直线电机式主动悬架协调车身姿态控制研究
2015-12-09谢健汪若尘叶青孟祥鹏陈龙
谢健++汪若尘++叶青++孟祥鹏++陈龙
摘 要:将直线电机作为汽车主动悬架的作动器,能实现悬架的主动减振。建立整车主动悬架的动力学模型和直线电机的数学模型,输入三相交流电,测试直线电机的电磁力,仿真与试验的结果较为一致,验证了电机数学模型的正确性。基于整车姿态协调控制原理,结合模糊控制理论和电流滞环控制策略,研究了包含直线电机作动器的车辆主动悬架的动态响应。结果表明,该控制策略可行,且控制系统能有效改善车辆舒适性和行驶安全性,车身姿态也得到有效控制。
关键词:主动悬架;直线电机;姿态;模糊控制;电流滞环
中图分类号:TP391.9文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2015.05.05
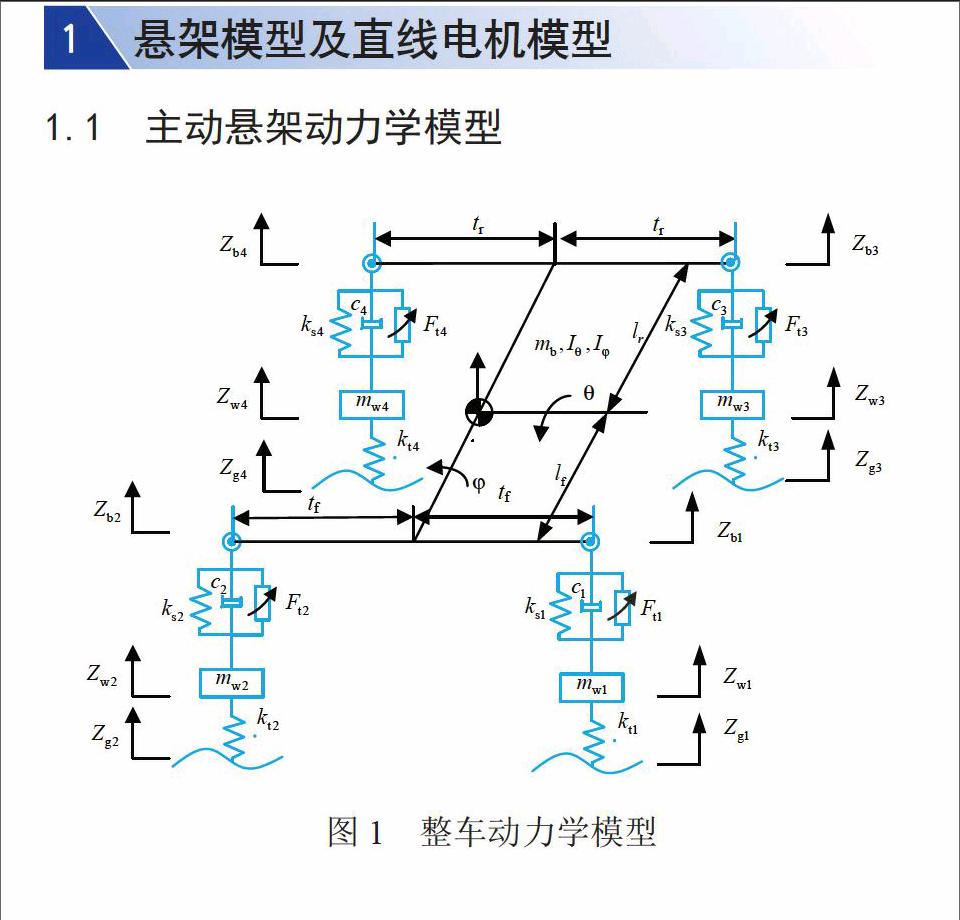
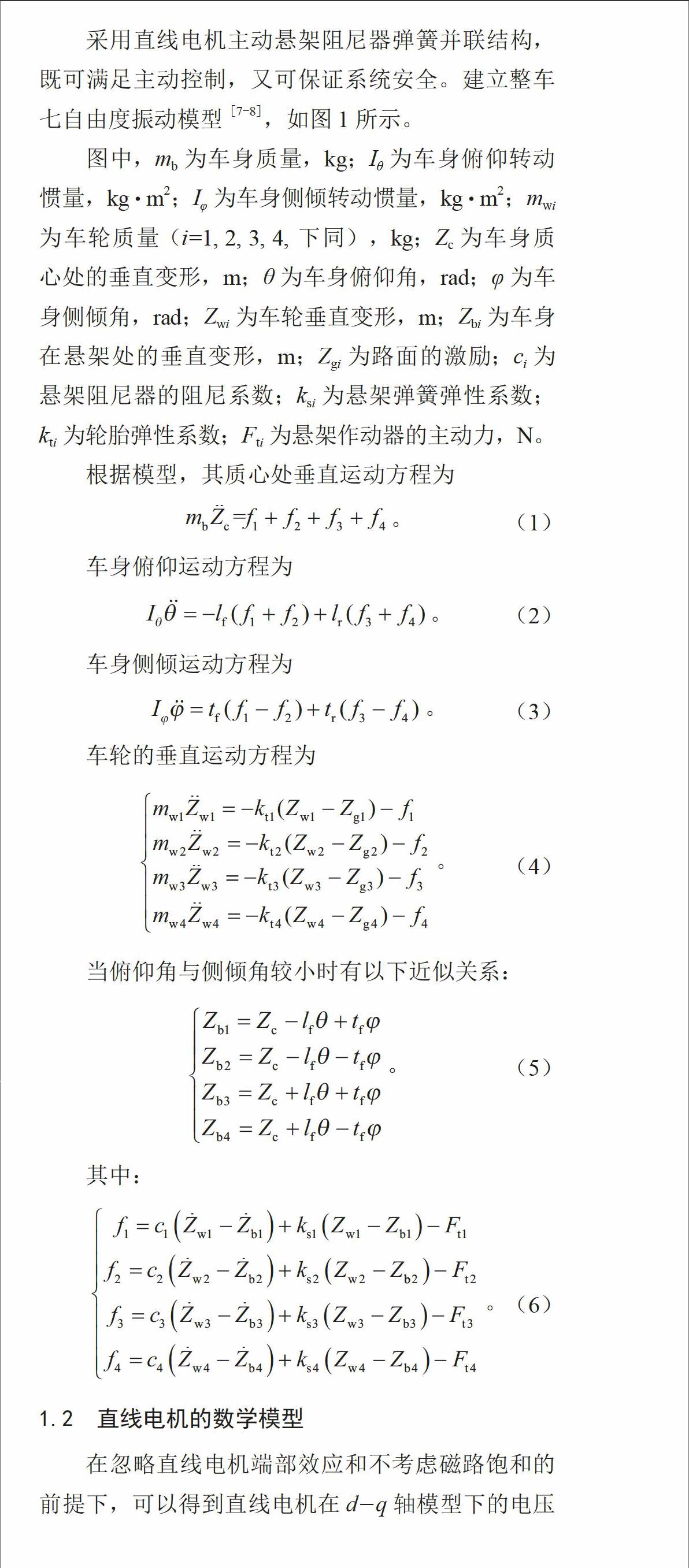
车辆的舒适性和操纵稳定性很大程度上由悬架系统决定。为此,国内外学者已对主动悬架控制方法进行了比较完整的研究。但是,对于悬架系统中作动器的研究却比较少见。2004年,Bose公司应用直线电机设计了一种电磁悬架,该电磁悬架减振性能卓越,对车辆制动时的车身前倾、转弯时的车身侧倾和越障时的车身振动有显著的抑制作用,而且在抵消道路冲击的同时可回收部分能量[1]。2006年,Martins等人研制了圆筒型永磁直线电机作动器,基于天棚阻尼原理,设计了电机作动器的闭环控制系统[2]。2012年,罗虹等人对主动悬架采用的直线电机控制系统进行了研究,分析了PI参数对电磁力的影响[3]。同年,陈星等人设计了直线电机馈能悬架的控制系统,并进行了馈能分析[4]。2014年,陈冬云等人采用电磁作动器功率流计算方法分析了馈能主动悬架的可回馈能量[5]。
文献[2]和[3]所设计的控制算法较为复杂,文献[4]和[5]只是做了理论上的能量计算分析,本研究将控制算法简化后也能达到较好的控制效果,所以也具有实际的工程应用价值。
直线电机相比其它类型的作动器,具有控制精度高、能量回收效率高、不需润滑、结构简单等优势[6]。基于上述特点,本文所研究的是用于主动悬架的直线电机作动器。针对此直线电机作动器,建立了整车主动悬架的振动模型和直线电机的数学模型,同时通过试验台架测试了直线电机的电磁力,试验与仿真的结果基本吻合。在此基础上,基于整车姿态协调控制原理,结合悬架模糊控制理论和直线电机电流滞环控制策略,设计了直线电机式主动悬架主动力控制系统,研究了该主动悬架的动态响应。通过该控制策略,有效改善了车身的姿态,缓冲了不平路面冲击,抑制了车身的垂向振动,提高了汽车的抗俯仰和抗侧倾能力。
2 悬架的主动控制
