基于二次曲线拟合的隧道激光点云滤波方法及其应用
2015-12-11徐光华
徐光华
(吉林铁道职业技术学院,吉林吉林132200)
一、引 言
目前地铁隧道形变监测常用的方法主要是利用全站仪、断面仪、收敛计等[1-3]常规仪器进行监测,虽然精度高,但效率低下,难以实现对隧道整体进行实时自动监测。随着三维激光扫描仪测量精度的不断提高,其应用范围逐渐扩展到地铁隧道形变监测领域[4-5]。刘燕萍等[6]将隧道点云数据分割成切片,利用多点坐标平差计算圆心的方法求取切片圆心和半径,对拟合的圆环与设计值进行比较获取隧道的收敛变化情况;托雷等[7]提出一种可应用于变形监测的基于三维激光点云的隧道断面连续截取方法,并对断面拟合的精度进行分析,证明了拟合精度满足要求;王令文等[8]以隧道设计中轴线为基准提取隧道横断面,并结合扫描仪获得的影像数据进行断面收敛、渗水、裂缝等分析,表明采用该检测技术能够得到可靠的隧道检测信息;史玉峰等[9]采用基于几何特征点与ICP算法相结合的点云数据配准方法对多视点云数据进行配准,配准数据经去噪、精简后建立三维模型,最后对隧道两期扫描数据模型进行叠加分析,得到隧道部分纵横断面上的整体位移量;谢雄耀等[10]联合采用圆柱面拟合与椭圆拟合进行点云建模,并运用误差分布统计规律进行点云降噪,通过与全站仪的精度比较试验,验证了地面三维激光扫描技术在隧道变形测量中的可靠性。
综上所述,本文首先利用二次曲线拟合的隧道中轴线构建了地铁里程与隧道盾构环片之间的对应关系,然后沿中轴线对隧道盾构环片进行分割,针对分割后盾构片上附着的金属支架等噪声点,提出基于隧道设计半径的粗滤噪和基于多项式拟合的精滤噪相结合的滤噪方法,最后对滤噪后的两期隧道点云分别建立数字表面模型(DSM)并进行叠加分析,以获取不同里程处的隧道形变情况。为易于获取隧道整体各区域的形变情况,将隧道的两侧分别向外展开,由此可解决必须要变换视角才能获取隧道各区域形变的问题。
二、隧道激光点云处理方法
1.隧道中轴线及里程计算方法
隧道中轴线由离散点组成[11],设x方向的间距为Δx,单位mm,则中轴线的表达式为

式中,a1、b1、c1、a2、b2、c2为隧道中轴线的拟合参数;x0为中轴线的起始点。
若已知隧道内任一点坐标对应的里程值,即可建立以中轴线为基准的里程计算式(如图1所示)。设已知点p(x,y,z)处里程为K0+0,通过最近点搜索法确定出该点对应于中轴线某点pi(xi,yi,zi),p和pi处里程相同,即

在确定pi的里程为K0+0后,进一步利用轴线上离散点累加求得中轴线上任意点pn(xn,yn,zn)处的里程为
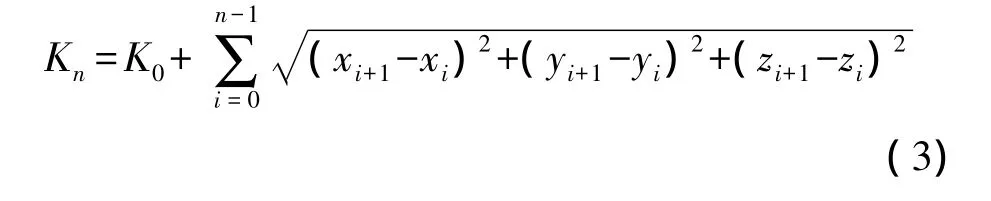

图1 里程对应图
2.隧道点云分割
如图2所示,沿中轴线以间隔d对隧道进行分割,设点 Oi(xi,yi,zi)处的里程为 K0+0,由式(4)可计算出 K0+d 处的坐标 Oi+1(xi+1,yi+1,zi+1)。过 Oi、Oi+1的法平面可分别表示为

