基于模糊PID控制的直流电机调速系统
2015-12-07赵正黎于惠钧张发明谷雅琼
赵正黎,于惠钧,张发明,谷雅琼
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
基于模糊PID控制的直流电机调速系统
赵正黎,于惠钧,张发明,谷雅琼
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
针对传统直流调速不能有效克服非线性因素,难以满足某些特定场合对高精度、高性能的控制要求,提出了基于模糊PID控制的直流电机调速系统。介绍了模糊控制器的原理及特点,分析了模糊PID控制器的控制原理,并确定了模糊语言变量和隶属函数,制定了模糊规则和反模糊化方法,最后利用Matlab/ Simulink 对直流电机调速系统进行建模仿真。仿真结果表明:直流电机调速采用模糊PID控制比传统PID控制具有更好的控制精度、鲁棒性,并提高了电机动、静态性能。
直流电机;模糊PID控制;Matlab/Simulink
0 引言
直流电动机因具有较好的调速性能和较优的起动、制动性能,在电力拖动中得到了广泛应用,如被运用到矿井卷杨机、风电变桨控制中等。直流电动机一般采用传统PID来实现调速控制,这种方法的特点是结构简单、易于实现,但由于被控对象电机本身具有非线性特点,当电机拖动的负载突变或弹性变化时,传统的PID控制往往难以满足一些要求高精度、高性能的场合[1]。而模糊PID控制器的最大优点是不需要知道被控对象的精确数学模型,是利用专家的控制经验变成的控制规则来对系统进行控制,且可以根据控制参数的变化及时地调整控制策略,从而使控制对象的性能处于最佳状态。模糊 PID 控制器既具有模糊控制器的控制灵活、快速性好、适应性强的特点,又具有 PID 控制器控制精度高的特点。因此,本文提出在直流电机调速控制系统中采用模糊PID控制策略,并通过Matlab/ Simulink软件对该控制系统模型进行仿真分析,仿真结果表明该系统的控制性能指标明显优于采用传统PID控制,得出了该方法是有效、可行的。
