四轮独立驱动与转向电动车辆运动控制系统及控制策略研究
2015-12-09来鑫陈辛波武晓俊梁栋
来鑫++陈辛波++武晓俊++梁栋

摘 要:介绍了一种四轮独立驱动与转向(four-wheel independent driving and steering,4WIS-4WID)电动车辆的结构和原理,对其电子操纵系统进行了设计,在此基础上构建了一种基于CAN总线的车辆运动网络控制系统。该电动车辆具有全轮转向、前(后)轮转向、平行移动、原地转向等多种转向模式,分别对这些运动转向模式进行运动学建模。在控制策略上提出了一种分布式“位置—速度”双环反馈控制策略,各车轮转向角同时调节,车轮运动动态跟踪性能良好,车辆满足实时运动学要求。最后通过实车试验验证了网络控制系统结构和控制策略的有效性。
关键词:电动车辆;四轮独立驱动与转向;运动学建模;控制策略
中图分类号:TH-39文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2015.05.04
与传统车辆相比,四轮独立转向(Four-Wheel Independent Steering,4WIS)车辆有如下优点[1-2]:具有更多自由度,车辆的机动性及循迹能力更高;转向操作的响应速度及准确性更高;具有更小的转弯半径,操纵稳定性与灵便性强。4WIS能较好地满足现代车辆对舒适性、安全性、机动性、操纵稳定性的要求,成为了国内外研究的热点。近年来随着电池技术及电机技术的发展,以轮毂电机为动力直接驱动的四轮独立驱动(Four-Wheel Independent Driving,4WID)车辆得到了很好的发展,它具有结构简单、驱动力分布灵活可控、通过性能好、爬坡能力及起步加速性能出色等优点[3]。四轮独立驱动与转向车辆结合4WID与4WIS技术,具有直行、蟹行、前轮转向、后轮转向、绕任意点转向、零半径转向等多种运动模式[4],在车间物流车、科考车辆、农业特种车等方面得到了广泛应用[5-7]。
传统车辆的车轮通过机械机构连接在一起,各车轮之间运动关系是明确的,而对于具有高机动性的4WIS-4WID车辆,各车轮的运动是独立控制的,各车轮的运动状态都会影响车辆的运行状态,因此构建适宜的车辆运动控制系统及控制策略是至关重要的。
本文首先对一种四轮独立驱动和转向电动车辆的结构与原理进行了分析,并对其电子操控系统进行设计,在此基础上提出一种基于CAN(Controller Area Network)总线的车辆运动控制系统。对车辆几种典型运动模式进行动力学与运动学建模,并对控制策略进行研究,最后通过试验验证控制系统结构及算法的有效性。本文的研究结论为相关4WIS-4WID车辆的运动控制提供参考。
1 4WIS-4WID电动车辆基本结构
