一种电阻触摸屏坐标定位方法
2015-12-07罗树英
李 飞,凌 云,陈 欢,罗树英
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
一种电阻触摸屏坐标定位方法
李 飞,凌 云,陈 欢,罗树英
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
提出了一种五线电阻触摸屏的坐标定位方法。五线电阻触摸屏从下导电层的4个角施加恒定电流流入,所有电流从上导电层流出。定位触按坐标时,先设置初始预设点,然后测量触按点的实际对角线电压,采用反向搜索定位法,计算预设点和搜索点的理论对角线电压,取误差最小的理论对角线电压点为新预设点,反复搜索,最终逼近触按点。该方法解决了在不加补偿电极的情况下,五线电阻触摸屏的非线性方程求解和失真校正问题,可以使五线电阻触摸屏的边框变窄,拓宽了五线电阻触摸屏在小屏幕下的应用范围。
电阻触摸屏;坐标;反向搜索;非线性
0 引言
目前,操作技术比较成熟的触摸屏主要有红外线触摸屏、表面声波触摸屏、电容式触摸屏、电阻式触摸屏等,其中,电阻式触摸屏应用相对较多。传统的四线电阻触摸屏定位坐标时,必须保证其上、下两层导电层的导电均匀性不被破坏[1]。然而,上导电层的经常触按区域容易被划伤而断裂,导致触摸屏长期处于湿度很大或者温度较高的环境下,从而使得上导电层发生氧化,增大了电阻的阻值,最终破坏其导电均匀性,使得坐标计算出现误差,即出现“漂移”现象[2-3]。
五线电阻触摸屏的上导电层只用来作为引出端电极,不必要求其具备均匀导电性,故即使其因为形变发生破损,也不会使电阻屏产生“漂移”[4]。传统五线电阻触摸屏的电极为电阻网络补偿电极,分布在触摸屏四周,其作用是使触摸屏x,y轴方向电压梯度呈线性,便于坐标测量[5-6]。传统五线电阻触摸屏因有补偿电极,不能将屏幕与周边区域之间范围距离设置太窄,这样其使用范围也会受到影响。
在不加补偿电极的情况下,五线电阻触摸屏存在非线性方程求解和失真校正等问题。因此,本文拟提出一种五线电阻式触摸屏坐标定位方法,以解决这些问题。
1 触摸屏的工作原理
五线电阻触摸屏的结构如图1所示。触摸屏的下导电层为电压密集分布的部位,要求电阻均匀分布,四周由A,B,C,D 4条连接线引出;其上导电层为用于检测电压的部位,它对电阻均匀性没有过多的要求,由一根连接线E引出。
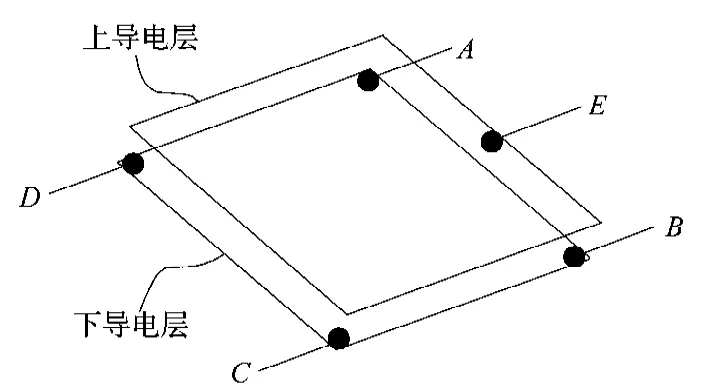
图1 五线电阻触摸屏结构Fig. 1 The structure of the five-wire resistive touch screen
五线电阻触摸屏有触按点后的电阻分布如图2所示。图中,P点为触按点,当P点在屏幕中的位置发生改变时,P点与4个角A,B,C,D之间的距离相应发生变化,P点与4个角A,B,C,D间的等效电阻RA, RB,RC,RD也随之发生变化,即距离变短,对应等效电阻变小。
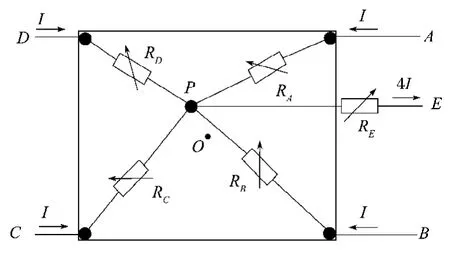
图2 五线电阻触摸屏有触按点后的电阻分布Fig. 2 Resistance distribution after the five-wire resistive touch screen having the touch point
从下导电层的A,B,C,D 4点增添恒定电流I流入,所有电流从上导电层E处流出,触按P点,两个对角线之间的电压差是:

