一种钢丝绳变幅门座机水平补偿方式的探讨
2015-12-08李慎帅
李慎帅
(中船第九设计研究院工程有限公司,上海200063)
一种钢丝绳变幅门座机水平补偿方式的探讨
李慎帅
(中船第九设计研究院工程有限公司,上海200063)
摘要:介绍水平位移补偿系统的三种方式,探讨通过设置起升机构与变幅机构电气联锁来保证吊重位移水平性。通过分析改善后起重机的结构和机构,验证了此设想的可行性。
目前,门座起重机由于其灵活性、盲区小及造价低等优点,在船厂得到了广泛应用。尤其是单臂架型门座机,因其结构简单、造价相对低,需求量越来越大。笔者对近年来设计的一些单臂架俯仰变幅的船厂门座机的变幅过程中吊重水平补偿系统进行探讨。
1 常用水平补偿方式介绍
船厂门座机多为安装类型,变幅过程中吊重位移水平性是一项重要指标。当今船厂使用的单臂架门座机吊重水平位移补偿系统主要有以下三种方式:滑轮组补偿、杠杆滑轮(平衡滑轮)补偿和变幅卷筒补偿。
1.1 滑轮组补偿
滑轮组补偿工作原理为:在变幅过程中,利用起升绳总长度不变,而局部可变,自动补偿由于臂架摆动引起的吊重升降。如图1所示:当臂架从位置I摆动到位置I+1时,臂架头部升高△Hi,而与此同时,补偿滑轮组中心距从Li变化为Li+1。如果起升滑轮组倍率为mq,补偿滑轮组倍率为mb,则补偿滑轮组放出的绳长为:
臂架头部升高而引起吊重升高所需的绳长△Himq,那么只需△Limb=△Himq,即
式中,C是常数。这样便可实现I和I+1位置吊
重高度一致,从而实现吊重水平位移。实际设计中,一般只选2~3个幅度位置来确定mb/mq,故难以实现全程水平变化。
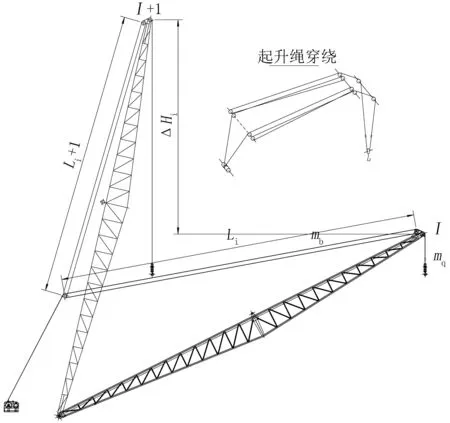
图1 滑轮组补偿方案示意图
一般情况下,△Hi远大于△Li。如图1所示方案中,△Li= Li-Li+1=65 400-52 200=13 200mm,△Hi=39 400 mm,△Hi/△Li=2.985≈3=mb/mq。mq取值不宜过大,否则臂架头部至人字架上部缠绕钢丝绳太多,经济性和钢丝绳受力都不好。此设计中mq=2,mb=6。
滑轮组补偿方案的主要优点是:构造简单,臂架只承受轴向力。缺点是:钢丝绳缠绕滑轮数目多,增加了钢丝绳长度,且弯曲次数太多,降低了钢丝绳寿命;吊重端mq取值不宜大,故一般只适用于小起重量起重机。
1.2 杠杆滑轮(导向滑轮)补偿
杠杆滑轮补偿原理与滑轮组补偿类似,也是利用变幅过程中起升绳总长度保持不变来实现吊重水平性,一般用于带有活配重的平衡系统中,较适用于大起重量、大幅度的门座机。如图2所示。
当臂架从位置I摆动到位置I+1时,则
由图2可知,此种形式优点是:结构简单;与滑轮组补偿形式相比,减少了钢丝绳缠绕量,改善了钢丝绳受力;mq取值可以较大,可用于大起重量。缺点是:与滑轮组补偿形式相比,臂架承受的弯矩加大,需加大中间截面;若要起到较好的补偿效果,图中导向滑轮B和卷筒C之间需足够大的距离,有时为了增加补偿效果,还要在机房上方加一组导向滑轮,增加B、C之间的钢丝绳长度。
1.3 变幅卷筒补偿
它与滑轮组补偿的区别是:变幅系统中增加了补偿卷筒,变幅卷筒与补偿卷筒机械联接,起升绳一端绕入补偿卷筒,当变幅卷筒收、放钢丝绳时,带动补偿卷筒放、收起升绳,以补偿起升吊钩在变幅过程中的水平落差。
补偿卷筒有直卷筒和锥卷筒两种形式。锥形卷筒采取分段式补偿的方式,补偿性能较好,但锥形卷筒加工困难,在维修更换起升绳后较难定位。所以目前大都采用直卷筒的方案。随着技术进步,现已将变幅卷筒与补偿卷筒合二为一,如图3所示。变幅机构利用放出或收进变幅钢丝绳使臂架俯仰动作,同时收进或者放出固定在卷筒上的起升钢丝绳,使吊重近似水平运动。
此种设计需要综合考虑起升机构与变幅机构的钢丝绳缠绕,使变幅绳与起升绳最大拉力尽量接近,或采用不同破断拉力的钢丝绳,使其选用相同直径的钢丝绳,从而共用绳槽。
这种形式机构布置紧凑,补偿钢丝绳(也就是起升钢丝绳)和变幅钢丝绳共用一个卷筒,钢丝绳直径相同,维护更方便。但变幅过程中,变幅卷筒上的补偿绳拉力可以辅助变幅卷筒旋转,降低了变幅功率。可用于大起重量。
2 起升、变幅机构电气联动水平补偿
这种形式只需在变幅过程中,使起升机构与变幅机构电气联锁:变幅机构动作时,起升机构以一定的速度随动,补偿由于幅度变化引起的吊重高度差,而起升机构可独立动作。此种补偿方式可近似实现吊重水平位移,理论上适用于各种柔>性变幅(钢丝绳变幅)和刚性变幅(齿轮齿条、螺杆螺母、液压推杆变幅)的水平补偿系统,可视为前三种水平补偿形式上的改进。

