临近空间高速拦截制导研究*
2015-12-10李记新李友年
李记新,王 霞,李友年
(中国空空导弹研究院,河南洛阳 471009)
0 引言
临近空间一般是指距地面20~100 km的空间区域,处于现有飞机的最高飞行高度和卫星的最低轨道高度之间[1]。临近空间高超声速飞行器具有飞行距离远、飞行速度高、机动能力强、突防概率高等特点,拦截技术难度大,对拦截器的各项性能指标都提出了较高的要求。临近空间高超声速飞行器在无动力滑翔/助推巡航段主要飞行高度为30~40 km,该段飞行时间较长,留给拦截系统的时间窗口较大,在该段成功实施拦截的可能性更大。现有的 PAC-3、SM-3、THAAD和S-400(9M96E/9M96E2)等防空、反导拦截系统虽然对大气层外目标(高度大于100 km)、高层临近空间(高度40~100 km)目标和高度不大于30 km的目标具有直接碰撞杀伤能力,但无法有效拦截30~40 km高度滑翔/巡航的临近空间高超声速目标[2-4]。
文中以飞行高度30~40 km、速度5 Ma、最大机动能力为3 g的临近空间高超声速飞行器为典型拦截目标,分析了高速拦截末制导对直接力控制和导引系统的要求,研究了从临近空间平台上发射改进型红外成像空空导弹的拦截方法。
1 直接力控制要求
临近空间高超声速目标机动过载可能达到2~4[6],纯气动力控制情况下导弹的机动能力与之基本相当,必须采用直接力控制提高导弹的机动过载,才具备拦截机动目标的能力。通过合理设计,直接力控制技术还将有效提高导弹过载响应的快速性等动态品质,有利于提高制导精度。
1.1 快速性
使用五阶线性化比例制导系统模型进行直接力控制需求分析,五阶线性化比例制导系统如图1所示[10]。比例制导律有效导航比N取为4,弹目接近速度取为10 Ma,目标机动按3 g考虑。
图1 五阶线性化比例制导系统框图
假定在末制导初始时刻目标开始机动。机动特性如表1所示。目标机动引起的脱靶量如图2和图3所示(图中tf表示末制导时间),脱靶量最大值如表2所示。
分析表明:
图2 脱靶量(Tt=1s)
图3 脱靶量(Tt=3 s)
表2 攻击3 g机动目标的最大脱靶量
a)制导系统时间常数T对攻击机动目标的脱靶量有重要影响;
为保证钻孔垂直度,本工程采用“塔式钻具吊打防斜工艺”钻进。上部松散层及全风化基岩段采用“一开二(次)扩导向正循环施工工艺”,稳定基岩段采用“二开一(次)反提导向扩孔施工工艺”。
b)为保证对3 g机动目标的脱靶量不大于0.5 m,要求满足T≤0.22 s(30 km)和T≤0.32 s(40 km)。
1.2 机动过载要求
定义导弹加速度指令饱和幅值与目标机动加速度幅值之比为加速度比率,对于机动目标拦截问题,在图1所示线性化比例制导系统模型的基础上,考虑导弹的加速度指令饱和限幅进行仿真分析,仿真得到的加速度比率与脱靶量峰值之间的关系如图4所示。
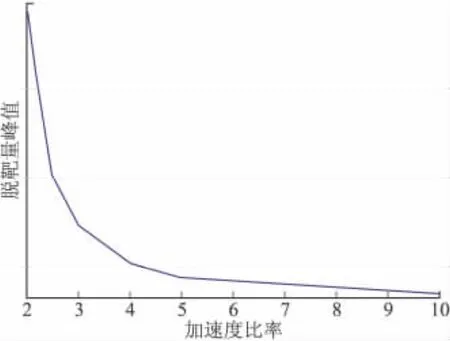
图4 加速度比率-脱靶量峰值曲线
分析表明,在不影响制导精度的前提下,可以适当放宽导弹机动过载需求。加速度比率取2.5~3即可,对应的过载需求如表3所示。

