微机励磁装置在南水北调大型泵站中的应用
2015-12-12赵孟博杨晓久张振河
赵孟博 杨晓久 张振河
(1.江苏省南水北调刘山站工程管理项目部,江苏徐州 221000;2.徐州市大庙翻水站管理所,江苏 徐州 221000)
0 引言
邳州站工程是南水北调东线工程的第6 级泵站,工程等别为Ⅰ等,泵站规模为大(I)型,设计规模为100 m3/s,安装4 台套(含备用机1 台)竖井式贯流泵,单机设计流量33.3 m3/s,配套1950 kW 卧式同步电动机,额定电压10 kV,总装机容量7800 kW。
励磁装置是同步电动机正常工作必不可少的一个重要设备,励磁装置性能的优劣将直接关系到泵站机组的正常工作和安全运行。笔者以WKLF—102 型微机全控励磁装置在邳州站中的应用为例,从装置的组成、工作原理、性能优势以及在日常运行管理中应注意的问题等方面,对微机励磁装置在南水北调大型泵站中的应用进行了深入论述,可对大型泵站微机励磁装置的日常管理、更新改造工作有所帮助。
1 励磁装置概述
同步发电机的励磁方式分为两大类:一类是用直流发电机作为励磁电源的直流励磁系统;另一类是用硅整流装置将交流转化成直流后供给励磁的整流器励磁系统。纵观励磁装置应用发展的历史,可将其概括为3个阶段:①20 世纪70年代的KGLF型励磁装置;②20 世纪80年代末至90年代的BKL 型励磁装置;③20 世纪90年代末至现在的微机型励磁装置[1]。针对KGLF 型和BKL 型励磁系统,分别采用了全控桥和半控桥整流方式,代表了励磁系统发展的两个不同历程,在当时堪称先进技术。随着科技的进步,泵站自动化水平不断提高,励磁装置也进入了微机阶段。新一代微机励磁装置主要以微处理器(CPU)作为核心控制部件,其应用打破了原励磁设备的基本机理,与前两种励磁系统相比,具有结构更加模块化和集成化、控制和调节更加智能化、技术可靠性更高、保护功能更加完备、操作与维护更加方便以及与上位机通讯更加容易实现等优点,克服了元件受温漂影响较大、启动脉振、外网电压或负载突然波动引起带励失步跳闸等缺点,因此至目前为止,在大型泵站及其他同步电机上都有着十分广泛的应用。
2 微机励磁装置组成
WKLF—102 型微机励磁装置主要由装置硬件及配套专用软件组成,其中,硬件部分包括:三相全控桥式整流主回路、起动回路、空气开关、励磁变压器、测量指示元件、液晶触摸屏、风机单元、电源系统、接点量开入及开出部分、励磁电流、电压4~20 mA 变送输出、PI 励磁调节器、读写控制器、后台上位机通讯接口、就地计算机或MODEM 通讯接口切换板、主机CPU 板、通道板、脉冲放大板以及用于测量指示的信号变送器等;配套专用软件主要是测量运算类软件、控制类软件和保护类软件。装置的组成见图1。