图2中的RE包括触按点接触电阻和上导电层等效电阻,其大小不影响对角线电压UAC和UBD。
以图2中的O点为五线电阻触摸屏的原点,4个角的坐标为A(-m,n),B(-m,-n),C(m,-n),D(m,n),P点的坐标为(u,v),则两个对角线之间的电压差为:

假设等效电阻RA,RB,RC,RD的大小与P点和4个角A,B,C,D间的距离成正比例关系,则式(3)中的系数KA,KB,KC,KD为常数。当P点坐标待定时,测量电压UAC,UBD,代入式(3)的两个表达式中,则P点坐标(u,v)可以求出。
系数KA,KB,KC,KD值的测量方法如下:
1)触摸C点,并测量电压UAC,按照公式(4)计算与校正系数KA,

2)触摸A点,并测量电压UAC,按照公式(5)计算与校正系数KC,

3)触摸D点,并测量电压UBD,按照公式(6)计算与校正系数KB,

4)触摸B点,并测量电压UBD,按照公式(7)计算与校正系数KD,

2 触摸屏的非线性失真校正方法
假设等效电阻RA,RB,RC,RD的大小与P点和4个角A,B,C,D之间的距离成正比关系时,按照公式(3)计算出来的五线电阻触摸屏坐标会产生如图3所示的枕形失真[4]。造成该现象的原因,是等效电阻RA, RB,RC,RD的大小与触按点P和4个角A,B,C,D之间的距离不是正比例关系。
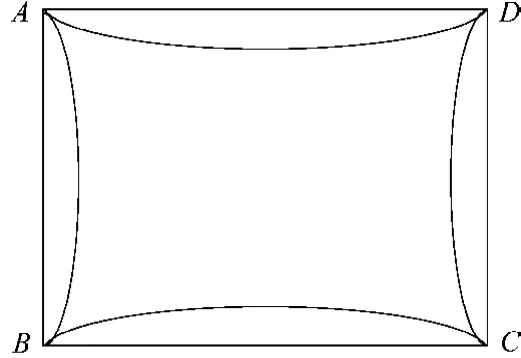
图3 触摸屏坐标枕形失真Fig. 3 Pincushion distortion of touch screen coordinates
只考虑左右枕形失真时,线性平面左右边线上的点与失真平面中二次曲线上的点有一一对应关系,如图4所示,图中的线性平面直线段DC上的点(m,0)与失真平面二次曲线DGC上的点对应。
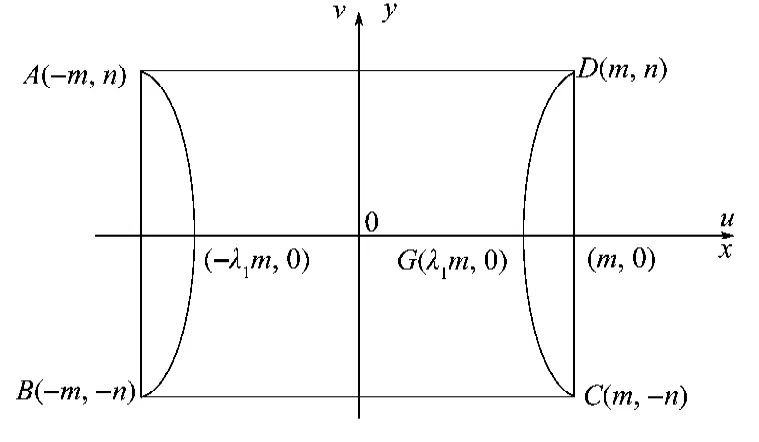
图4 触摸屏坐标左右枕形失真Fig. 4 Side pincushion distortion of touch screen coordinates
经测量验证,二次曲线DGC可以如下公式描述:

式中,

或者

同样地,只考虑上下失真时,线性平面上下边线上的点与失真平面中二次曲线上的点有一一对应关系,如图5所示。图中,线性平面直线段AD上的点(0, n)与失真平面二次曲线AHD上的点对应。
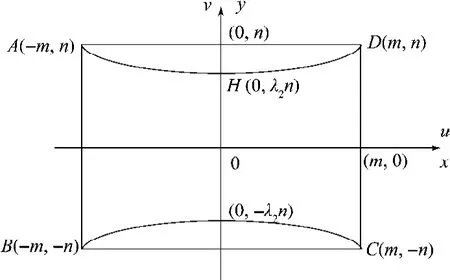
图5 触摸屏坐标上下枕形失真Fig. 5 Upper and lower pincushion distortion of touch screen coordinates
二次曲线AHD可以用如下表达式描述:

式中,

线性平面的上边线上的点为(x,n)时,与之相对应的失真平面上的点为(x,v),其中,

上下边线上的失真度[7]最大,并且对称。当线性平面上的点不在上下边线上时,直线(x,y1) 与之相对应的失真平面上的点为(x,v),其中y1为小于等于n的常数,有

或者

综合考虑上下失真与左右失真的情形,当线性平面上有点(x, y)时,与之相对应的失真平面上的点为(u, v),则有
3 触摸屏坐标定位方法
由于式(3)是非线性方程,当五线电阻触摸屏有触按点,测量出对角线电压UAC,UBD后,无法采用解析的方法求出触按点坐标(u,v);同样地,由于式(16)是非线性方程,当已知失真平面上的点(u, v)时,无法采用解析的方法求出线性平面上的点(x, y)。对两种方法进行比较可知,采用五线电阻式触摸屏反向搜索定位方法更方便。
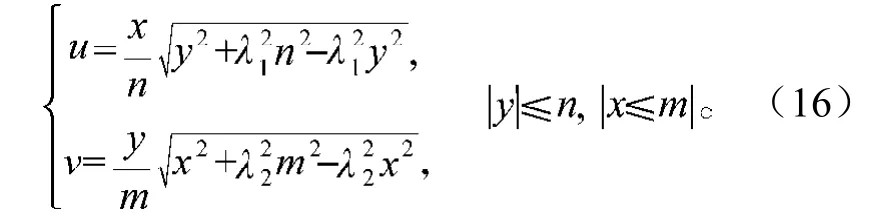
五线电阻触摸屏坐标反向搜索定位方法的搜索流程如图6所示。
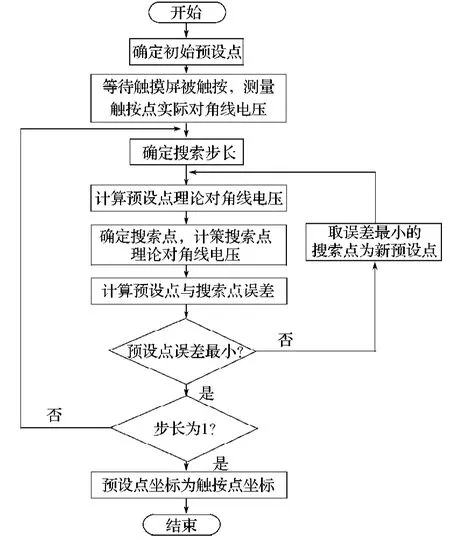
图6 五线电阻触摸屏坐标反向搜索定位法搜索流程Fig. 6 Searching flow of the coordinate revers search positioning method of five-wire resistive touch screen
其具体步骤如下:
1)确定五线电阻触摸屏的中心点为坐标原点,4个角的坐标为A(-m, n),B(-m, -n),C(m, -n),D(m, n),设置初始预设点Q0(x, y)。
2)等待触摸屏被触按,测量实际触按点的对角线电压UAC和UBD。
3)确定搜索步长l 。采用变步长搜索方法时,步长l先取大值,后取小值,最后取步长l =1;采用固定步长搜索方法时,取步长l =1。
4)假设是在预设点Q0(x, y)触按,按照公式(3)~(7),计算将预设点Q0(x, y)作为触按点的理论对角线电压UAC0和UBD0。
5)取预设点Q0(x, y)上、下、左、右相邻的4个搜索点,分别计算将4个搜索点作为触按点的理论对角线电压UAC1,UBD1,UAC2,UBD2,UAC3,UBD3,UAC4,UBD4。
6)计算分别将预设点Q0和4个搜索点Q1,Q2,Q3,