表3 典型飞行条件下制导控制系统指标分解
1.3 直接力控制系统指标分解
为减小过载需求,同时尽量减小对制导精度的影响(按照脱靶量峰值≤0.5 m来考虑)加速度比率取2.5~3,制导控制系统指标需求分解结果如表4所示,其中T为制导系统时间常数,Ts为导引头时间常数,Tg为制导滤波器时间常数,Ta为直接力控制自动驾驶仪时间常数。

表4 制导控制系统指标需求分解
实际上导引头时间常数可以达到0.03 s,直接力控制驾驶仪能够达到的时间常数为0.025~0.1s[3],制导控制系统指标分解如表5所示。

表5 制导控制系统指标分解
2 导引头需求
2.1 导引体制
典型的高超声速飞行器一般采用乘波体构型,雷达散射面积通常只有0.01~0.1 m2,高速飞行时飞行器周围形成等离子体,进一步提高雷达隐身性能。典型乘波体外形高超声速飞行器的上、下表面附近的空间区域红外辐射强烈,下表面的高温强激波使得下方的红外辐射进一步加强,两侧区域和正迎头方向的红外辐射较弱。红外辐射在临近空间传输过程中的大气衰减小,易于远距离探测,有利于提高截获概率,保证足够的末制导时间。拦截临近空间高超声速目标,要求导弹的飞行速度很高,而高速飞行时光学头罩会存在气动热问题,需要通过适当的技术手段解决[4-9]。
2.2 截获距离
通过线性化比例制导系统分析可知,目标机动(单位阶跃)和初始航向误差对比例制导系统脱靶量的影响与末制导控制刚度(控制刚度定义为末制导时间除以制导系统时间常数T)有关,末制导控制刚度需要达到6~10以上才能有效克服目标机动和初始航向误差对脱靶量的影响[10]。由此可知:
a)在30~40 km高度,采用气动力控制时,制导系统时间常数最大约为3 s,理论上所需的最小末制导时间约为18~30 s;
b)采用直接力控制时,制导系统时间常数为0.105~0.18 s,按照0.15 s考虑,理论上所需的最小末制导时间为0.9~1.5 s。
2.3 分辨率、帧频
基于SIMULINK的二维平面比例导引末制导系统如图5所示,简化的导引头模型如图6所示。通过蒙特卡罗仿真分析导引头分辨率、帧频对脱靶量的影响。仿真设置如下:
a)制导系统为五阶系统,时间常数为0.15 s,导引头一阶,制导滤波器一阶,自动驾驶仪三阶;
b)比例制导律有效导航比为4;
c)加速度指令限幅9 g;
d)导弹、目标速度均为5 Ma;
e)导弹、目标速度夹角180°;
f)弹目连线与导弹初始速度夹角为1°;
g)目标不机动;
h)仿真500次:末制导开始时刻弹目距离从6 000 m变化到6 499 m,步长1 m。

图5 二维平面比例导引末制导系统

图6 简化的导引头跟踪测量模型
仿真统计结果如表6所示,分析表明:
a)按脱靶量≤0.5 m要求考虑,分辨率128×128、帧频100 Hz可以接受;

