雷达的空时杂波块对消器(Space-Time Clutter Block Canceller,STCBC)来提高MIMO雷达的动目标检测能力,合理的利用空域和时域的耦合关系,对杂波进行抑制。且由于偏航角的引入,该方法在正侧视和非正侧视的条件下均适用。同时,用该方法作为杂波预滤波器,后续空时自适应算法的性能也能够得到一定的改善。
1 信号模型
如图1所示,发射阵列由M个发射阵元组成,阵元间距分别为dt;接收阵列由N个接收阵元组成,阵元间距为dr。在一次相干处理间隔内共有K个脉冲用作相干积累。载机以速度va飞行,飞行角度与x轴夹角为θp,发射阵列同时发射M个码长为p的不相关信号S,则发射信号协方差矩阵为

其中,(·)H表示矩阵或向量单位阵的复共轭转置。
沿方位角将第l个距离环均匀分为Nc个杂波单元,并且第l个距离环上的第i(i=1,…,Nc)个杂波单元对应的方位角和俯仰角分别记为θi和φl,则相应的发射阵列导向矢量和接收阵列导向矢量分别为

其中,fsi=drcosθicosφl/λ 为归一化空域频率;λ 为雷达工作波长;α=dt/dr,(·)T表示向量转置。

图1 机载MIMO雷达系统
杂波回波是一个距离单元内所有散射单元的回波信号之和,则在发射第k(k=1,…,K)个脉冲时第l个距离环上的杂波数据可表示为

其中,βi为第i个杂波单元的散射系数,且服从均值为0、方差为 σ2的复高斯分布。fdi=2vacos(θi+θp)cosφl/λfr为归一化多普勒频率,而 fr为脉冲重复频率。
杂波单元反射的信号经匹配滤波处理,并将匹配滤波后的杂波数据堆栈成列向量,有

将K个发射脉冲内的杂波数据排成一列矢量

其中

为K×1维多普勒导向矢量。yc(l)中第kmn个采样数据可表示为

其中,stk(fdi)表示多普勒导向矢量st(fd,i)的第k个元素;θi,φl)和 arn(θi,φl)分别表示)at(θi,φl)和ar(θi,φl)的第 m 和第 n 个元素。
2 空时杂波块对消器原理
为讨论方便,对杂波回波做以下常用假设[10]:(1)各散射单元回波是统计独立的。(2)在每个相干处理时间内,杂波起伏非常缓慢。假设在偏航角为零的DPCA工作条件下,对于第 yk,m,(n+1)个杂波采样信号和第y(k+1),m,n个杂波采样信号
结合式(2)和式(7)比较式(9)和式(10)可知,这两路采样信号相等,可直接对消掉。将这种雷达工作于DPCA条件下的特殊规律推广到非正侧视雷达运动平台,即偏航角θp≠0°,并从两个采样信号推广到所有K×M×N个采样信号,便可得到工作于一般情况的空时杂波块对消器。将杂波采样向量 y(2∶K),m,(1∶N-1)(l)排列为矩阵后可表示为
同样,将杂波采样向量 y(1∶K-1),m,(2∶N)(l)排列为矩阵后可表示为
文中通过设计一个滤波器系数矩阵来使残余向量的F-范数最小,即
其中,[·]-1表示对矩阵求逆。
为了减小实时处理的计算量,在得到雷达参数后,系数矩阵D可在数据处理之前算出并储存,使用时直接利用查表获得。且由于邻近距离单元的杂波轨迹是缓慢变化的,因此可对邻近的若干距离单元使用同一个滤波器系数矩阵D来抑制杂波,这可降低实时处理中需要的储存量。
3 杂波预滤波方法
杂波抑制方法可作为杂波预滤波器使用,后续处理可级联降维空时自适应处理方法。将系统在一个CPI内接收的数据重新排成如下一个列向量

其中,st为目标发射导向矢量;sd为目标信号的多普勒导向矢量;sr为目标接收导向矢量。杂波预滤波器可写成一个预滤波矩阵的形式,定义杂波预滤波矩阵Q∈CMKN×M(K-1)(N-1)为
需要注意的是,经过预滤波后的信号由原来的MKN维变为M(K-1)(N-1)维,即经过预滤波后的数据在脉冲维和空域接收维上各减少了一维。假设降维矩阵为T。对预滤波后数据和导向矢量进行降维处理,得