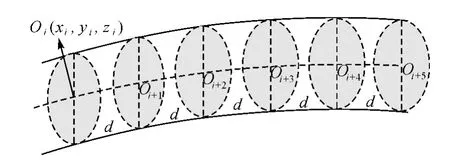
图2 点云分割示意图
由式(4)可得到里程位于K0+0至K0+d区域内的扫描点集Φi
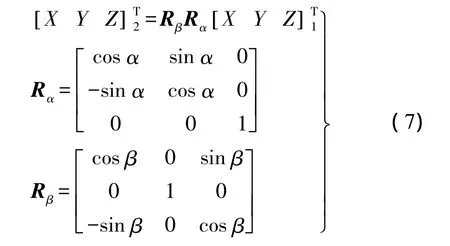
如图3所示,利用 Oi(xi,yi,zi)点处的切向量ei(1,y'i,z'i)对提取的离散点集Φi分别绕Z轴和Y轴旋转α、β,使转换后的X轴平行于ei,则

相应的坐标转换公式为
以Oi+1为起点,计算里程位于K0+d至K0+2d区域内点集Φi+1,以此类推,完成隧道整体点云的分割。
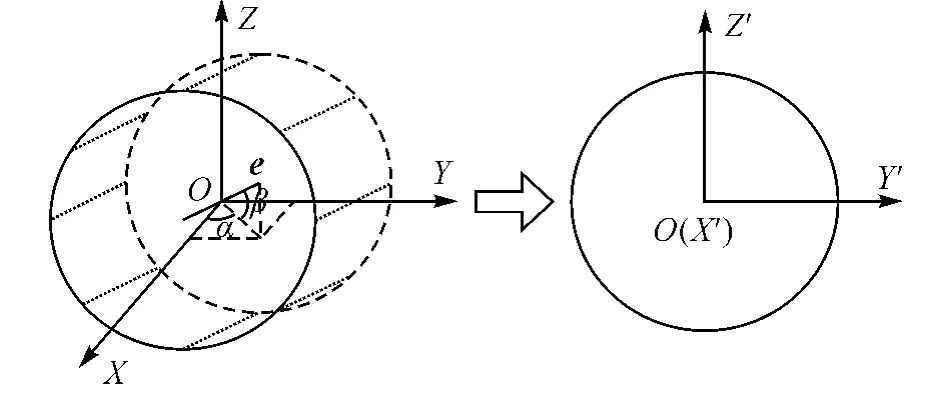
图3 旋转变换示意图
3.隧道展开
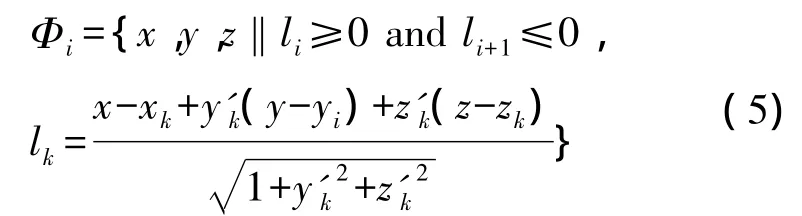
如图4(a)所示,以中轴线上的分割点为基准、Y轴正向为起始方向,沿45°和135°方向将分割后的各区域依次划分为左侧(L)、顶部(U)和右侧(R)3部分,在交点处分别将L和R向两侧旋转90°展开隧道,如图4(b)所示。点集Φi中L、U、R的划分为

式中,Δy=y-yi,Δz=z-zi,y、z为 Φi中的各点坐标,yi、zi为轴线上分割点Oi的坐标。
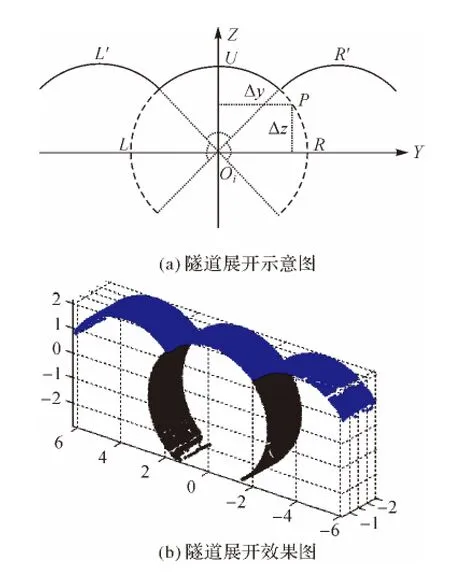
图4 隧道展开示意图
L、R的展开式可表示为
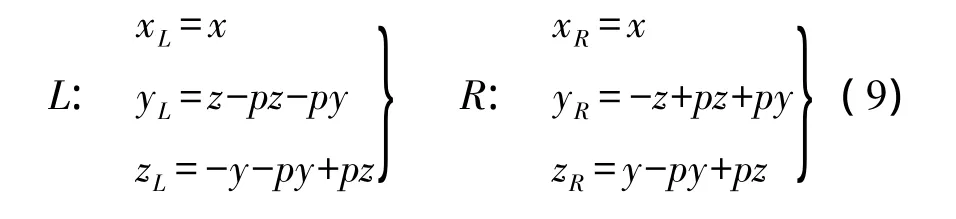
式中,py=yi+rcos(π/4),pz=zi+rsin(π/4),r为隧道半径。
对L、U、R按照式(8)进行坐标逆变换,完成点集Φi的展开,并依次对各分割区域的点云按上述步骤处理,完成隧道整体展开。
4.隧道点云滤噪
如图5(a)所示,粗滤噪是在隧道展开前利用各分割区域内的点到中轴线上分割点之间距离与隧道半径设计值r的差值大小进行滤噪,对点集Φi粗滤噪后得到的点集Φ'i可表示为