在路面激励下,车辆主动悬架系统会受迫振动,通过模糊控制器[12-14]分别计算出四个直线电机所需要的主动控制力,然后通过电流滞环[15-16]控制直线电机输出电磁力跟踪主动控制力,实现悬架的主动控制。图2为主动悬架控制原理图。
2.1 直线电机电流滞环控制
直线电机工作的方式和旋转电机的工作方式有所区别,现控制交轴电流来实现励磁电流和推力电流之间的解耦。电流滞环控制的原理是将电流控制于所能够容许的误差范围内,把指令电流i*和实际输出电流i的偏差作为滞环比较器的输入,通过比较器的输出控制开关管V1和V2的通断,V1通时,i增大;V2通时,i减小。通过比较器的控制,i就在和的范围内,呈锯齿状地跟踪指令电流i*。原理如图3所示。
2.2整车姿态协调模糊控制
车辆行驶过程中,整车运动会出现垂直、俯仰以及侧倾的运动耦合,会呈现不同的运动姿态[17],而直线电机式主动悬架的控制目标是尽量衰减这些运动,调整车辆的运动姿态,提高车辆的乘坐舒适性。单一的控制模态显然满足不了多姿态的控制要求。通过大量的仿真和试验研究,车辆行进中的运动姿态可以划分为以下八种情况:(1)垂直、俯仰和侧倾运动都较小。(2)单独的垂直运动。(3)单独的俯仰运动。(4)单独的侧倾运动。(5)垂直和俯仰运动耦合。(6)垂直和侧倾运动耦合。(7)俯仰和侧倾运动耦合。(8)垂直俯仰及侧倾运动耦合。第一种运动车身姿态变化较小,舒适性和操纵稳定性都能得到保证,采用开环保持控制策略,其余的运动姿态是垂直、俯仰以及侧倾运动中的一种或多种运动的耦合,为了简单有效地达到理想的控制效果,整车控制部分采用整车姿态协调模糊控制。
第八种运动存在三种运动的耦合,具有代表性,因此以第八种运动姿态为例,设计控制方法。针对车身的三种运动设计不同的模糊控制器,在Matlab/Simulink中分别建立抑制车身的垂直振动、车身的俯仰和侧倾的控制器。输入为车身速度及其变化率、车身俯仰角速度及其变化率和车身侧倾角速度及其变化率,由于可以将整车解耦成4个单轮模型、前后两个半车模型和左右两个半车模型,那么4个悬架中的任意一个悬架的输出力是下面3个力之和,它们分别为:1/4个垂直运动控制器计算出的力;1/2个俯仰运动控制器计算出的力;1/2个侧倾运动控制器计算出的力,具体如图4所示。模糊规则见文献[14]。
车身垂直速度及其变化率的基本论域分别为[-0.15, 0.15]和[-1.5, 1.5],作动器主动力的基本论域为[-6, 6],模糊论域为{-6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6},量化因子Ke、Kec和比例因子Ku分别为40、4、133。