所设计的4WIS-4WID电动车辆结构示意图如图1(a)所示。该电动车的驱动力由四个独立的轮毂电机提供,四个车轮之间没有任何机械动力传动装置。通过轮毂电机控制器可以自由分配各个驱动电机的转矩,使车辆具有较好的防滑能力、加速性能及驾驶稳定性。转向系统结构如图1(b)所示,电机及电机减速器固定在车身上,转向动力传递路径为:电机→减速器→主销套筒→上转向臂→下转向臂→主销活塞,实现转向,四个车轮均可单独在[-π/2,π/2]内转动。该结构利用上下转向臂传递转向转矩,弹簧阻尼传递动载荷,具有结构紧凑、定位参数易确定等优点。各车轮的转角由一定的控制策略与算法独立控制。
4WIS-4WID车辆具有多种运动模式,为了方便操控车辆的运动,设计了如图2所示的电子操控系统,车辆操控信号采集及处理控制器(ECU1)实时采集方向盘转角、油门踏板开合角及运动模式选择按钮信号。测量方向盘转角的转角传感器采用绝对式编码器进行测量,ECU1对正交脉冲信号进行高速捕获,并从中提取出转角信号及方向信息。电子油门踏板的信号为模拟量,ECU1通过AD采样将其转换为数字量。运动模式通过控制器ECU1采集开关信号实现,根据需求共设置了七个选择开关,分别对应全轮转向模式、普通转向模式(包括前轮转向模式、后轮转向模式)、平行移动模式(包括直走、横走、斜走)、原地转向模型。
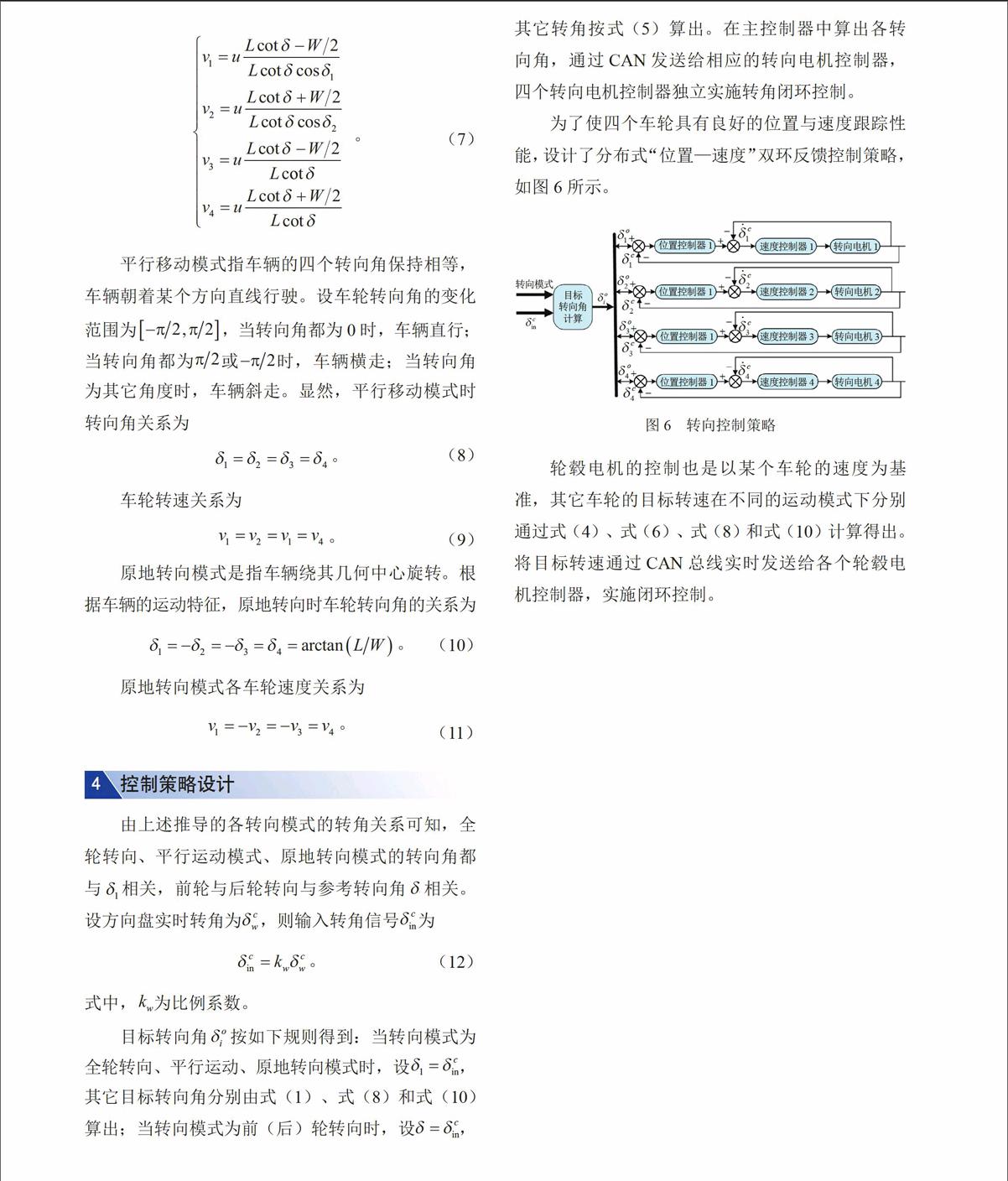
ECU1将这些反映驾驶员驾驶意图的信号通过CAN总线发送给主控制器ECU0,ECU0根据一定的控制策略与算法实时计算出各车轮的目标转角值,并通过CAN总线将其分别发送给相应的转向电机控制器ECU2-ECU5,对四个转向电机进行闭环控制。同理控制器ECU0通过CAN总线控制四个轮毂电机的驱动力矩。实现车辆复杂的运动轨迹,提高车辆的机动性与稳定性。
2 控制系统结构
从4WIS-4WID车辆的结构可知,车辆操控的控制对象为四个转向电机与四个轮毂电机。控制系统对车辆行驶安全性及操纵灵敏性至关重要,要求其具有较高的可靠性、实时性和较强的抗干扰能力。CAN总线具有可靠性高、实时性强等优点而得到广泛应用[8],因此本文设计了一种基于CAN总线的网络控制系统,其结构简图如图3所示。方向盘及油门踏板信号采集及处理控制器的作用是采集方向盘的转角信号、油门踏板夹角、转向模式开关选择信号,并将这些信号通过CAN总线发送给主控制器。主控制器为整个系统的决策层,它的主要功能是通过CAN总线接收相关传感信息,根据一定的控制策略与算法实时计算出四个转向电机的目标转角(、、、)和四个驱动轮毂电机的目标转矩(T1、T2、T3、T4),并通过CAN总线实时地将控制量发送给相应的转向及驱动控制器。上位PC机通过CAN转USB接口实现操控界面与主控制器之间的数据交换,实现关键数据的显示及记录,并通过界面自由操控车辆的动作。四个转向电机控制器的功能是接收来自主控制器的目标转角信号,并测量转向电机的旋转角度,进行闭环控制。同理四个轮毂电机控制器实现四个轮毂电机的闭环控制。各个控制器之间通过CAN总线进行连接,并自由扩展仪表显示模块、电池管理系统(Battery Management System,BMS)模块等。整个网络控制系统基于CAN总线构架,可靠性及实时性较高,扩展性及抗干扰能力强。