Q4作为触按点时,触按点的理论对角线电压与实际触按点对角线电压之间的误差。
7)如果误差最小,本轮搜索结束,转到步骤8);否则选择方差最小的搜索点为新的预设点Q0(x, y),返回步骤4)。
8)如果搜索步长l不等于1,返回步骤3);否则,搜索过程结束,确定预设点Q0(x, y)的坐标即为实际触按点坐标。
假设触按点位置为P(4, 2),测量得到的对角线电压实际值为UAC,UBD。反向搜索定位前,先在屏幕上初始设置一个预设点,例如图7a的点Q(0, 0);计算Q点的对角线电压理论值,同时分别计算Q点上、下、左、右相邻4点(0, 1),(0, -1),(-1, 0),(1, 0)的对角线电压理论值;将5个点的对角线电压理论值与触按点P(4, 2)测量得到的对角线电压实际值分别进行比较,选择平方差最小的一个点为新的预设点,为图7b中的点Q(1, 0);然后分别计算Q(1, 0)以及相邻4点(1, 1),(1, -1),(0, 0),(2, 0)的对角线电压理论值;将5个点的对角线电压理论值与触按点P(4, 2)测量得到的对角线电压实际值再分别进行比较,选择平方差最小的一个点为新的预设点,为图7c中的点Q(2, 0);照此周而复始进行反向搜索,点Q按照(0, 0),(1, 0),(2, 0),(3, 0),(3, 1),(4, 1),(4, 2)的顺序逐次逼近触按点P(4, 2)。搜索过程中,当预设点Q不再向上、下、左、右变化时,则认为此预设点Q已经最为逼近(或处于)触按点P,搜索过程结束。图7 所示为触按点P(4, 2)的五线电阻触摸屏坐标反向搜索定位法搜索进程。图7所示例子中,搜索步长为1,搜索用6步,确认用1步,整个过程共需7步。
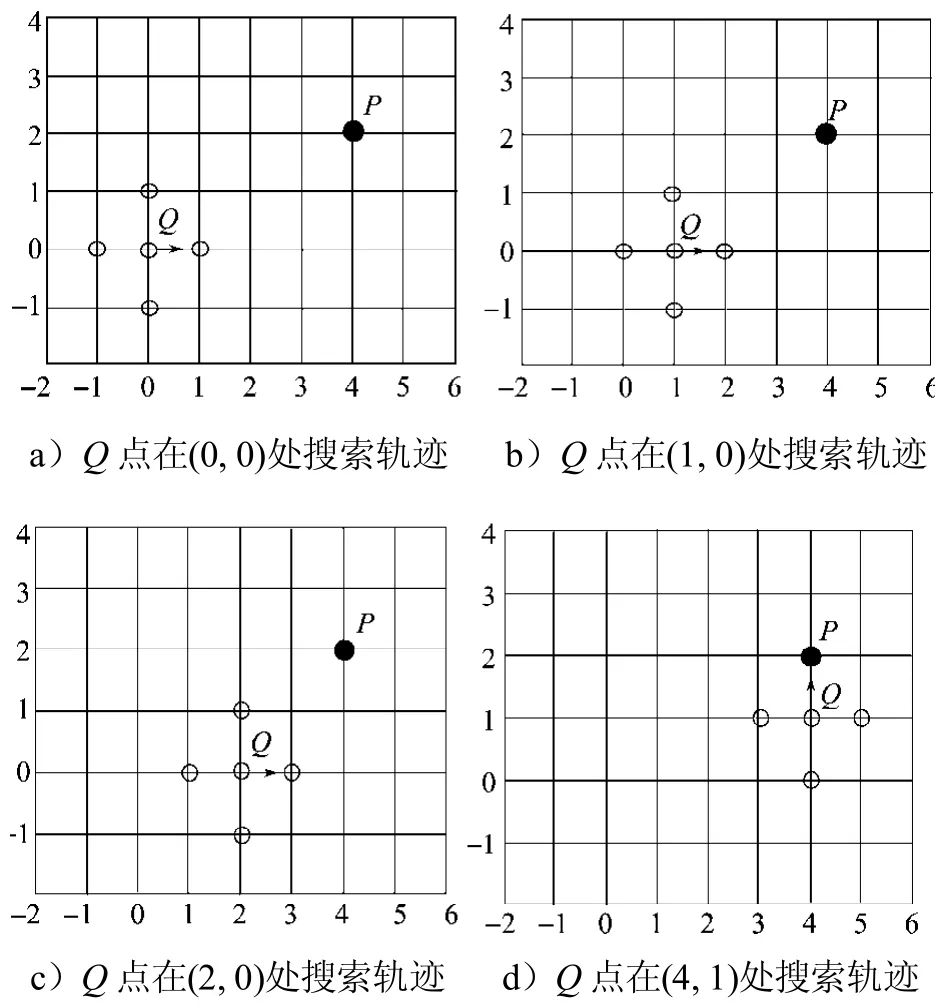
图7 五线电阻触摸屏坐标反向搜索定位法搜索进程Fig. 7 The search procedure of the coordinate revers search positioning method of five-wire resistive touch screen
4 测试结果
本文采取的测试环境为:群创4.3寸五线电阻触摸屏AT043TN24。
触摸屏的点具有一定的离散型,为了减小误差,实验中选取了多个触按点数据。同时,为了方便计算,预设点坐标统一设为(0, 0)。在调试中结合 ARM开发工具ADS,通过采取AXD调试器中设置断点跟踪变量的方法进行数据采集。尽可能先固定一个坐标的数值来采集触摸点坐标的大小。选取触摸点的位置为(160, 120),以触摸屏y轴方向对触摸屏进行触摸,改变x坐标的大小采集数据,触按屏幕采集数据的坐标曲线如图8a所示。同理可得,固定x坐标的曲线如图8b所示。
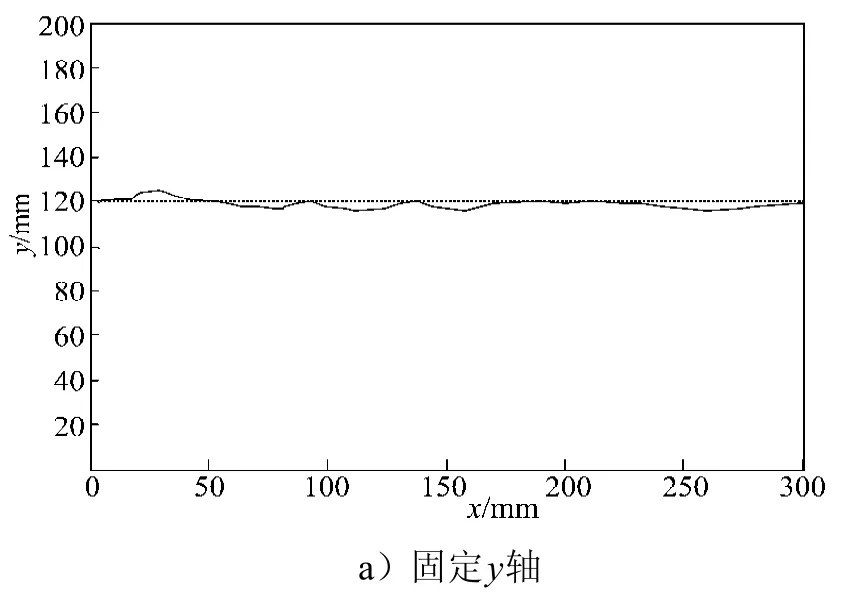
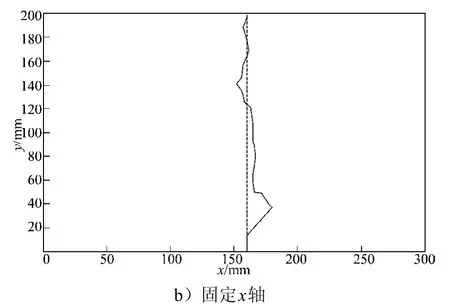