车身俯仰角速度及其变化率的基本论域分别为[-0.06, 0.06]和[-1.5, 1.5],作动器主动力的基本论域为[-6, 6],模糊论域为{-6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6},量化因子Ke、Kec和比例因子Ku分别为100、4、133。
车身侧倾角速度及其变化率的基本论域分别为[-0.2, 0.2]和[-3, 3],作动器主动力的基本论域为[-6, 6],模糊论域为{-6, -5, -4, -3, -2, -1, 0, 1, 2, 3, 4, 5, 6},量化因子Ke、Kec和比例因子Ku分别为30、2、133。整车模型参数见表1。
3 直线电机特性试验验证
文章基于INSTRON 8800 数控液压伺服激振试验台,对直线电机作动器数学模型进行了台架试验验证,本文选用的直线电机为永磁同步直线电机,动子部分由永磁体组成,定子部分由绕有线圈的磁钢组成。
试验设备:INSTRON 8800 数控液压伺服激振试验台(图5)、万用表、三相调压器、电流传感器。
试验方案为:将直线电机初级通过上夹具与横梁固定。然后,将下夹具固定在激振台上。将试验设备通电,将伺服激振台通过液压泵升高到平衡位置,然后通过三相调压器向直线电机输入三相交流电,直线电机有外界的电压输入便会产生电磁力,激振台上的传感器可以测量直线电机输出的电磁力。由于此时电机是类似于堵转的,必须快速测出此时的电磁力,防止电机过热烧坏。
分多次向直线电机输入三相交流电,每个电压下重复两次取平均值。图6为直线电机电磁力对比图。
将试验的结果与仿真计算的结果对比,发现计算值误差在7%之内,说明建立的直线电机模型能够满足使用要求。
4 仿真结果分析
在Matlab/Simulink仿真分析软件中建立该悬架系统模型。直线电机作动器的直流电压为E=311 V。仿真采用参考文献[18]的有限带宽白噪声作为路面输入,路面等级为B级,车速为20 m/s,仿真结果如图7所示。
由表2可以看出,主动悬架车身的垂向、俯仰和侧倾加速度3个评价指标的均方根值均有较大幅度的降低,相比传统悬架分别下降了23.07%、13.24%和19.63%。结果表明:基于整车姿态协调模糊控制理论和直线电机电流滞环控制的控制策略可行性强,有效改善了车身的姿态,缓冲了不平路面的冲击,抑制了车身的垂向振动,提高了汽车的抗俯仰和抗侧倾能力,使车辆的行驶平顺性得到了较大改善。
5 结论
(1)建立了直线电机式主动悬架的数学模型,直线电机特性试验验证了直线电机模型的正确性。
(2)结合整车姿态协调模糊控制理论和直线电机电流滞环控制方法,设计了悬架主动控制系统。仿真结果表明,该控制策略可行性强,使车辆的行驶平顺性得到了较大提升,有效改善了车身的姿态。
参考文献(References):
Bose公司推出主动悬挂控制系统 [Z]. 汽车每日咨询,2004.