图2 杠杆滑轮补偿方案示意图

图3 变幅卷筒钢丝绳缠绕点布置图
以一台采用变幅卷筒补偿的门座机为例,阐述此种补偿方式。原设计起升、变幅机构的机构布置如图3、图4所示,主要参数为:起升载荷为120 t;起升速度为5 m/min;起升倍率为4;变幅范围为12 m~28 m;变幅速度为8 m/min。
改进后机构布置如图5所示。
2.1 起升随动验证
以臂架下铰点D为原点,取
式中,L起升是起升钢丝绳总长度;mq、mb、ma如图3,分别是臂架头部悬垂段起升绳根数、臂架头部至上转柱头部起升绳根数、上转柱头部至起升卷筒的起升绳根数;Ay是臂架头部相对于臂架下铰点高度;LAC、LCJ如图3,分别是臂架头部铰点A至上转柱头部铰点C之间的距离、C至起升卷筒卷入点J之间的距离。
变幅全程钢丝绳长度变化如表1所示。
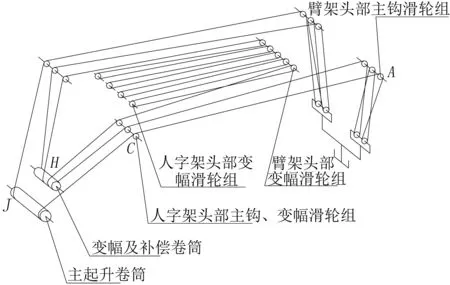
图4 变幅卷筒补偿钢丝绳穿绕示意图
图5 改进后起升、变幅机构钢丝绳穿绕示意图

幅度R/m282624222018161412L起升/m283.2296.8307.4315.8322.5327.7331.7334.5336.4
从表1可看出,当幅度逐渐变小时,若要保持吊重水平,则需逐渐放出起升绳;反之亦然。故可以设置成起升机构随动于变幅机构。
全程变幅时间为
式中,Rmax是臂架最大幅度;Rmin是臂架最小幅度。
则起升绳平均变化速度为
式中,L起升max是起升钢丝绳总长度最大值;L起升min是起升钢丝绳总长度最小值。
换算成吊重起升速度V起=V起绳/mq=3.325 m/minV额=5 m/min
可见不影响原起升机构。同时可得,以额定变幅速度变幅时,变幅机构变频器输出频率H额=50 Hz,起升机构做随动,只需同时起升机构变频器输出频率为
臂架收、放时,对应起升机构放、收钢丝绳,对应好电动机转向。
2.2 改进前后变幅功率比较
考虑滑轮组效率等因素,满载时,起升绳拉力F起=155 kN。
改进前,满载变幅过程中,钢丝绳拉力F变变化如表2所示。

表2 各幅度变幅钢丝绳拉力值F变Table 2 Tension values of luff wire rope at various range
变幅绳速V变绳=20 m/min,机构效率η=0.9,卷筒补偿形式电动机功率
故变幅电动机选择功率110kW。
改进后,带载变幅过程中,变幅钢丝绳最大拉力F变′=148kN,电动机功率P2=2F变′V变绳/η=109.6kW。
变幅功率略变大,但仍可选择变幅电动机功率110kW,电动机不变。
相对于改进前,此形式有以下优点:
(1)节省了钢丝绳和滑轮组:由图4、图5对比可知,改进后节省了2(LAC+LCH)段的钢丝绳;同时,臂架头部及人字架顶部省去了几组滑轮组,不仅节省了成本,还改善了结构本身的受力情况。
(2)起升、变幅卷筒取消机械关联,不需要再考虑起升、变幅钢丝绳直径相同,可根据需要设定钢丝绳缠绕方式。
(3)实现简单:只需通过电气编程控制实现即可。
3 结论
4种水平补偿形式在不同使用场合各有优劣,本文提供了一种水平补偿的可行形式,此形式可用于大多数原绳索补偿的门座机,相对于卷筒补偿,可能会略增加变幅功率,故需综合考虑技术可行性和经济可行性。
参考文献
[1]张质文,虞和谦,王金诺,等.起重机设计手册.北京:中国铁道出版社.
[2]程文明,郑益民,等. 门座起重机直卷筒补偿变幅系统的优化. 北京:起重运输机械,2003.
[3]刘剑波.单臂架门座起重机卷筒补偿变幅系统设计研究.北京:起重运输机械,2012.
编辑傅冬梅
关键词:俯仰臂架式门座机;联锁;水平性;可行性
DiscussiononaLevelCompensationMethodofWireRopeLuffingPortalCrane
LiShenshuai
Abstract:Three methods of level displacement compensation system for luffing jib portal crane have been described, electric interlock of lifting mechanism and luffing mechanism has been discussed to ensure load displacement level. Feasibiltiy of the design has been proved by analyzing upgraded structure and mechnism of crane.
Key words:luffing jib portal crane; interlock; level; feasibility
作者简介:李慎帅(1983—),男,工程师,主要从事机械设计。
收稿日期:2014—12—16
中图分类号:TG156.3
文献标志码:B