图8 固定y轴或者x轴时的触摸点坐标曲线Fig. 8 The touch point coordinate curves with fixing y or x axis
当触按点位置与初始预设点位置相差较远,且步长为1时,运用五线电阻触摸屏反向坐标定位方法的搜索时间可能会很长。如触按点为(160, 120)时,预设点(0, 0)共需281步计算才能逼近触按点。采用变步长方法可以减少计算量。变步长方法[8]的步长变化的轮数以及每一轮的步长值可以合理选择,但必须先取大步长值,后取小步长值,最后一轮的步长选择为1。
实验中,选择多个样本,将使用反向搜索坐标定位方法与不使用该方法所得到的实验结果进行对比,如表1所示。
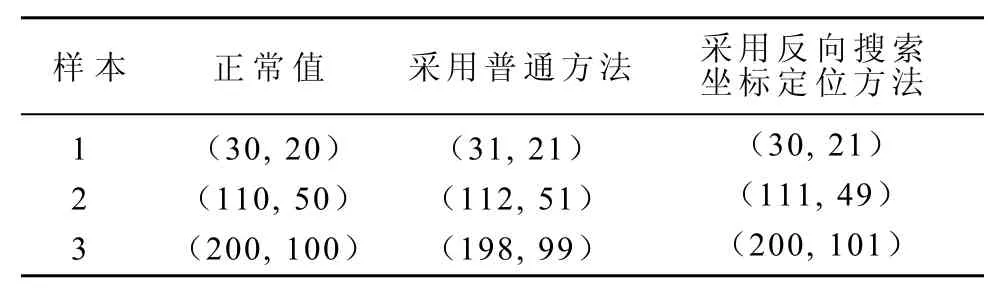
表1 实验结果Table 1 The experimental results
分析表1中的数据可知,选取的3组样本数据,相对而言,采用反向搜索坐标定位方法所得数据更接近真实值,失真度更小。
5 结语
五线电阻触摸屏采用反向搜索定位法定位坐标,解决了在不加补偿电极的情况下,五线电阻触摸屏的非线性方程求解和失真校正问题,可以使五线电阻触摸屏边框变窄,拓宽了五线电阻触摸屏在小屏幕下的应用范围。
[1] 蔡红娟,高恒强,蔡 苗. 电阻式触摸屏校准算法的优化[J]. 制造业自动化,2012,34(7):21-23. Cai Hongjuan,Gao Hengqiang,Cai Miao. The Optimization to Calibration Algorithm of Resistive Touch Screen[J]. Manufacturing Automation,2012,34(7):21-23.
[2] 王党利,马保吉,宁生科. 电阻触摸屏误差分析及加速度模型的数据处理[J]. 陕西理工学院学报:自然科学版,2009,25(4):15-19. Wang Dangli, Ma Baoji, Ning Shengke. Error Analysis of Resistance Touch Screen and the Data Processing Based on Acceleration Model[J]. Journal of Shanxi University of Technology:Natural Science Edition,2009,25(4):15-19.
[3] 谭翠兰,何立言. 电阻式触摸屏的硬件接口电路与校准算法[J]. 江汉大学学报:自然科学版,2011,39(2):19-21. Tan Cuilan, He Liyan. Hardware Interface Circuit and Calibratance Algorithm for Resistance Touch Screen[J]. Journal of Jianghan University:Natural Science Edition,2011,39(2):19-21.