得到预滤波后因子法的权矢量为

4 仿真实验
文中进行以下仿真实验来验证算法性能。实验中假设发射天线数M=8,接收阵元数N=8。一个相干处理间隔内的脉冲数K=8,每个脉冲内的发射波形为长度L=128的4项码。飞行高速ha=9 km,阵元行间距dR=0.1 m,dT=1 m,λ=0.2 m。脉冲重复频率fr=2 000 Hz,载机飞行速度va=100 m/s。沿着方位角将一个距离单元从0°~180°等间隔的划分为300个杂波散射单元。杂噪比CNR=60 dB。动目标的归一化多普勒频率为2fdr/fr=0.2,信噪比为SNR=10 dB。而由于地面风吹草动等因素,造成杂波内部运动,从而造成杂波谱一定程度的展宽,这里假设杂波相对带宽Br=0.02。文中仿真了偏航角φp=0°和偏航角φp=30°情况下杂波对消前后功率。
图2为正侧视机载MIMO雷达运动平台情况下使用空时杂波块对消器抑制杂波前后的空时二维杂波功率的变化。从图2(a)中可看出,在方位角-多普勒平面上,正侧视情况下的空时二维杂波功率沿斜率为1的迹线分布,主杂波区功率高出非杂波区约60 dB。图2(b)表明经空时杂波块对消后,杂波区的能量明显下降,而动目标经过滤波后能量保持不变,仍为10 dB,且明显高于附近杂波能量。这表明空时杂波块对消器能够有效的沿杂波迹形成凹口来对杂波进行滤除,为后续动目标信号的相干积累和检测提供了方便。
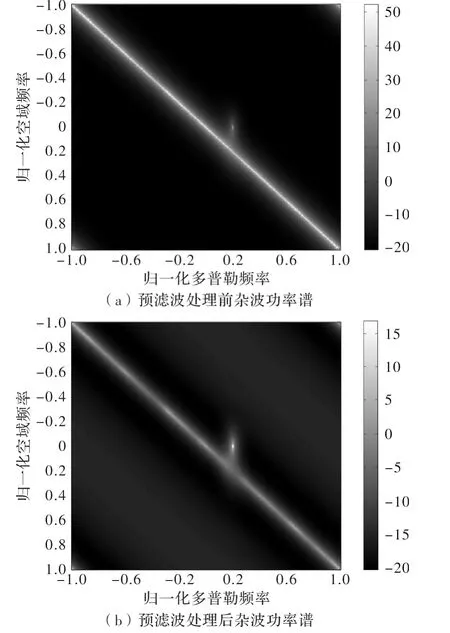
图2 预滤波处理前后杂波功率谱的空时二维分布(φp=0°)
图3(a)给出了非正侧视情况下的空时二维杂波功率分布,从图3(a)中可看出,在方位角-多普勒平面上,这种情况下的空时二维杂波功率呈半椭圆分布,主杂波区功率高出非杂波区约60 dB。图3(b)表明在该种情况下,空时杂波块对消器也能沿着相应的杂波迹形成凹口来对消杂波,而动目标信号经过滤波后能量依然保持不变,仍为10 dB,明显高出滤波后的附近杂波能量。