Bose Launched the Active Suspension Control System [Z]. Automobile Daily Consultation,2004. (in Chinese)
MARTINS I,ESTEVES J,MARQUES G D,et al. Permanent-Magnets Linear Actuators Applicability in Automobile Active Suspensions [J]. Vehicular Tech-nology,IEEE Transactions on,2006,55(1):86-94.
罗虹,陈星. 主动悬架的直线电机作动器控制系统研究 [J]. 系统仿真学报,2012,24(7) :1537-1542.
Luo Hong,Chen Xing. Research on Control System of linear Motor Actuator Used in Active Suspension [J]. Journal of System Simulation,2012,24(7) :1537-1542. (in Chinese)
陈星,罗虹,邓兆祥. 直线电机馈能悬架控制系统设计与馈能分析 [J]. 振动与冲击,2012,31(8):124-129.
Chen Xing,Luo Hong,Deng Zhaoxiang. Design of an Energy-Regenerative Suspension Control System Using Linear Motor and Energy Recovery Analysis [J]. Journal of Vibration and Shock,2012,31(8):124-129. (in Chinese)
陈冬云,杨礼康,蔡明龙. 限定舒适性的馈能主动悬架系统可回馈能量分析[J]. 机电工程,2014,31(3):289-294.
Chen Dongyun,Yang Likang,Cai Minglong. Analysis of Energy-Harvesting Active Suspension Based on Certain Riding Confort [J]. Journal of Mechanical & Electrical Engineering,2014,31(3):289-294. (in Chinese)
KAWAMOTO Y,SUDA Y,INOUE H,et al. Modeling of Electromagnetic Damper for Automobile Suspension [J]. Journal of System Design and Dynamics,2007,1(3): 524-535.
张孝良. 蓄能悬架系统及其试验 [D]. 镇江:江苏大学, 2009.