5 试验研究
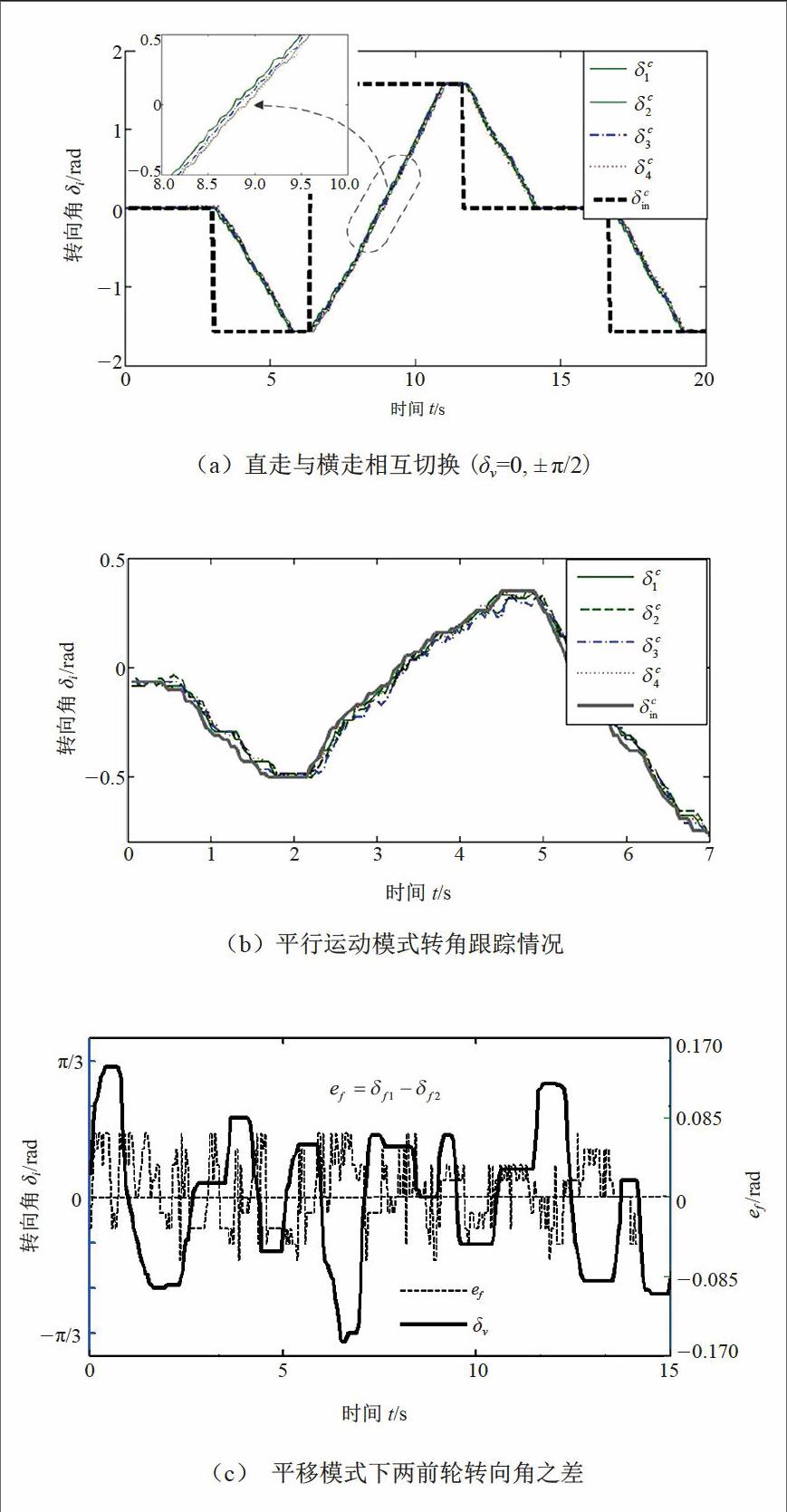
为了验证所提出的控制策略的有效性,在所设计开发的4WIS-4WID试验电动车辆上进行了试验。利用如图7所示的试验车辆分别对上述几种典型模式进行了试验并记录下数据,位置控制及速度控制均采用传统的PID控制。图8为试验数据,图中、、、分别为前左轮、前右轮、后左轮、后右轮转向角的实测值,为控制系统输入信号,由式(12)得出。
图8(a)为在停车情况下车辆直走与横走相互切换时(即或)各车轮转向角的测量值,可以看出四个车轮的转向角基本相等,具有较好的动态跟踪特性。图8(b)为平移模式下随机转动方向盘(值随机变化)时车轮运动情况,可以看出四个车轮较好地跟踪目标转角。图8(c)为平移模式下前两轮转角之差ef,可知两轮转角差在 ±4°以内,说明了平移模式下控制方法的有效性。图8(d)为前轮转向模式下的试验数据,表明了前轮参考转向角较好地跟踪了,两前轮转向角1、2在转向时不完全相等,与式(5)的计算结果基本吻合。图8(e)为全轮转向模式下各轮转向角数据(车速设置为 20 km/h),实测各车轮转向角与车速、转弯半径、参考转向角等密切相关,与式(1)的计算结果相符,车辆较平稳地完成了四轮转向运动。通过试验验证了所提出的控制策略与控制算法的有效性。
6 结论
(1)对所设计开发的4WIS-4WID电动车辆的结构和原理进行了介绍,该车辆运动灵活,具有前轮转向、后轮转向、四轮转向、平移、原地转向等多种运动模式。为了操控方便,对车俩电子操纵系统进行了设计,提出了一种基于CAN总线的车辆运动网络控制系统结构。
(2)对4WIS-4WID车辆在不同运动模式下各车轮的转向角及轮心线速度进行了运动学数学建模,为制定车辆运动控制策略提供了基础。
(3)提出了分布式“位置—速度”双环反馈控制策略,各车轮能同时对转角进行单独调节,在车辆的运动满足运动学要求的基础上具有较好的动态跟踪性能。最后通过实车试验验证了控制系统及控制策略的有效性。
参考文献(References):
胡国强. 汽车四轮转向系统转向特性的研究 [D]. 武汉:武汉理工大学,2012.
Hu Guoqiang. Study on Steering Character of Four-wheel Steering Vehicle [D]. Wuhan: Wuhan University of Technology,2012. (in Chinese)
乔羽. 汽车四轮转向的动力学特性与混杂控制研究 [D]. 天津:天津大学,2002.
Qiao Yu. Dynamics and Hybrid Control of Vehicle 4WS System [D]. Tianjin:Tianjin University,2002.(in Chinese)