1 模糊控制器的构成
模糊控制是一种基于规则的控制,即根据技术人员的控制经验或专家的知识来制定控制规则。模糊控制在一定程度上实现了将计算机推理代替人的思维和经验,能够满足一些复杂多变的、无法用精确数学描述的控制系统要求,是一种非线性的智能控制。
模糊控制器具有如下特点:容易控制和掌握,适应能力好,鲁棒性强。因此,其特别适合于非线性、时变及纯滞后系统的控制。其是模糊控制系统的核心,主要由4部分组成:模糊化、知识库、模糊推理以及反模糊化,如图1所示。
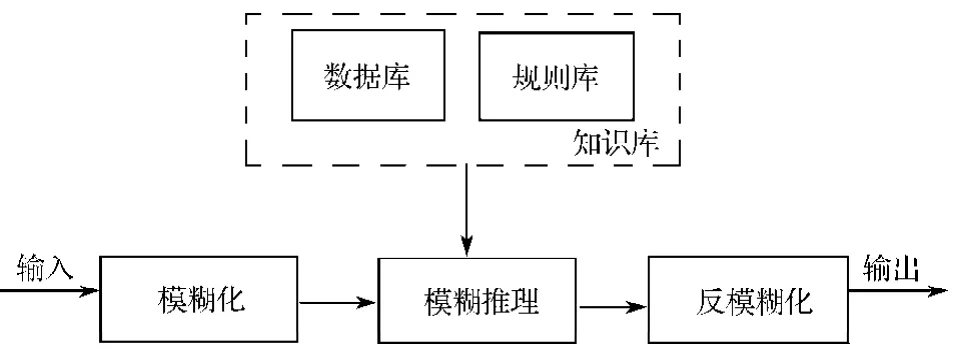
图1 模糊控制器的组成框图Fig. 1 The fuzzy controller block diagram
1)输入量模糊化
输入量模糊化的作用是,将测量得到的精确输入量转变为用通用语言值表示的某一限定序数即模糊变量。
2)知识库
知识库存储有关模糊控制器的一切知识,由数据库和模糊控制规则库构成,决定着控制器的性能[2]。数据库存储有关模糊化、模糊推理、反模糊化的相关知识,包括论域变换方法、输入输出变量的隶属函数定义、尺度变换因子及模糊推理和反模糊算法等。规则库是用一系列模糊条件描述的模糊控制规则,通常用关系词连接表示,如if-then(如果满足一组条件,则推出结论)等,这些规则主要是利用专家的控制知识或技术人员长期积累的经验来制定。
3)模糊推理
模糊推理是基于输入模糊量,由模糊逻辑中蕴含的关系及模糊控制规则模拟人类推理决策,并获得模糊控制量的过程。其是模糊控制器的核心。
4)反模糊化