式中,γ为粗滤噪的阈值,表示隧道的最大位移量,实际工作中可适当调大。
如图5(b)所示,精滤噪是在隧道展开后对各分割区域内的L、U、R分别使用f次多项式拟合,进行迭代滤噪(f的选取在后文讨论)

以3倍均方差作为滤噪准则,对点集Φi中剩余的扫描点重新进行f次多项式拟合,然后使用新求解的参数计算点集Φi的均方差并再次滤噪,以此完成隧道点云的精滤噪。

图5 隧道点云的粗滤噪及精滤噪
三、试验验证
选择郑州市某地铁站(长度约为24 m)作为试验区,采集的两期点云数据间隔为120 d,扫描时竖直角与水平角分辨率均设为0.05°。图6(a)中曲线为拟合出的隧道中轴线,设定间距为1 mm。根据中轴线对隧道进行分割及粗滤噪,首先指定隧道盾构环片间缝隙上p作为里程起始点,记为K0+0;利用式(2)得到p点对应于中轴线上同一里程处的p',将分割间隔d设定为与隧道盾构管片宽度相等(1.5 m),考虑到管片的最大径向位移小于30 mm,将粗滤噪参数 γ设为 30 mm;然后按式(3)—式(10)完成对隧道各分割区域的粗滤噪及展开。展开后的L、U、R之间的距离取决于式(9)中设定的隧道半径r。图6(c)为r=3.0 m时隧道经粗滤噪后展开的结果。
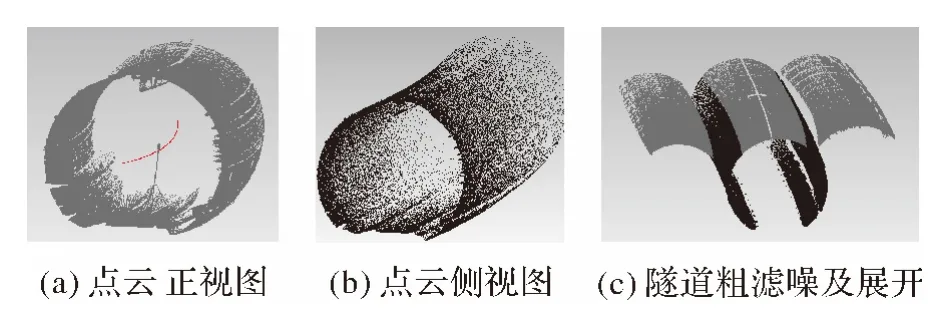
图6 隧道展开示意图
如图7所示,以位于K0+10.5至K0+12间盾构管片的R部为例,经过粗滤噪的单个隧道片仍附着了大量噪声点,因此需要利用多项式函数模型对经过坐标转换后的各隧道片进行精滤噪。将多项式次数 f分别取 2、3、4、5、6、7、8 时,滤噪效果如图8 所示。

图7 隧道L、U、R及单个隧道片
图8(a)为隧道片在YOZ面的投影,图8(b)—图8(f)中灰色曲线分别为 f取为 2、3、4、6、8 时拟合的函数曲线,表 1 列出了 f为 2、3、4、5、6、7、8 时滤噪后剩余的点数。由图8(e)—图8(f)可知,当f≥6时,拟合出曲线的边缘出现不规则的震荡,这与实际情况不符;当f≤6时,滤噪后剩余点数在f=4时取得最大值(见表1)。因此,选择f=4滤波效果最佳。图9为f=4时,单个隧道片及隧道整体的精滤噪结果。