图3 预滤波处理前后杂波功率谱的空时二维分布(φp=30°)
图4比较了因子法(Factored Approach,FA)和扩展因子法(Extend Factored Approach,EFA)[8]以及预滤波后级联因子法和扩展因子法的改善因子曲线。STCBC+FA和STCBC+EFA分别表示空时杂波块对消器预滤波后级联因子法和扩展因子法。从图4中可看出,经杂波预滤波后,两种算法性能均不同程度的好于预滤波之前。在图4(a)中,归一化多普勒频率fd=0.1的主杂波区,FA和EFA在级联杂波预滤波器后分别约有30 dB和3 dB的改善。而在fd=0.3的旁瓣杂波区,其在级联杂波预滤波器后分别约有10 dB和1.5 dB的改善。而在φp=0.3的非正侧视下,预滤波之后的FA和EFA算法的改善因子较原方法也有一定的提升。在这两种方法中,FA性能的提高尤为明显,而EFA的提高并不明显,这是因为在均匀样本充足的情况下,EFA已基本接近最优。此外可看出,这两种方法在主杂波区的改善将有利于低速目标的检测。
5 结束语
本文提出了一种能有效抑制杂波的空时杂波块对消器,该方法利用机载MIMO雷达的几何配置信息及雷达工作参数设计滤波器系数矩阵以滤除杂波,具有无收敛过程应用范围广等优点。通过理论分析和实验仿真证明,文中所提算法能较好地抑制杂波,减轻了后续降维自适应处理的负担,为提高动目标检测性能奠定了基础。
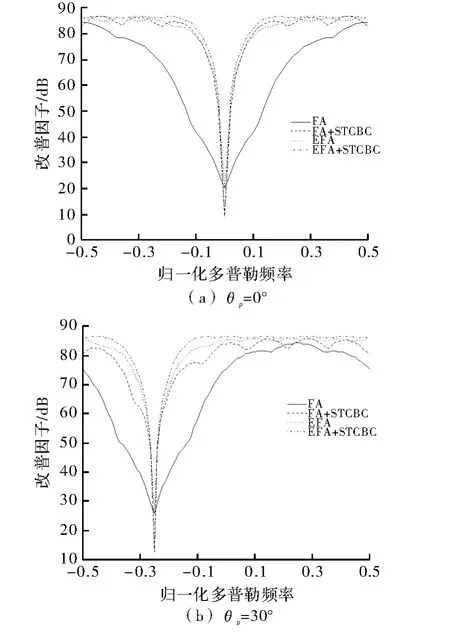
图4 改善因子比较
[1] Bliss D W,Forsythe K W.Multiple-input multiple-output(MIMO)radar and imaging:degrees of freedom and resolution[C].Monterey,USA:Proceedings of the 37th IEEE a Silomar Conference on Signals,System and Computers,2003:54-59.
[2] 杨旭,裴云庆,王兆安.开关电源技术[M].北京:机械工业出版社,2005.
[3] 王鸿麟,景占荣.通信基础电源[M].西安:西安电子科技大学出版社,2001.
[4] Yu Tao,Sung Junpa.A novel ripple- reduced DC - DC converter[J].Journal of Power Electronics,2009,9(3):396-402.
[5] 陆治国,胡红琼.一种新型的电流型功率因数校正控制方法[J].电气应用,2007,26(11):40 -44.
[6] 何茂军,李晓帆,付应红.PFC高频整流器控制原理与控制策略的研究[J].电力电子技术,2000(5):15-17.
[2] Chen Chunyang,Vaidyanathan P P.MIMO radar space time adaptive processing using prolate spheroidal wave functions[J].IEEE Transactions on Signal Processing,2008,56(2):623-635.
[3] Wang G,Lu Y.Clutter rank of STAP in MIMO radar with waveform divercity[J].IEEE Transactions on Signal Processing,2010,58(2):938 -943.
[4] Wu Y,Tang J,Peng Y N.Models and performance evaluation for multiple-input multiple-output space-time adaptive processing radar[J].IER Radar,Sonar & Navigation,2009,3(6):569-582.
[5] 曲毅,廖桂生,朱圣棋,等.MIMO雷达的目标运动方向及速度估计[J].西安电子科技大学学报:自然科学版,2008,35(5):781 -784.
[6] 吕晖,冯大政,和洁,等.机载多输入多输出雷达局域化降维杂波抑制方法[J].西安电子科技大学学报:自然科学版,2011,38(2):88 -92.
[7] 杨涛,苏涛,张旺.二维宽带 MIMO雷达发射方向图综合方法[J].西安电子科技大学学报:自然科学版,2013,40(3):180-187.
[8] 保铮,廖桂生,吴仁彪,等.相控阵机载雷达杂波抑制的时空维自适应滤波[J].电子学报,1993,21(9):1 -7.
[9] Wang H,Cai L.On adaptive spatial- temporal processing for airborne surveillance radar systems[J].IEEE Transactions on Aerospace Electronics Systems,1994,30(3):660 -669.
[10] Klemm R.Space- time adaptive processing—principles and applications[M].London:The Institute of Electrical Engineers,1998.
[11] Brown R D,Schneible R A,Wicks M C,et al.STAP for clutter suppression with sum and difference beams[J].IEEE Transactions on Aerospace Electronics Systems,2000,36(2):634-646.
[12] Skolnic M I.Radar handbook[M].Second Edition.New York:McGraw - Hill,1990.