通过模糊推理得到的数据是模糊量,而最后控制运算所要求的是清晰量。反模糊化可以看成是模糊化的反过程,即将模糊推理中得到的控制量采用某种精确化算法(如最大隶属度法)变成在论域范围的消晰量,再经尺度变换变成实际的控制量。
同场PK:将葛兰许和Bin 707放在一起PK是极其不公平的,这里不过是想比较一下两款酒的风格而已,因为Bin707近年价位越来越逼近葛兰许,是Penfolds众多红葡萄酒中最为强壮、饱满的代表。707充满力量,却不会让你觉得太霸道,浓郁的黑浆果香,入口复杂的香料香和更多层次的香气。葛兰许要深沉和沉稳很多,它是一款你得要品尝到第三口才能喝明白的年份,刚开始有很多你无法形容的感受。
2 模糊PID控制器的设计
直流电动机采用的模糊PID控制器结构如图2所示。该控制器为二维模糊控制器,将电动机实际的转速n与给定转速nref的偏差e以及偏差的变化率ec作为输入变量,经模糊化后的e和ec通过模糊控制规则来进行推理,再经解模糊得到参数,在线实时调整常规PID控制的参数,以实现对直流电机的转速控制[3]。
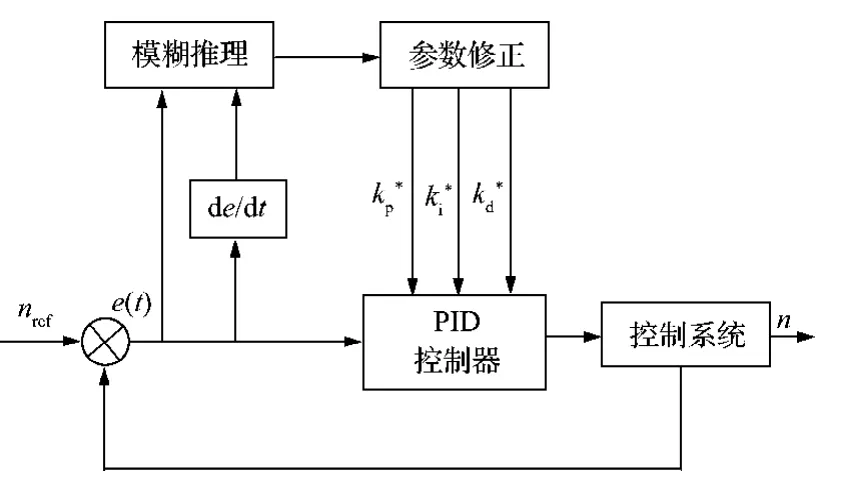
图2 模糊控制器结构图Fig. 2 Fuzzy controller structure diagram
2. 1 建立隶属度函数
本文建立了3个模糊控制器,都是以转速的偏差e和偏差的变化率ec作为输入。定义e 和ec模糊子集为{NB, NM, NS, ZO, PS, PM, PB},并将它们映射到论域[-6, 6]。将模糊控制器的输出分别作为常规PID 控制器的比例、积分、微分参数的修正值输入量,并定义其模糊子集为{NB, NM, NS, ZO, PS, PM, PB},将它们映射到论域[-10, 10]。模糊PID控制器中,比例kp控制器的具体设置如图3~6所示。积分ki、微分kd控制器的具体设置和比例kp控制器类似,在此不详细介绍。
