基于模糊控制的二自由度门式起重机防摆研究
2015-12-13郑飞杰吴龙晋芳伟郑亚青邱丽梅王春荣
郑飞杰,吴龙,晋芳伟,郑亚青,邱丽梅,王春荣
(1.三明学院机电工程学院,福建三明365004;2.机械现代设计制造技术福建省高校工程研究中心,福建三明365000;3.华侨大学机电及自动化学院,福建厦门361021)
基于模糊控制的二自由度门式起重机防摆研究
郑飞杰1,2,吴龙1,2,晋芳伟1,2,郑亚青3,邱丽梅1,2,王春荣1,2
(1.三明学院机电工程学院,福建三明365004;2.机械现代设计制造技术福建省高校工程研究中心,福建三明365000;3.华侨大学机电及自动化学院,福建厦门361021)
二自由度门式起重机在运输过程中,吊载摆动控制是相当重要的。为了更好的克服二自由度门式起重机吊载运行的非线性和时滞性,本文在建立系统模型的基础上,提出了模糊控制策略,设计了吊载防摆的模糊控制器,然后在MATLAB中作防摆控制仿真分析。结果显示,模糊控制器实现小车定位、吊载摆动可控,且超调较小,稳态精度和响应速度理想。
二自由度;防摆;模糊控制;MATLAB
门式起重机作为现代化运输机械中的一种,在工业化快速发展的21世纪,被广泛地运用到港口吊运、水电站、车间设备运输、火车车厢装配等方面[1],其重要性越来越突出,而相关技术问题也越来越明显。门式起重机在吊运时启动、停止,或存在外界干扰(风力等)时,会引起钢绳及吊载的摆动[2,13]。当摆动超出一定角度,会影响到起重机大小车的定位精度,制约运行效率,甚至会造成安全事故发生。在传统控制方面,吊载摆动的问题一般都是要停止吊车,操作者手动来消除摆动,这样不但延长工作时间,而且降低工作效率。近年来,教育界和工业界在门式起重机定位防摆控制研究方面所采用的方法有最优控制、经典控制、实验增量调节等[3-4],然而起重机系统的非线性是很难计算出精确的数学模型来满足这些控制算法的要求的。
门式起重机系统是一个复杂的、具有强耦合特点的非线性系统,对此,本文运用模糊控制理论,设计了一种基于模糊控制的起重机智能防摆控制器。在具有复杂性和不确定的系统控制方面,模糊控制能控制实际值逼近目标值,通过利用类人的决策方式,而不需要计算出系统的数学模型[5]。同时依赖其模糊信息处理的功能,对门式起重机防摆进行控制,实现定位防摆目的,改善系统的性能[6,9]。
1 二自由度门式起重机防摆控制系统模型
本文针对二自由度门式起重机防摆控制方面的研究,为了研究门式起重机吊载摆动的影响因素,需要建立二自由度门式起重机吊运系统模型,如图1所示。吊载防摆主要是要求控制吊载与小车中心竖直线h的偏离角度,目的是要控制摆角η(如图1中q2与h的夹角)在要求范围内;另一种情况是当η摆出要求范围时,要在最短时间内促使摆动幅度衰减至要求范围内,甚至是0,以实现起重机的防摆控制[6]。
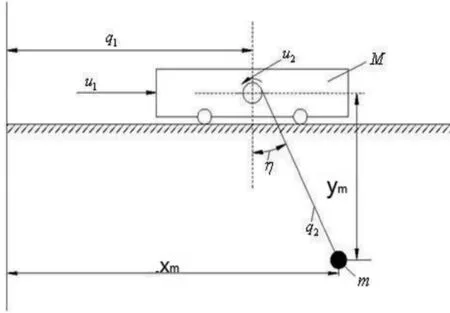
图1二自由度门式起重机吊运系统模型
如图1所示,以力u1方向为X轴正向,垂直地面为Y轴建立坐标系,二自由度门式起重机吊运系统模型中有:吊载(坐标xm,ym,质量m),绞盘(半径r),钢丝绳长q2、小车(质量M),小车驱动力u1,钢丝绳起升力u2,小车与轨道之间的摩擦力f。其中,最大起升高度q2max=h,选取q2和η为本系统的广义坐标,建立具有2个广义坐标下的起重机吊运系统模型[6]。根据实际经验可知,起重机运输过程中,吊载摆动幅度小于10°,则令cosη=1,sinη=0。利用Lagrange方程进行建模,得到起重机吊载系统数学模型为:

2 模糊防摆控制器设计及仿真
2.1系统仿真模型的建立
为了实现对控制系统进行仿真分析,要对系统模型做相应的处理,以符合计算机仿真的要求。MATLAB是控制系统运动仿真中使用最多的一款软件工具,它内含有许多实用的工具箱,如“Fuzzy Logic Toolbox”、“Simulink”等[7]。Simulink可处理线性和非线性系统,支持离散、连续以及两者混合的系统的仿真,具有很强很实用的建模仿真环境。其建模方式较简易和直观,且具有方便、灵活、可视性强等优点。针对在Simulink环境下仿真的要求,为保证仿真顺利运行,必须整理二自由度门式起重机系统的数学方程组,其中要注意的事项有[6,8]:
(1)任何变量的最高次微分项在方程组中出现的次数不能超过1;
(2)最高次微分项不能同时出现在方程式的两边,且系数值只能是1。
则起重机吊运系统的数学模型按照上述原则整理后如公式(2):

其中M为可调参数,可以任意调整,u1,u2,m为3个输入变量。当u1,u2给各自一个初始的阶跃,同时设定一个合适的m值,通过在MATLAB环境中进行仿真,得到其小车位移曲线和吊载摆角曲线如图2所示。

图2二自由度门式起重机防摆系统仿真结果
从图2仿真结果可知,单纯的二自由度门式起重机防摆系统本身是一个开环式系统,在有激励输入的情况下,将出现振荡而无法达到理想状态:小车位置是持续爬升而偏离现实,无法稳定;吊载摆动持续振荡而无法快速消除,属于无法自身控制。因此,就实际生产需求,必须控制小车实现平稳运行,抑制摆动角度快速回到要求范围内。
2.2系统模糊防摆控制器的设计与仿真
模糊控制器主要由模糊推理、模糊化、模糊规则、解模糊化和输入输出量化等部分,本文设计模糊防摆控制器是根据如图3所示的基本原理[9]。

图3基本模糊控制器原理框图
二自由度门式起重机吊运系统是非线性的,只能选择非线性控制器对其进行控制,而模糊控制器就是一种在模糊推理基础上建立的非线性控制器[10,12]。
本文模糊控制器的输入输出变量均采用7个模糊子集[11],包括:“NB”(负大)、“NM”(负中)、“NS”(负小)、“ZO”(零)、“PS”(正小)、“PM”(正中)和“PB”(正大)。二自由度门式起重机防摆系统采用两个模糊控制器来对应控制,其中位置模糊控制器的输入量是小车位移q1和小车速度q.1,而角度模糊器的输入量为吊载摆角η和摆角速度η.。对于控制规则,选择摆角模糊控制规则来代表说明,如表1所示[6]。
二自由度门式起重机防摆系统中小车位置控制和吊载摆动控制二者并不是独立的,而是相互作用的:在控制小车准确停在预定位置的同时,要保证摆角能快速抑制在要求范围。故在软件MATLAB/Simulink环境中建立防摆模糊控制器的仿真框图,进行仿真得到其阶跃响应曲线如图4所示。