[4] 刘忠安,徐卫东,权 蕾,等. 高可靠电阻式触摸屏的研制[J]. 光电子技术,2009,29(4):226-230. Liu Zhongan, Xu Weidong,Quan Lei, et al. Development of the High Reliability Resistive Touch Panel[J]. Optoelectronic Technology,2009,29(4):226-230.
[5]刘荣林,刘亚坤,武 华,等. 基于ARM嵌入式触摸屏的设计与研究[J]. 内蒙古大学学报:自然科学版,2009,40(6):708-711. Liu Ronglin,Liu Yakun,Wu Hua,et al. Design of the Embedded Touch-Screen Based on ARM[J]. Journal of Inner Mongolia University,2009,40(6):708-711.
[6] 罗勇刚,夏定纯. 电阻式触摸屏的校准与应用研究[J]. 武汉科技学院学报,2007,20(12):47-49. Luo Yonggang,Xia Dingchun. Research on Justified and Application About Resistive Touchscreen[J]. Journal of Wuhan University of Science and Engineering,2007,20 (12):47-49.
[7] 彭 强,邓 云,杨天武,等. 一种通用的视频传输端到端失真度估算方法[J]. 中国图象图形学报,2006,11 (6):792-797. Peng Qiang,Deng Yun,Yang Tianwu,et al. A Novel General End-to-End Distortion Estimation Model for Video Transmission[J]. Journal of Image and Graphics,2006,11(6):792-797.
[8] 张龙杰,谢晓方. 通用变步长弹道仿真方法研究[J]. 弹道学报,2011(2):42-46. Zhang Longjie,Xie Xiaofang. Research on General Variable Step-Size Ballistic Simulation Method[J]. Journal of Ballistics,2011(2):42-46.
(责任编辑:廖友媛)
A Resistive Touch Screen Coordinate Positioning Method
Li Fei,Ling Yun,Chen Huan,Luo Shuying
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
Puts forward a method on positioning coordinate of five-wire resistive touch screen. The constant current is applied to inflow from four corners of lower conducting layer of the resistive touch screen and all current outflows from upper conducting layer. Sets the initial preset point first when the touch coordinate is positioned, then measures the actual diagonal voltage of the touch point, and uses the reverse-search positioning method to calculate the theoretical diagonalvoltage of the preset and searching point. Takes the theoretical minimum error diagonal voltage point as new preset point and searches repeatedly to get the final approach touch point. The method solves the problems of nonlinear equations solution and distortion calibration for five-wire resistive touch screen without the compensation electrode. It makes the touch screen frame narrower and broadens the five-wire resistive touch screen application range in small screen.
resistive touch screen;coordinate;reverse-search;nonlinear
TN873
A
1673-9833(2015)02-0074-05
10.3969/j.issn.1673-9833.2015.02.014
2015-01-20
湖南省自然科学基金资助项目(13JJ9016)
李 飞(1988-),男,湖南岳阳人,湖南工业大学硕士生,主要研究方向为复杂机电系统的信息集成和协调控制,E-mail:443824759@qq.com