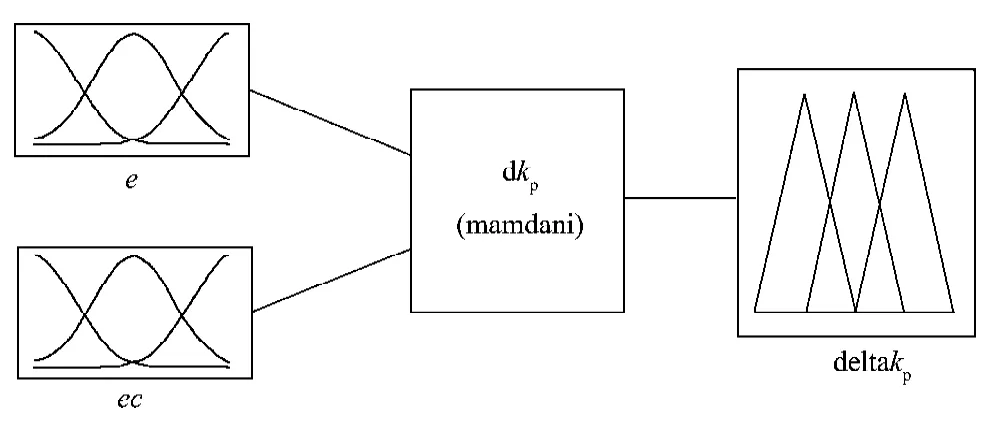
图3 kp控制器结构图Fig. 3 Structure of kpcontroller
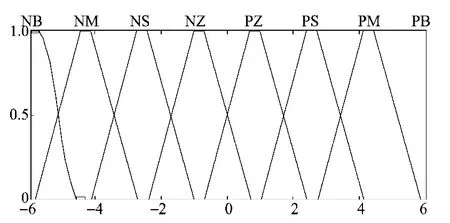
图4 输入e的隶属度函数Fig.4 The membership function of input e
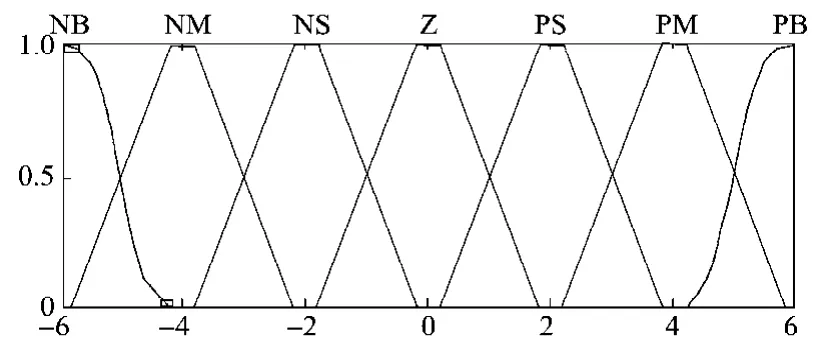
图5 输入ec的隶属度函数Fig. 5 The membership function of input ec
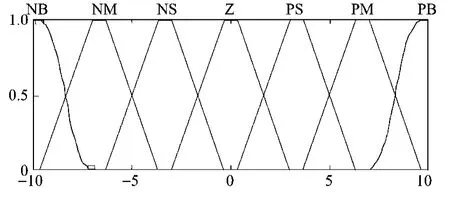
图6 输出kp的隶属度函数Fig. 6 The membership function of output kp
2.2 制定模糊规则
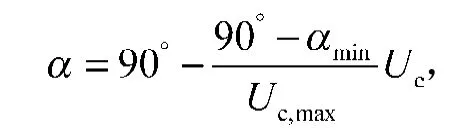
模糊控制规则是由自然语言变量所表达的模糊条件语句组成,它表征了控制目标和该领域专家的控制策略,是根据被控对象的行为特性和专家的控制经验编写的[4]。其优劣直接影响到系统性能的好坏。模糊规则的对应输入量偏差e以及偏差变化率ec的变化情况如表1~3所示。根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理来设计分数阶PID参数的模糊矩阵表,并将得到的参数代入下式中:
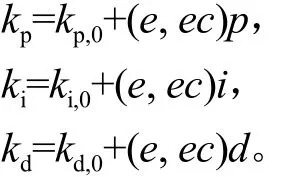
式中:kp,0, ki,0, kd,0为PID参数的初始设计值,由传统的PID控制器的参数整定方法设计;