表1 多项式次数及滤噪后的点数
本文对经过滤噪处理的两期隧道点云分别建立DSM,叠加后进行对比分析,得到隧道内壁不同量级的形变区域。图10为K0+0至K0+24区域内两期点云经滤噪、展开等操作后的叠加结果,图中浅灰色、深灰色区域分别为第1期、第2期DSM,叠加分析时,以第1期DSM为基准对第2期DSM向内、外两个方向偏移不同的k值,用于检测不同量级的形变区域。图11(a)、(c)、(e)为叠加后对第 2期DSM向外分别偏移5 mm、10 mm和15 mm的情况;图11(b)、(d)、(f)为叠加后对第2期DSM向内分别偏移5 mm、10 mm和15 mm的情况。
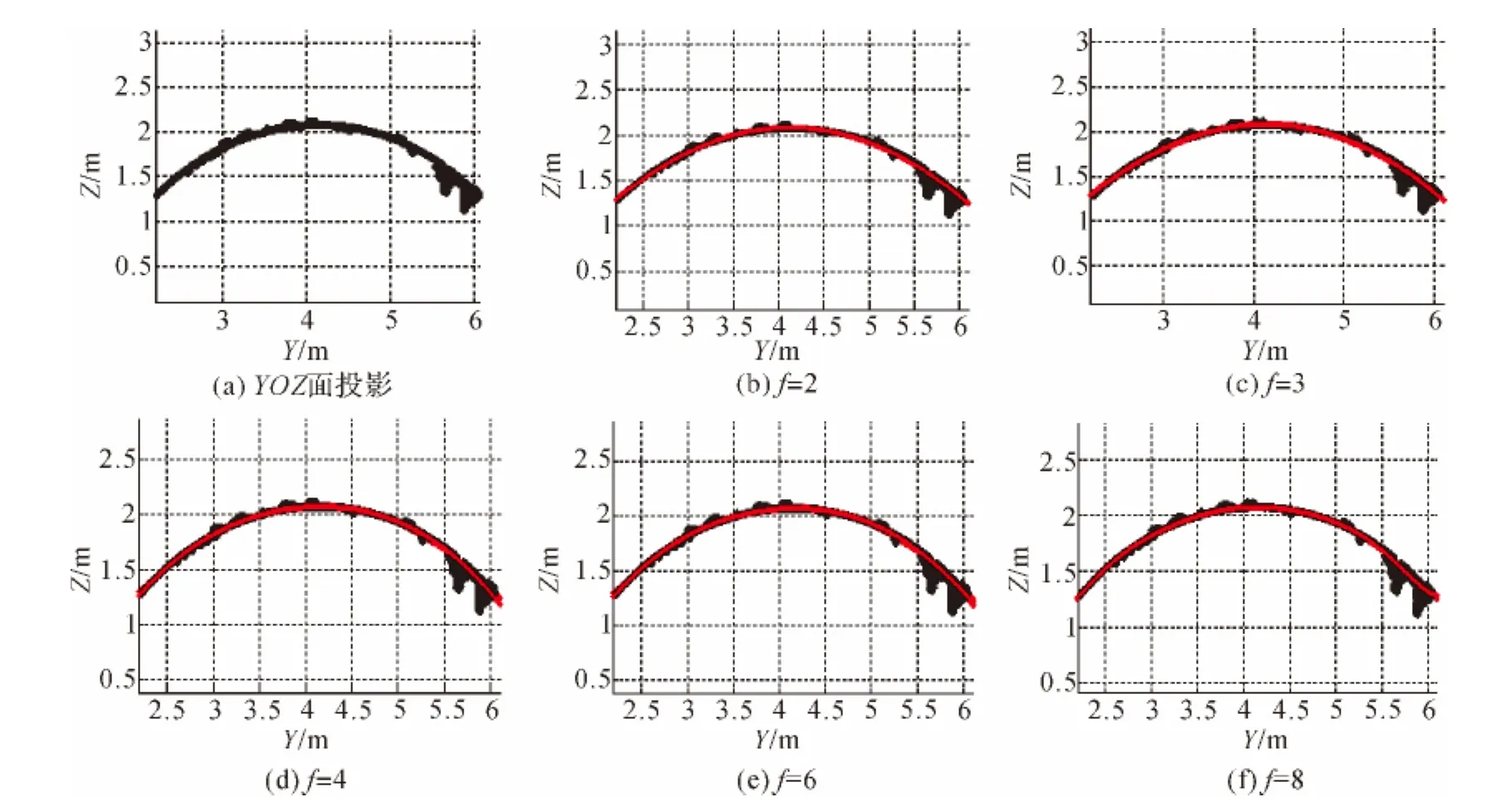
图8 不同次数滤噪效果
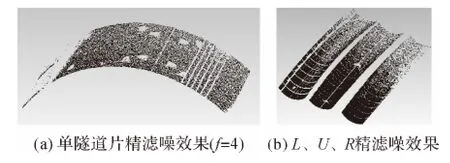
图9 隧道精滤噪结果
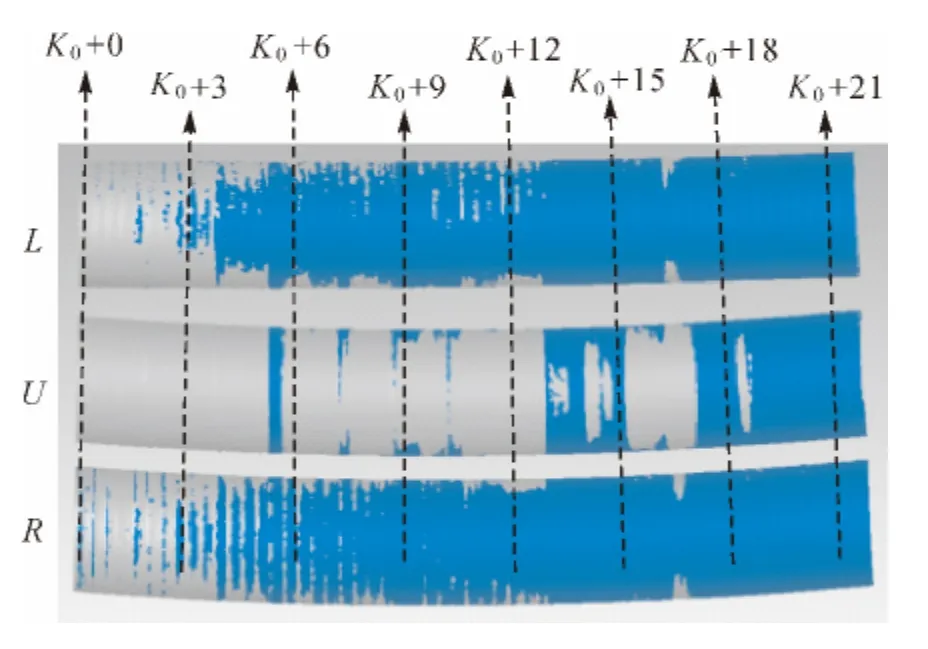
图10 两期隧道模型叠加
图11(a)中的浅灰色区域和图11(b)中的深灰色区域表示对应的隧道内壁点形变量大于5 mm;图11(c)中的浅灰色区域和图11(d)中的深灰色区域表示形变量大于10 mm;由图11(e)、(f)可知,该区间隧道形变量均小于15 mm。上述分析结果,与通过布设在隧道内壁上的监测点获取的监测结果一致。