3 微机励磁装置工作原理
WKLF—I1D22 型微机励磁装置是以硬件资源作为支撑,为实现不同功能而调用相应的软件程序来工作的。主机CPU 板是整个励磁装置的控制核心,除可实现测量、保护、控制与调节功能外,它同时还负责与后台上位机及读写控制器之间的通讯。无论采用何种类型的励磁装置,无论励磁装置有多么先进,它必须依据同步电动机的有关特性对电机进行控制与调节,因此,在介绍微机励磁装置工作原理前,有必要对同步电动机的特性作介绍。
3.1 同步电动机的特性
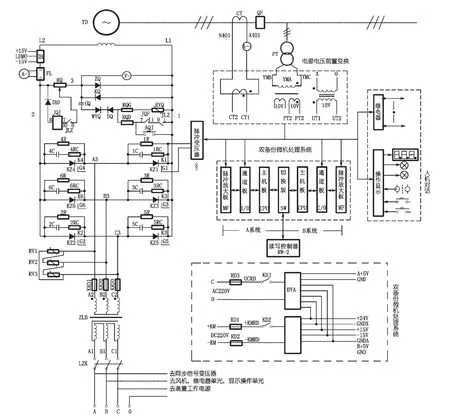
图1 微机励磁装置组成示意图
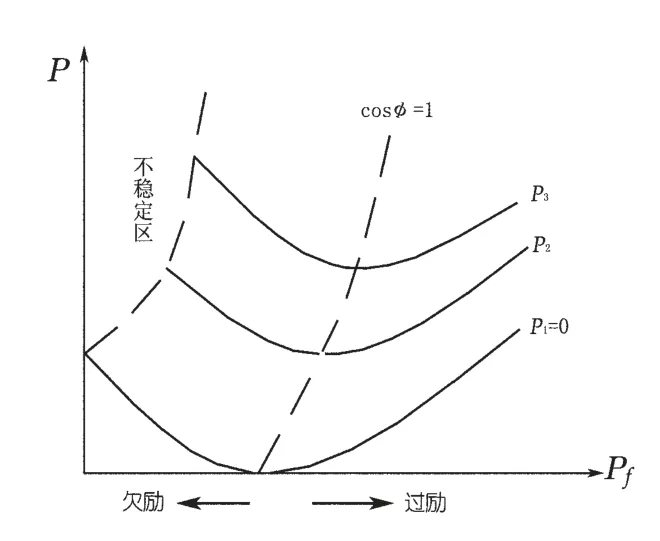
图2 同步电动机V 形曲线
同步电动机在运行时需从电网吸收有功,吸收有功功率的大小取决于所带负载及电机本身的有功损耗。同步电动机的无功决定于励磁装置输出励磁电流,同步电动机V 形曲线详见图2。当过励(超前)运行时,同步电动机向电网发电感性无功(从电网吸收电容性无功);欠励(滞后)运行时,从电网吸收电感性无功;理论上,在正常励磁运行时,既不发无功,又不吸收无功,对应功率因数cosφ=l。假设负载功率为P2,cosφ=l,当负载由P2突变为P3时,此时若不能及时进行手动或自动增磁,电机将运行在欠励(滞后)状态,同时,定子电流增加,电机从电网吸收电感性无功,这是供电部门所禁止的,若负载变化幅度过大,电机将失去同步。在泵站实际运行时,通常功率因数值为0.9,使同步电动机工作在超前状态,这样既可以就地补偿异步电机所需电感性无功,又可向电网发送电感性无功,以改善电网的供电质量,这就是同步电机的无功调节特性。
同步电动机的另一个特性就是功角特性。同步电动机正常运行时,从电网吸收的电磁功率Pem与负载功率Pf维持动态平衡,电网电压及负载在正常范围内波动时,同步电动机都不会失步,这由其功角特性决定(如图3 所示),电磁功率由式(1)确定。

式中:
E—励磁电势;
U—母线电压;
Xd∑—总电抗;
δ—功角。
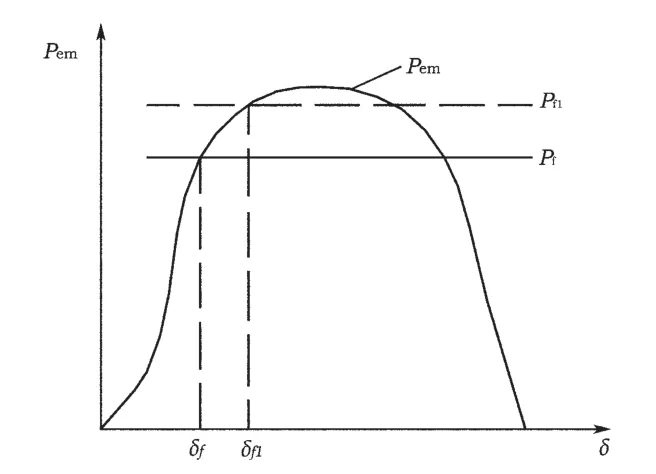
图3 同步电动机功角特性