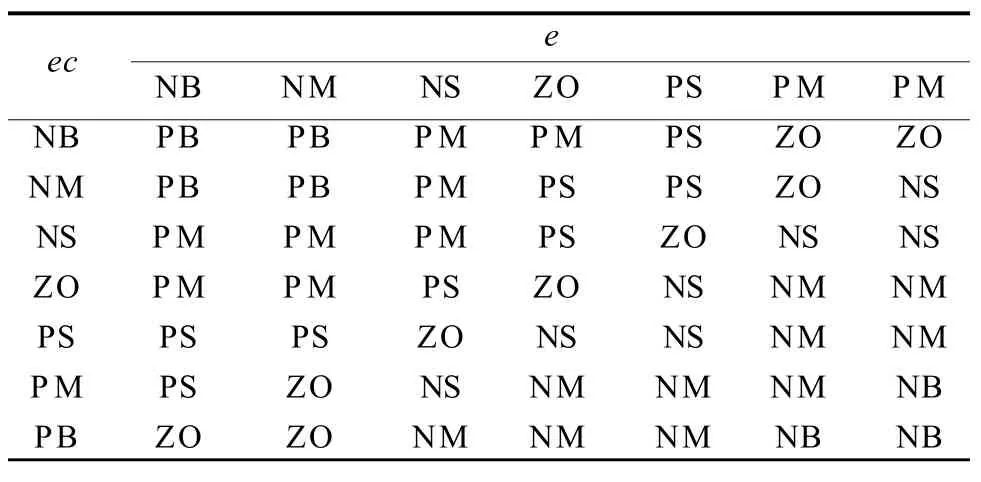
表1 kp控制规则表Table 1 kpcontrol rules
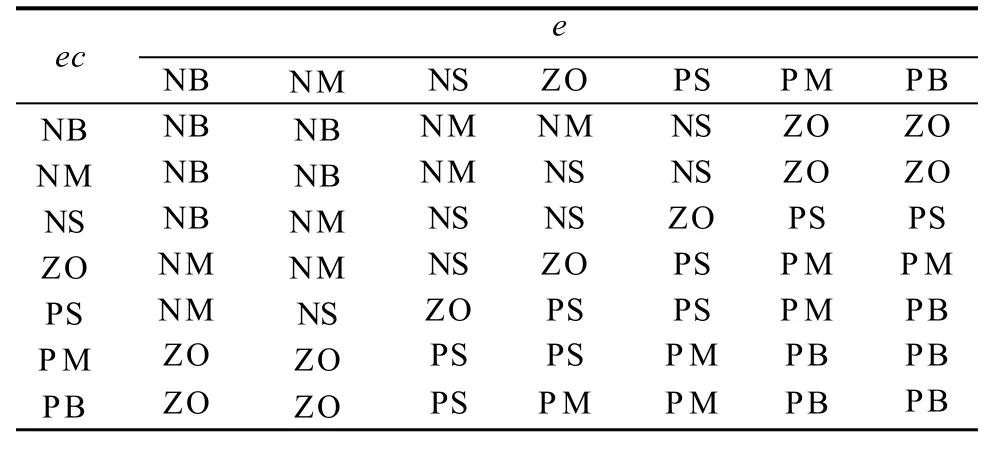
表2 ki控制规则表Table 2 kicontrol rules
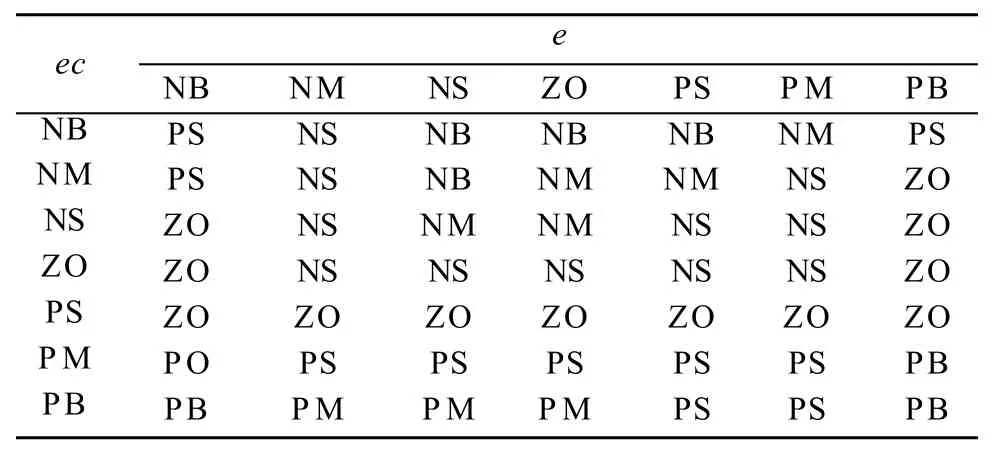
表3 kd控制规则表Table 3 kdcontrol rules
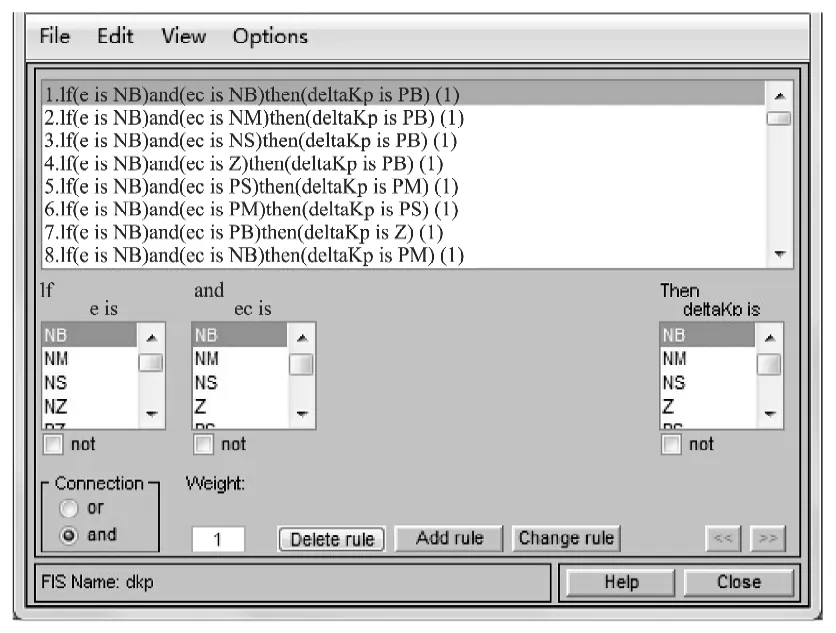
图7 规则编辑窗口Fig. 7 The rule editor window
2.3 反模糊化
为了得到确定值来驱动执行机构,模糊控制器还需要进行反模糊化处理,即将输出的语言变量转变成精确的数值。模糊PID控制器运用重心法[5]来对模糊子集进行反模糊化处理,即以控制作用论域上的点x u对控制作用模糊集的隶属度u(x)权系数进行加权平均,得到反模糊化结果。
3 仿真分析
3.1 直流电机双闭环PID调速仿真系统
本调速系统采用的是直流电机双闭环PID调速系统。该系统的特点是:电动机的转速和电流分别由2个独立的调节器控制,且转速调节器的输出就是电流调节器的给定,因此电流环能够随转速的偏差调节电动机电枢的电流[6]。直流电机双闭环PID调速仿真系统图如图8所示。
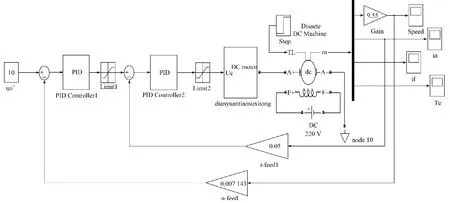
图8 直流电机双闭环PID调速仿真系统图Fig. 8 The simulation system of DC motor double closed loop PID speed control
3.2 模糊PID直流电机调速控制仿真系统