李刚,宗长富,陈国迎,等. 线控四轮独立驱动轮毂电机电动车集成控制 [J]. 吉林大学学报(工学版),2012,42(4):796-802.
Li Gang,Zong Changfu,Chen Guoying,et al. Inte-grated Control for X-by-Wire Electric Vehicle with 4 In-dependently Driven In-wheel Motors [J]. Journal of Jilin University (Engineering and Technology Edition), 2012,42(4):796-802. (in Chinese)
FU Y,HE X,WANG S,et al. A Navigation Robot with Reconfigurable Chassis and Bionic Wheel[C]//Proc. IEEE International Conference on Robotics and Biomimetics, 2004:485-489.
Tu Xuyong. Robust Navigation Control and Headland Turning Optimization of Agricultural Vehicles [D]. Ames:Iowa State University,2013.
SOLEA R,FILIPESCU A,CERNEGA D. Lateral Motion Control of Four-Wheels Steering Vehicle Using a Sliding-Mode Controller [C]// Proceedings of the 29th Chinese Control Conference,Beijing,2010:3699-3703.
PERCY A,SPARK I,IBRAHIM Y. A Numerical Control Algorithm for Navigation of an Operator-Driven Snake Like Robot with 4WD-4WS Segments [J]. Robotica, 2011,29(3):471–482.
张培仁. CAN总线设计及分布式控制 [M]. 北京:清华大学出版社,2012.
Zhang Peiren. CAN Bus Design and Distributed Control [M]. Beijing:Tsinghua University Press,2012. (in Chinese)
米奇克,瓦伦托维兹. 汽车动力学[M]. 北京:清华大学出版社,2009.
MITSCHKE M,WALLENTOWITZ H. Vehicle Dynamics [M]. Beijing:Tsinghua University Press,2009. (in Chinese)