负载突增而电压不变时,由图3的功角特性曲线及式(1)可知,负载功率Pf往上移,如无闭环调节,电磁功率曲线Pem不变,运行功角δ 增大,δ≥90°时,电机将失去同步;有闭环调节时,曲线Pem同时上移,运行功角δ 保持相对恒定,电机稳定性增加。电压突降而负载不变时,如无闭环调节,因励磁装置380 V 励磁电源(取自电机同段母线)同时下降,励磁电势E 近似与电压成正比下降,故电磁功率曲线Pem近似与机端电压Ud平方成正比下降,运行功角δ 增大,电机稳定裕度大大减小;如采用闭环调节,Ud下降的同时,励磁电势E 加大,Pem基本不变,电机稳定性增加。
3.2 励磁工作原理
根据同步电动机的运行特点,可将其工作过程分为异步启动、同步牵入、运行中及停运4 个基本阶段。与之相对应,也可将微机励磁装置的工作过程分为滑差捕捉、投励、控制与调节及灭磁4 个基本环节。现就各个环节的工作原理分别进行介绍。
3.2.1 滑差捕捉
当励磁系统检测到主机高压断路器QF 合闸时,同步电机即进入了异步启动状态,由于定转子的相对运动,在转子回路中会感应出交变电流。当转子感应电流If 为正半波时,电流流通路径为:L2—IB—FL—RQ—ZQ—L1—L2;当If 为负半波时,在转子两端感应电动势的作用下,启动可控硅KQ 触发导通,电流流通路径为:L1—KQ—RQ—FL—IB—L2—L1。这样,在电机启动过程中,转子感应电流可以无阻碍地流过启动(灭磁)电阻及安装于主桥输出母线上的霍尔电流传感器IB 等。IB 再将转子感应电流进行放大变换,来实现捕捉滑差的目的,为励磁装置的实时准角投励做好充分准备。具体流程如图l 所示。
3.2.2 投励
随着电机启动过程的推进,定转子间的滑差(转差)率在逐渐减小,当转速达到亚同步转速(95%的同步转速)、滑差率为5%时,此时并不能立即投励,否则会对电机造成较大的冲击,需等待至正半波末尾过零点时,此刻投入励磁对电机冲击最小,且启动过程平稳、快速、基本无脉振,这就是通常所说的反极性末尾准角投励。在滑差投励的同时,也启动了零压计时投励,投入正常励磁后,由JQJ 继电器保证启动回路自动关断。
励磁主机根据感应电流的变化来准确捕捉5%的滑差率进行准角投励的原理是:同步电机启动瞬间转差率很大,反映在感应电流的波形上就是频率大,接近电源频率50 Hz;反之,在同步电机接近同步转速时,转差率很小,电流波形频率亦极小。霍尔电流传感器IB 不断地将采集到的转子感应电流传输到A、B 套通道板上,再经变换放大处理后送到主机板上,主机实时检测正弦电流半波周期△tHC,直至△tHC=0.2 s 为止,此时转差率即为5%,电流半波周期与转差率的关系由式(2)求得。

式中:
△tHC—电流半波周期;