三相晶闸管整流电路的输出经平波电抗器L为直流电机的电枢提供电压,通过调整整流器的输出电压来实现直流电动机的调速,即通过调整触发器移相控制信号Uc来调节晶闸管控制角,从而改变整流器的输出电压[7]。将信号Uc作为移相控制模块的输入,其输出为触发器的控制角,移相控制信号Uc由常数模块设定,移相特性的数学表达式为
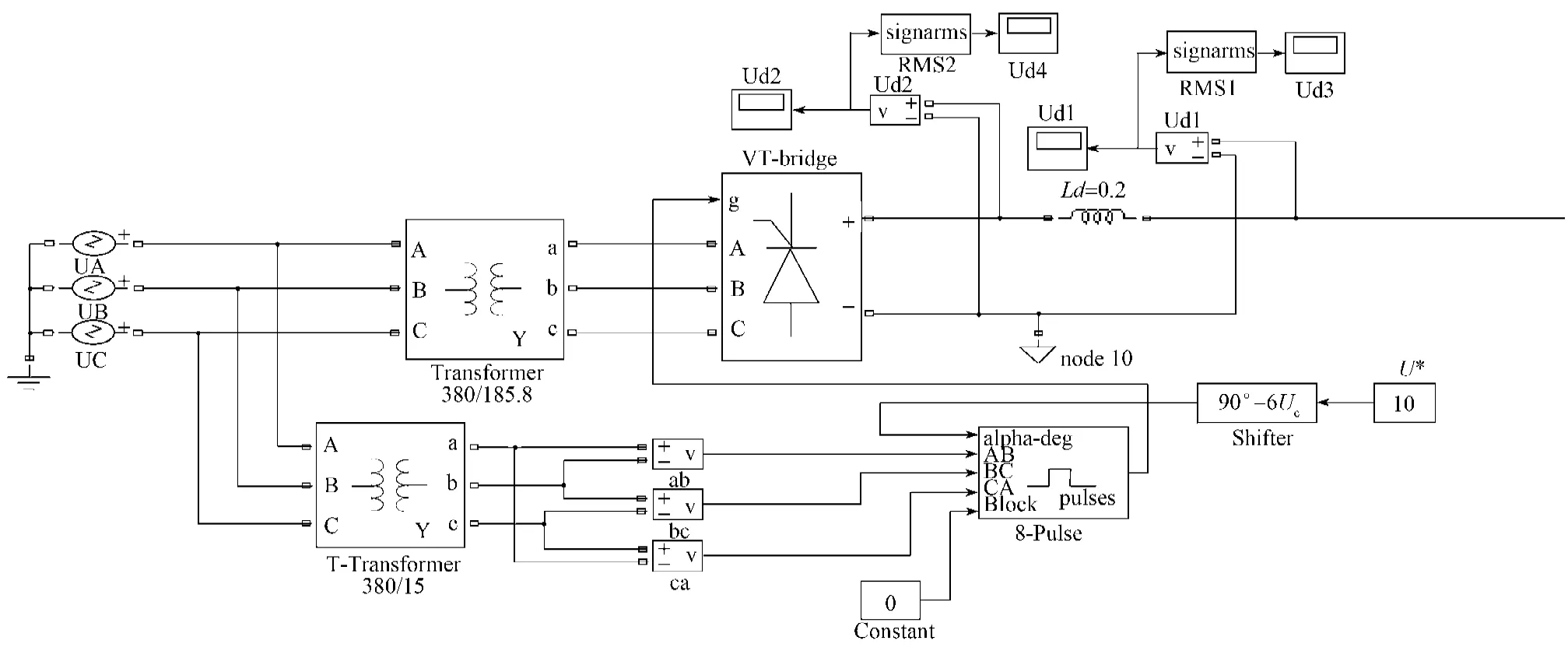
图9 电源调节子系统图Fig. 9 The power regulation subsystem
Uc,max为最大移相控制信号值,本模型取Uc,max=10 V。
电源调节子系统如图9所示。模糊PID控制器系统如图10所示。模糊控制器建立好后,搭建模糊PID直流电机调速控制仿真系统,如图11所示。
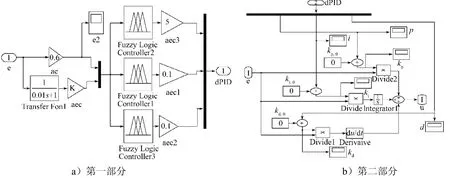
图10 模糊PID控制器系统Fig. 10 The fuzzy PID controller system
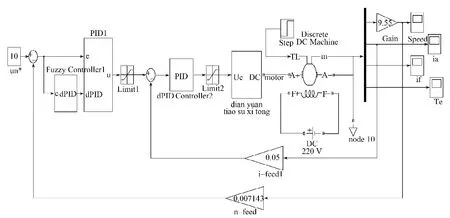
图11 模糊PID直流电机调速系统Fig. 11 Fuzzy PID DC motor speed control system
4 系统仿真与分析
电动机的额定参数为:Unom=220 V,Inom=150 A,nnom=1 400 r/min,Ra=0.21,GD2=22.5 N·m2。励磁电流If=1.5 A,励磁电压Uf=220 V。转速反馈系数为=0.007 1,电流反馈系数为=0.044 6。仿真时间设为2 s,1 s时加入干扰信号来检测系统抗干扰性能。将本模糊PID控制和常规PID控制进行比较,仿真结果如表4和图12所示。仿真结果表明本文所提的模糊PID控制方法的控制性能更为优越。
