星载红外探测器调焦机构设计与分析
2015-12-07浦前帅翟岩文大化梅贵
浦前帅,翟岩,文大化,梅贵
(中国科学院长春光学精密机械与物理研究所,长春 130033)
星载红外探测器可昼夜全天候获取地面信息,提供清晰快捷的红外图像,在军事侦察技术中具有不可替代的作用。星载红外探测器在发射过程及工作时所处的环境条件(如冲击、振动、压力、温度等)非常复杂,为保证在复杂环境条件下红外探测器的成像质量,要求红外探测器不但要有优良的结构性能,而且应具有良好的环境适应性能,尤其是对温度、压力变化的适应性[1]。由于环境条件的变化,红外探测器的焦面将产生不同程度的偏移,为保证红外探测器在复杂环境条件下的成像质量,需对红外探测器像面的变化加以校正,因此设计一套补偿红外探测器像面偏离的调焦机构是十分必要的[2-4]。
1 调焦机构的工作原理
不同光学系统其调焦方式不同,常用的调焦方式主要有镜组移动式、焦面反射镜移动式和焦平面移动式几种[5],根据红外探测器的结构形式、调焦精度及使用环境条件,本文选择镜组移动的调焦方式,即通过沿光轴移动调焦镜组改变焦面位置来达到调焦的目的。
在实际操作过程当中,首先由地面遥控站分析探测器下传的实际图像质量,判断出调焦镜组偏离理想位置的距离和方向,然后将比较差值通过遥控指令传给功率驱动器,以控制调焦电机工作,调焦电机输出的转矩经过齿轮和蜗轮蜗杆传动机构传递给滚珠丝杠,移动调焦镜组,使景物像清晰地成在相机的焦平面上[6,7]。图1所示为调焦原理框图。
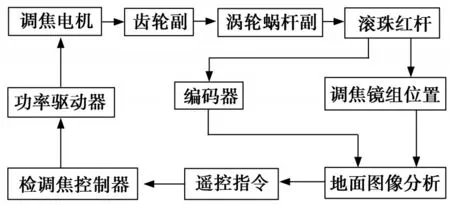
图1 调焦原理框图
2 调焦机构设计
2.1 调焦机构主要性能指标
项目总体对调焦机构提出的主要性能指标如下:
(1)安装空间为一个不规则空间形状,主要尺寸如图2所示;
(2)重量不超过630g;
(3)一阶谐振频率大于100Hz;
(4)调焦范围±2mm,调焦精度0.06mm;
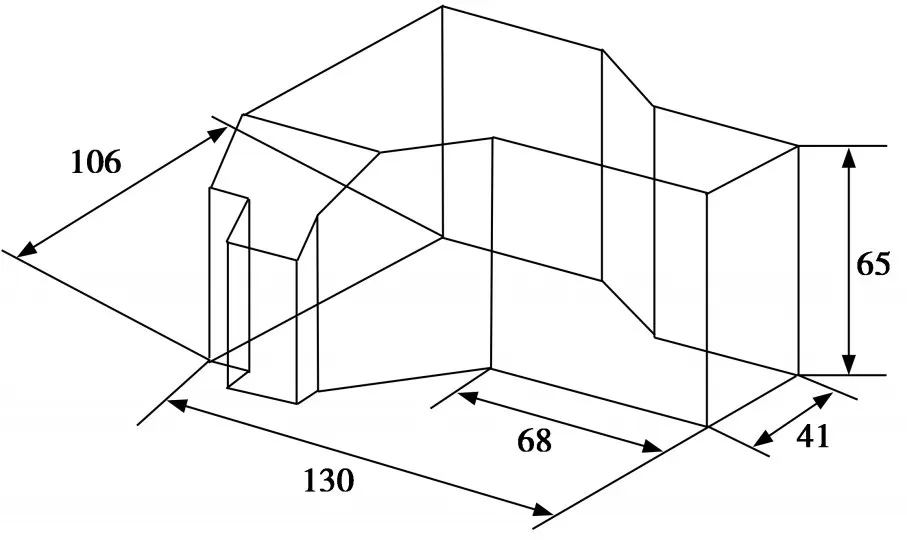
图2 调焦机构安装空间尺寸
2.2 调焦机构方案设计