S—转差率;
F—频率50 Hz。
当S=5%时,△tHC=1/(2×0.05×50)=0.2 s。
至于在零压计时投励,其作为滑差投励的后备投励环节,是通过检测转子感应电流的正半波来实现的。当设定投励时间为2 s 时,对应的S=0.5%,其原理及计算方法与滑差投励相同。由于零压计时投励的定值比滑差投励大,绝大多数情况下,滑差投励都能准确动作,只有某些特定机组由于机组惯量小,转速低,且电机凸极效应较强,启动过程非常快,存在滑差投励环捕捉不到而电机却已直接进入同步的可能性,这种情况只能靠零压计时投励动作。
3.2.3 控制与调节
为了提高同步电机及机组的动态稳定性,减小电机由于电网或负载的波动而导致电机失步的几率,确保泵站运行的连续性与稳定性,在WKLF—I1D22 型微机励磁装置中,应用了转子励磁电流负反馈和定子功率因数负反馈相结合的双闭环调节系统[2](见图4)。
(1)供给励磁系统的低压380 V电源发生波动时,励磁调节器内环(见图4)能迅速作出反应,自动调整可控硅触发导前角α,使励磁电流基本保持恒定,供给励磁电源电压在-20%~+15%波动时,励磁电流波动不超过±0.5%。
(2)在励磁绕组直流电阻随温度变化时(温度升高阻值变大),励磁调节器内环将自动改变可控硅触发导前角,维持励磁电流恒定,当励磁绕组电阻波动±10%时,励磁电流波动不超过±0.5%。
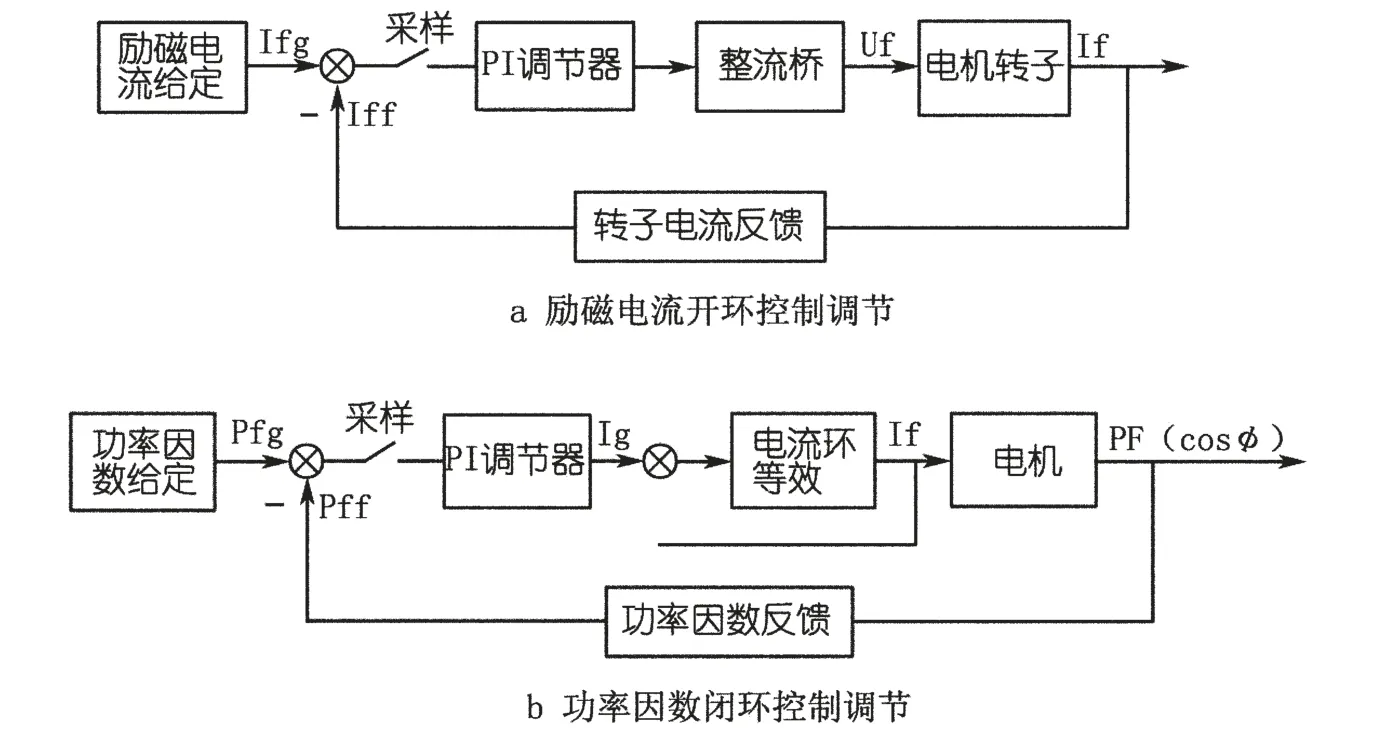
图4 励磁控制调节框
(3)在双闭环方式工作条件下,外环的输出值是内环的给定值,当外环要求改变励磁电流时,内环调节器迅速反应,以使励磁电流实际值与目标值尽可能快地趋于一致。
(4)同步电机定子供电电源和负载发生波动时,励磁调节器的外环(功率因数环)迅速作出反应,自动加大或减小励磁电流给定值,在一定的范围内(电机不长时超额运行)维持电磁功率Pem与负载功率Pf动态平衡,具体见图3、图4 及式(1)。
在装置的主机箱面板上,设有开/闭环控制钮。当旋钮置于开环位置时,外环退出运行,励磁调节器为恒励磁电流调节;当旋钮置于闭环位置时,功率因数环和电流环同时投入,只是在某些故障状态时,如:PT、CT回路故障,励磁电流超过额定值1.05倍且持续一定时间,励磁电流低于额定值5%且持续一定时间等,功率因数闭环将自动退出运行。
3.2.4 灭磁