图11 隧道形变分析
四、结束语
针对地铁隧道的形状特征,本文基于三维激光扫描仪获取的大数据量点云特点,提出以隧道中轴线为基准的隧道形变监测方法,通过点云分割、粗滤噪、隧道展开及精滤噪等处理流程,并对不同时期监测结果构建的DSM进行叠加分析,得到了隧道内任意点位的形变量。研究结果可为隧道点云滤噪及隧道监测方案设计等提供借鉴。
[1]陈荣彬,林泽耿,李刚.测量机器人在地铁隧道监测中的研究与应用[J].测绘通报,2012(6):61-63.
[2]曾鼎华,张永兴,阴可,等.三角形量测法在隧道变形监测中的应用研究[J].水文地质工程地质,2005(5):113-115.
[3]黎昵,岳建平.光纤变形传感技术及其应用分析[J].测绘通报,2007(11):34-36.
[4]毕俊,冯琰,顾星晔,等.三维激光扫描技术在地铁隧道收敛变形监测中的应用研究[J].测绘科学,2008,33(S2):14-15.
[5]夏国芳,王晏民.三维激光扫描技术在隧道横纵断面测量中的应用研究[J].北京建筑工程学院学报,2010(3):21-24.
[6]刘燕萍,程效军,贾东峰.基于三维激光扫描的隧道收敛分析[J].工程勘察,2013(3):74-77.
[7]托雷,康志忠,谢远成,等.利用三维点云数据的地铁隧道断面连续截取方法研究[J].武汉大学学报:信息科学版,2013,38(2):171-175.
[8]王令文,程效军,万程辉.基于三维激光扫描技术的隧道检测技术研究[J].工程勘察,2013(7):53-57.
[9]史玉峰,张俊,张迎亚.基于地面三维激光扫描技术的隧道安全监测[J].东南大学学报:自然科学版,2013(S2):246-249.
[10]谢雄耀,卢晓智,田海洋,等.基于地面三维激光扫描技术的隧道全断面变形测量方法[J].岩石力学与工程学报,2013(11):2214-2224.
[11]朱宁宁,张赵兴,姚方芳.点云在地铁隧道形变监测中的应用[J].测绘科学,2014,39(S1):84-87.