表1摆角模糊控制规则表

图4加模糊控制的防摆系统仿真结果
由图4和图2对比可知,采用模糊防摆控制,小车位置在10s左右基本到达指定目标,实现可控;吊载摆角虽然不能完全消除,但抑制在可控范围内。如此,明显改善控制系统性能,提高工作效率,保证了生产环境的基本安全要求。
3 结束语
本文以二自由度门式起重机吊载系统数学模型为基础,针对实际需求提出了防摆模糊控制策略,设计了系统防摆模糊控制器,并就本身系统和添加模糊控制器的系统在Simulink中建立模型框图进行仿真,结果对比显示防摆模糊控制使系统控制更具实际意义。该方法为二自由度门式起重机防摆控制系统的稳定性、鲁棒性和控制精度提高的实现起到了一定的实际指导作用。
[1]陈志梅,孟文俊.智能起重机系统研究与展望[J].工程机械,2011,42(1):39-35.
[2]胡艳丽,杨国诗,季学斌,等.模糊自适应PID控制在桥式起重机只能防摆中的应用[J].重庆工商大学学报,2015,32(6):60-64.
[3]ABDEL-RAHMAN E M,NAYEH A H,MASOUD Z N.Dynam ics and control of cranes:a review[J].Journal of Vibration and Control,2003(9):863-908.
[4]王玥媛.基于模糊控制的桥式起重机防摆研究[D].大连:大连理工大学,2008.
[5]董湘君,曾莹,陈文.模糊PID控制器的仿真研究[J].福建电脑,2010(5):98.
[6]郑飞杰.基于模糊PID的2自由度门式起重机器人轨迹跟踪控制研究[D].厦门:华侨大学,2013.
[7]董辰辉,彭雪峰.MATLAB 2008全程指南[M].北京:电子工业出版社,2009.
[8]胡艳丽.基于模糊PID的桥式起重机防摆控制研究[D].焦作:河南理工大学,2010.
[9]胡艳丽,刘团结,季学斌,等.基于模糊的的桥式起重机智能防摆控制研究[J].数控技术数与应用,2014(7):22-24.
[10]李庆.双闭环直流调速系统的自适应模糊PID控制[J].学术·论文,2009(6):61-64.
[11]蒋理,陈树广.基于模糊控制的桥式起重机定位防摆研究[J].计算机仿真,2009,26(6):179-182.
[12]任雯,饶连周.模糊棉衣PID控制器设计及温度控制仿真[J].三明学院学报,2008,25(4):395-397.
[13]王克奇.桥式起重机的定位和防摆控制研究[J].系统仿真学报,2007,19(8):1799-1802.
(责任编辑:朱联九)
Investigation of Anti-sway Control of Two-Degree-of-Freedom Gantry Crane Based on Fuzzy Control
ZHENG Fei-jie1,2,WU Long1,2,JIN Fang-wei1,2,ZHENG Ya-qing3,QIU Li-mei1,2,WANG Chun-rong1,2
(1.College of Mechanical&Electronic Engineering,Sanming University,Sanming 365004,China; 2.Fujian College Engineering Research Center of Modern Design and Manufacturing Technology,Sanming 365000,China; 3.College of Mechanical Engineering and Automation,Huaqiao University,Xiamen,361021,China)
In the process of transportation,the anti-sway control of the two DOF gantry crane is very im portant.In order to better overcome the nonlinear and time delay of the two DOF gantry crane system,based on the system model established,the fuzzy control strategy was proposed,the anti-sw ing fuzzy controller was designed in this paper,and a study on the simulation about the anti-sway control in MATLAB/Simulink environment.Through analyzing the simulation result,the fuzzy controller can realize the positioning of the car,the sw ing of the load is controlled,and the overshoot is small,the steady state precision and the response speed are ideal.
two-degree-of-freedom;anti-sway;fuzzy control;MATLAB
TH 213.5
A
1673-4343(2015)06-0056-04
10.14098/j.cn35-1288/z.2015.06.012
2015-07-14
福建省教育厅科技项目(JB14094);三明学院科研基金自然科学研究项目(B201309/Q);福建省教育厅“卓越计划”试点项目(SD1109)
郑飞杰,男,福建漳州人,助教。主要研究方向:机器人技术。