同步电动机通常工作在过励状态,其转子绕组是一种大电感负载,当接到上级停机指令、励磁装置本身故障、微机保护动作与跳闸等情况而要求断路器分闸时,在断路器分闸的瞬间,尽管励磁电压消失,励磁电流仍会继续维持一段时间,电机机端电压高于电网电压,如不迅速可靠地进行灭磁,轻则造成电机转子、定子绝缘损坏,影响电机使用寿命,重则会诱发电机起火烧坏事故。因此,采取快速有效的灭磁方式,对泵站的安全运行至关重要。在WKLF-I1D22 型微机励磁装置中,无论是手动灭磁、正常停机灭磁,还是保护(如失步)动作灭磁,都会启动灭磁子程序。进入灭磁子程序后,强行设置α=150°,主桥进入逆变状态,转子储能经励磁变压器回馈至电网,转子电流逐渐减小,当电流小到一定值时,主桥可控硅完全关断,此时停发触发脉冲即灭磁结束。
4 微机励磁装置的性能优势
4.1 技术可靠性高
双套微机励磁调节器和双套工作电源互为热备用。在主机出现电源故障、软件故障和硬件故障时,能自动切换至备用通道,双套切换时,励磁电流和电压以及所有工作状态均不发生任何改变,切换过程完全无抖动,并且可以实现不停机更换故障插件[2]。
4.2 保护功能强大
同步电机在运行过程中,受电网电压或负载突然波动的影响,经常发生失步现象,为此对失步保护进行重点论述。失步分为带励失步和失磁失步两种,失步保护是励磁主机通过检测电机转子感应电流的波形,并对其幅值、周期以及震荡次数进行分析,从而判断电机是否失步及何种类型的失步。当主机判断电机工作在带励失步状态时,将启动保护程序,同时调用失步再整步控制程序进行逆变灭磁加1 s 强励,将电机拉入同步,再整步投励后的一定时间内,若仍不能将电机拉入同步时,将跳闸停机,以确保设备安全。当电机工作在失磁失步状态时,保护将动作于跳闸。
4.3 与上位机通讯
WKLF-I1D22 型微机励磁装置具有RS-485 标准通讯接口,常规配置了MODBUS RTU 模式下的从站通讯软件,只要在读写控制器上进行简单设置,便能很容易与后台上位机进行通讯。所有的就地操作均可在中控室微机监控系统上完成,如:励磁装置的远方操作、运行参数的设置与修改、设备状态及工作参数的远传等,达到无人值班、少人值守的要求。
5 结语
近年来,随着大功率同步电动机在南水北调大型泵站中的广泛应用,人们对励磁装置也提出了更高的要求。以电力电子技术、现代控制理论与微机技术相结合,集“控制、保护、测量、通讯”于一体的新一代微机励磁装置在南水北调工程的应用中无疑占有很大的优势,并且在今后的运行中将发挥重要的作用。
[1]王运昌,刘成高,尹德庆,等.微机励磁系统在泵站工程中的应用[J].排灌机械,2004,22(6):19.
[2]阳汉文.泵站同步电动机励磁设备改造[J].湖南水利水电,2009(2):83.