表6 分辨率、帧频对制导精度的影响
b)提高分辨率和帧频都能够改善脱靶量,若需要进一步优化制导精度性能,那么从经济性和工程实现难易的角度看,较好的方案是分辨率128×128、帧频200 Hz,或者分辨率256 ×256、帧频 100 Hz。
3 高速拦截制导方案
3.1 制导系统原理
制导系统原理框图如图7所示。导弹采用发射后截获方式和“中制导+末制导”复合制导体制。在航空空域红外成像空空导弹基础上,增加GPS接收装置、数据链和侧向喷流直接力轨控+姿控装置,改进电源组件以增加工作时间,设计GPS/SINS组合导航算法、射后截获算法,改进滤波算法、制导算法和稳定算法,以适应拦截高超声速临近空间目标的作战要求。
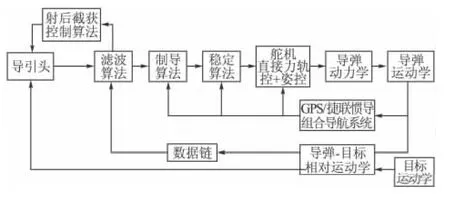
图7 制导系统原理框图
3.2 拦截过程
设想从临近空间飞行器平台上发射改进型红外成像空空导弹,以迎头方式攻击临近空间高超声速飞行器。临近空间飞行器平台在30~40 km高度发射导弹攻击目标。
导弹采用双脉冲发动机,第1个脉冲用于快速提高导弹速度,第2个脉冲用于增加末段飞行速度、提高射程。在中制导段,利用数据链和捷联惯导信息,按照增程中制导律形成加速度指令,仅通过气动舵进行导弹控制。导引头采用传统的半球形光学整流罩,为解决高速飞行面临的气动热问题,需要加装整流罩进行保护,通过合理设计推力/速度曲线和选择适当时机抛罩,可以减小气动热影响。导引头截获目标后转入比例导引末制导。末制导段大部分时间采用纯气动力控制方式,用于消除大部分制导误差;在弹道末端1~2 s内,启动直接力姿控和轨控,实现导弹快响应控制和高精度制导,最终导弹以直接碰撞的方式击毁目标。
3.3 仿真算例
为验证拦截方法的可行性,建立初步的临近空间高速拦截弹制导系统六自由度仿真模型进行数字仿真,模型考虑了双脉冲发动机总冲/推力特性、导弹质量和阻力特性,未使用直接力控制。仿真攻击条件如下:
a)目标高度40 km,速度5 Ma,不机动;
b)载机高度35 km,速度5 Ma;
c)发射距离500 km;
d)载机平飞,载机速度与目标速度的夹角为180°。
仿真弹道示意图如图8所示。仿真结果表明,从临近空间平台上发射改进型红外成像空空导弹的拦截方法,对不机动目标迎头攻击距离达到500 km,脱靶量0.5 m。
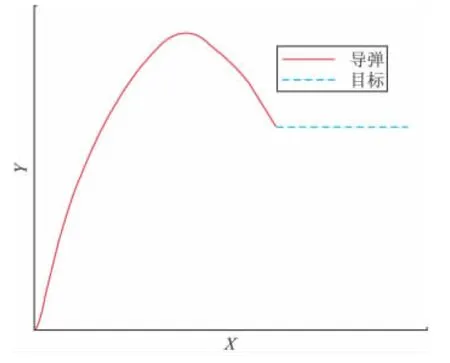
图8 仿真弹道示意图
4 结论
文中以飞行高度30~40 km、速度5 Ma、最大机动能力为3 g的临近空间高超声速飞行器为典型拦截目标,分析了高速拦截末制导对直接力控制和导引系统的要求。研究了从临近空间飞行器平台发射改进型红外成像空空导弹对高超声速目标进行拦截的方法,数字仿真表明这种拦截方法是可行的,能够实现对临近空间高超声速飞行器的远距、高精度拦截。
[1]朱福娟,张华.一种临近空间飞行器的新型发射方法[J].装备指挥技术学院学报,2006,17(5):61-63.
[2]李小将,李志德,杨健,等.临近空间装备体系概念及关键问题研究[J].装备指挥技术学院学报,2007,18(4):72-77.
[3]朱隆魁.防空导弹直接力和气动力复合控制技术研究[D].长沙:国防科学技术大学,2008.
[4]呼卫军,周军.临近空间飞行器拦截策略与拦截武器能力分析[J].现代防御技术,2012,40(1):11-15.
[5]戴静,程建,郭锐.临近空间高超声速武器防御及关键技术研究[J].装备指挥技术学院学报,2010,21(3):58-61.
[6]张胜涛,陈方,刘洪.近空间高超飞行器气动热红外特性数值仿真[J].计算机仿真,2010,27(1):114-118.
[7]马丽,杨建军,张维刚.高超声速飞行器发展综述[J].飞航导弹,2012(6):26-31.
[8]张燕鹏,李晓波,薛俊诗.对高超声速目标的跟踪及算法研究[J].航天电子对抗,2013,29(5):19-22.
[9]张胜涛.临近空间高超声速飞行器绕流红外辐射特性数值模拟研究[D].上海:上海交通大学,2009.
[10]Zarchan Paul.Tactical and strategic missile guidance 5thEdition[M].American Institute of Aeronautics and Astronautics,Virginia,2007.