由仿真结果可知,常规PID控制的上升时间tr=0.18 s,峰值时间tm=0.21 s,调节时间ts=0.35 s,超调量%=7.9%;模糊PID控制的上升时间tr=0.18 s,峰值时间tm=0.19 s,调节时间ts=0.29 s,超调量%=3.9%;在1 s时引入干扰信号,模糊PID控制能够更快地恢复到稳定状态,这说明了本控制方法的抗干扰能力更强。
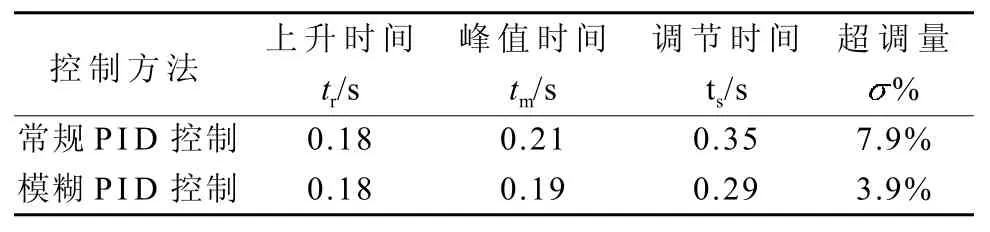
表4 2种控制方法的性能比较Table 4 Performance comparison of two kinds of control methods
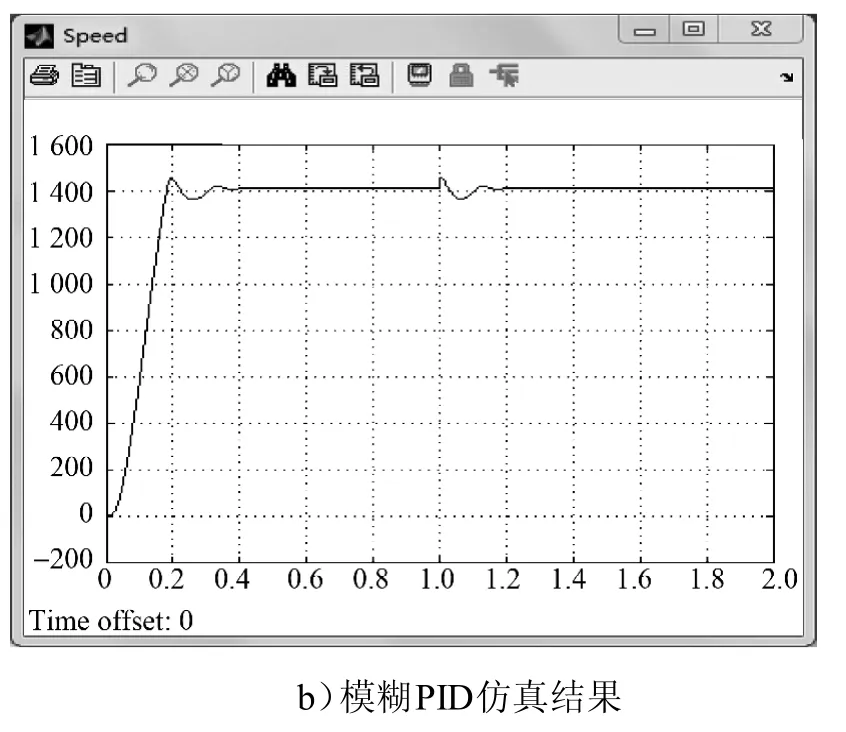
图12 仿真结果对比图Fig. 12 The contrast of simulation results
5 结语
本文将传统PID控制原理与模糊控制理论相结合,设计了参数自整定模糊PID控制器,并将其运用于直流电动机调速控制,利用Matlab/Simulink软件进行建模仿真分析,得出直流电动机调速采用参数自整定模糊PID控制比采用传统 PID 控制具有更好的控制精度,更强的抗干扰能力、鲁棒性,更优的动、静态性能,达到了比较理想的控制效果,说明了本方法的优越性。
[1] 陈兵伟,廖卫强. 应用变论域模糊PID的直流电机调速系统[J]. 集美大学学报,2011,16(3):207-211. Cheng Bingwei,Liao Weiqiang. Application of a Variable-Universe Fuzzy PID Controller for DC Motor Speed Control System[J]. Journal of Jimei University,2011,16 (3):207-211.