Zhang Xiaoliang. Suspensions Employing Inerter and Its Bench Test [D]. Zhenjiang:Jiangsu University, 2009. (in Chinese)
祝辉,陈无畏. 汽车悬架、转向和制动系统建模与相互影响分析 [J]. 农业机械学报,2010,41(1):7-12.
Zhu Hui,Chen Wuwei. System Modeling and Interaction Analysis of Vehicle Suspension,Steering and Braking System [J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(1):7-12. ( in Chinese)
张代林,陈幼平,艾武,等. 永磁直线电机保证稳态精度的模糊控制 [J]. 电工技术学报,2007,22(4):64-68.
Zhang Dailin,Chen Youping,Ai Wu,et al. A Precision Fuzzy Control Method of Permanent Megnetic Linear Motors [J]. Transactions of China Electrotechnical Society,2007,22(4):64-68. (in Chinese)
樊立萍, 刘义. 直线电机的H∞迭代学习控制设计 [J]. 电力系统及其自动化学报,2009,21(2):87-91.
Fan Liping,Liu Yi. Design of H∞ Iterative Learning Control for Linear Motor Motion System [J]. Proceedings of the Chinese Society of Universities for Electric Power System and its Automation,2009,21(2):87-91. (in Chinese)
翟小飞,张俊洪,赵镜红. 永磁同步直线电机的MATLAB 仿真及其定位实验 [J]. 船电技术,2006, 26(4): 6-9.
Zhai Xiaofei,Zhang Junhong,Zhao Jinghong. The Matlab Simulation of the Permanent Magnetic Linear Synchronous Motor and Positioning Experiment [J]. Marine Electric & Electronic Engineering,2006, 26(4):6-9. (in Chinese)
艾延廷,王志,甘世俊,等. 多自由度车辆模型半主动悬架模糊控制 [J]. 振动与冲击,2007,26(3):19-22.
Ai Yanting,Wang Zhi,Gan Shijun,et al. Fuzzy Semi-Active Suspension Control Based on Multi-degree of Freedom Vehicle Model [J]. Journal of Vibration and Shock,2007,26(3):19-22. (in Chinese)
陈龙,黄晨,江浩斌,等. 基于悬架效用函数的车身姿态控制 [J]. 农业机械学报,2011,42(8):15-19.
Chen Long,Huang Chen,Jiang Haobing,et al. Body Posture Control Based on Suspension Utility Function [J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(8):15-19. (in Chinese)
陈龙,刘勺华, 黄晨. 整车半主动悬架模糊控制研究 [J]. 机械设计与制造,2011(3):86-88.
Chen Long,Liu Shaohua,Huang Chen. Study on Semi-Active Suspension Based on Fuzzy Control [J]. Machinery Design & Manufacture,2011(3): 86-88. (in Chinese)
邱忠才. 直线感应电机控制系统研究 [D]. 成都:西南交通大学,2006.
Qiu Zhongcai. Linear Induction Motor Control System [D]. Chengdu:Southwest Jiaotong University,2006. (in Chinese)
伍小杰,罗悦华,乔树通. 三相电压型PWM整流器控制技术综述 [J]. 电工技术学报,2005,20(12):7-12.
Wu Xiaojie,Luo Yuehua,Qiao Shutong. A Control Tech-nical Summary of Three-phase Voltage-Source PWM Rectifiers [J]. Transactions of China Electrotechnical Society,2005,20(12):7-12. (in Chinese)
董小闵,余淼,廖昌荣,等. 汽车磁流变半主动悬架整车分姿态协调控制研究[J]. 功能材料,2006(5):793-795.
Dong Xiaomin,Yu Miao,Liao Changrong,et al. Research
on Attitude Harmony Control of Full Car for Magneto-Rheological Suspension [J]. Journal of Functional Mate-rials,2006(5):793-795. (in Chinese)
黄昆,张勇超,喻凡,等. 电动式主动馈能悬架综合性能的协调性优化 [J]. 上海交通大学学报,2009, 43(2):226-230.
Huang Kun,Zhang Yongchao,Yu Fan,et al. Coordinate Optimization for Synthetical Performance of Electrical Energy-Regenerative Active Suspension [J]. Journal of Shanghai Jiaotong University, 2009,43(2): 226-230. (in Chinese)