[2] 王 葳,张永科,刘鹏鹏,等. 无刷直流电机模糊PID控制系统研究与仿真[J]. 计算机仿真,2012,29(4):196-199. Wang Wei,Zhang Yongke,Liu Pengpeng,et al. Study and Simulation of Fuzzy PID Control System of BLDCM [J]. Computer Simulation,2012,29(4):196-199.
[3] 范子荣,张友鹏. 基于Matlab的自适应模糊PID控制器的设计[J]. 电气传动自动化,2006,28(3) :11-13. Fan Zirong,Zhang Youpeng. Design of a Self-Adaptive Fuzzy PID Controller with Matlab[J]. Electric Drive Automation,2006,28(3) :11-13.
[4] 殷云华,樊水康,陈闵鄂. 自适应模糊PID控制器设计与仿真[J]. 火力与指挥控制,2008,33(7):96-99. Yin Yunhua,Fan Shuikang,Chen Min’e. The Design and Simulation of Adaptive Fuzzy PID Controller[J]. Fire and Command Control ,2008,33(7):96-99
[5] 姚绪梁,赵云凯,尹国慧. 基于模糊控制器的直流无刷电动机控制[J]. 控制工程,2009,16(3):346-349. Yao Xuliang,Zhao Yunkai,Yin Guohui. Control for Brushless DC Motor Based on Fuzzy Controller[J]. Control Engineering of China,2009,16(3) :346-349.
[6] 支长义,王瑞玲,唐道奎,等. 无刷直流电动机模糊自适应PID控制策略研究[J]. 电力系统保护与控制,2010,38(8):35-37. Zhi Changyi,Wang Ruiling,Tang Daokui,et al. Study on Fuzzy Self-Adaptive PID Control Strategy for Brushless DC Motor[J]. Power System Protection and Control,2010,38(8):35-37.
[7] 杨 鹏,王 飞,贾春奇,等. 无刷直流电机闭环控制仿真系统的研究[J]. 微电机,2013,46(11):76-78. Yang Peng,Wang Fei,Jia Chunqi,et al. Tentative Research on Emulation of Closed Loop Control System for BLDC Motor[J]. Micromotors,2013,46(11):76-78.
(责任编辑:邓 彬)
DC Motor Speed Control System Based on Fuzzy PID Control
Zhao Zhengli,Yu Huijun,Zhang Faming,Gu Yaqiong
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
The traditional DC speed regulation can not overcome nonlinear factors and is hard to meet certain occasions control requirements of high precision and high performance puts forward, the DC motor speed control system based on fuzzy PID control . Introdues the theory and characteristics of fuzzy control, analyzes the control principle of the fuzzy PID controller, determines variables of fuzzy anguage and sub-ordinative functions, and stipulates the methods of fuzzy rules and inverse fuzzy. Finally, the modeling and simulation are made with Matlab/Simulink, the result shows that the DC motor speed control applying fuzzy PID control has better control precision and robustness than traditional methods,and it also improves dynamic and static performance of electrical motor.
DC motor;fuzzy PID control ;Matlab/Simulink
TM33
A
1673-9833(2015)02-0038-06
10.3969/j.issn.1673-9833.2015.02.007
2014-12-23
基金简目:湖南省自然科学基金资助项目(13JJ9017)
赵正黎(1989-),男,广西河池人,湖南工业大学硕士生,主要研究方向为复杂机电系统的信息集成和协调控制,E-mail:824775723@qq.com
于惠钧(1975-),男,河南驻马店人,湖南工业大学副教授,主要从事控制科学与工程方面的研究与教学,E-mail:arejunyu@foxmail.com