按照总体对调焦机构提出的空间尺寸的要求,设计了如图3所示的调焦机构:主要由调焦电机、齿轮、蜗轮蜗杆、滚珠丝杠、编码器、调焦镜组和导轨滑块组成。调焦电机借助减速装置将动力传递给滚珠丝杠,滚珠丝杠实现了把步进电机的旋转运动转化为透镜组沿光轴方向的直线移动。反馈调焦镜组位置的传感器是14位绝对式光电轴角编码器。
调焦底板占整个调焦机构的比重最大,因此选用密度和成本都较低的铝合金作为调焦底板的材料,这样既可以做到与探测器本体材料一致,同时还能控制成本,减轻整机重量。其它零部件的选型时,在保证性能的前提下,尽量选取了重量轻的型号。设计完成的调焦机构总重量约为600g,满足重量要求。
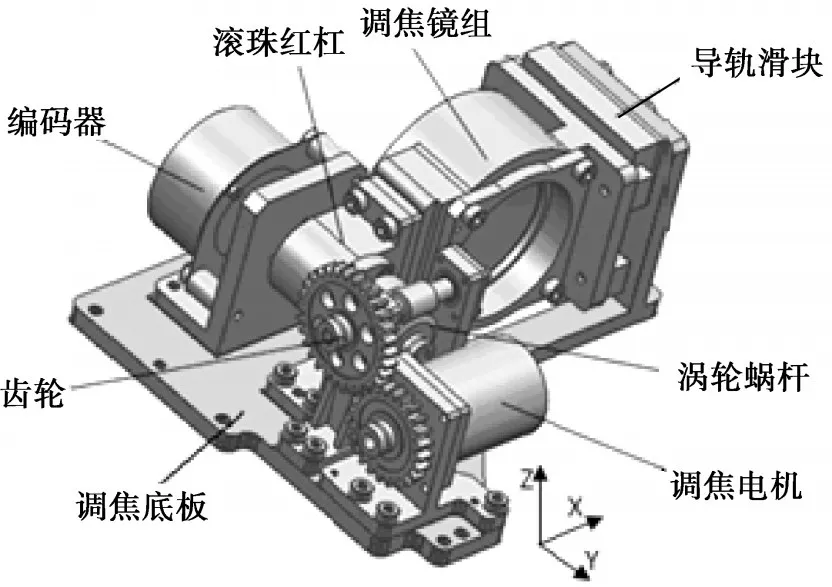
图3 调焦组件结构示
2.3 减速传动机构设计
为使调焦机构具有较高的调整精度,需要较大的减速比。减速装置的结构形式有多种,考虑调焦组件工作时应具有良好的位置稳定性,采用具有自锁功能的蜗轮蜗杆传动形式,减速机构传动原理如图4所示。
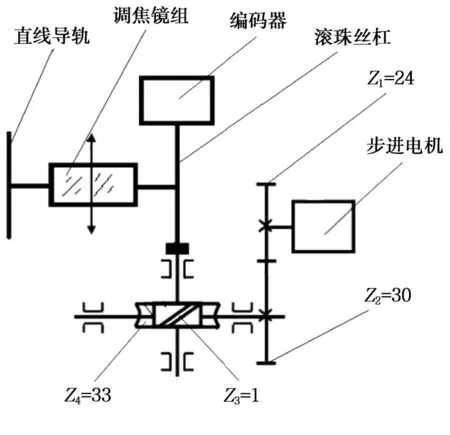
图4 减速机构传动原理图
调焦电机输出的转矩经过齿轮和蜗轮蜗杆传递给滚珠丝杠,再由滚珠丝杠带动调焦镜组在直线导轨上前后移动,进而实现调焦功能。一对齿轮的模数为0.5,齿数分别为z1=24和 z2=30,蜗杆模数为0.5,头数为 z3=1,蜗轮模数为0.5,齿数为z4=33,因此减速机构的总速比为:

2.4 丝杠导程设计
探测器都有一定的允许离焦量,在允许离焦量范围之内,不会造成图像分辨率的下降。允许离焦量的最大值等于相机的半倍焦深,计算公式如下:

式中:±Δ表示焦深;F表示F数(相对孔径的倒数);λ表示相机工作的中心波长。红外探测器的半焦深为:

根据要求,红外探测器的调焦精度为0.06mm,调焦范围±2mm。
为了便于调焦编码器计数,编码器运转360°应能完整读取调焦镜组在调焦范围内所有位置的码值,而滚珠丝杠直接驱动编码器,因此编码器运转一周时,正好对应滚珠丝杠一个导程,由于调焦范围为±2mm,因此丝杠的导程不能小于4mm,考虑到项目中对于整机重量的严格控制,不宜将丝杠导程设计得过大,否则会导致丝杠整体尺寸偏大,重量偏重,因此将丝杠的导程设计为4mm。
步进电机为四向八拍工作方式,每步转角1.8°,通过减速机构变速,电机每运转一步丝杠转动的角度为:

那么,电机每运转一步对应丝杠移动的直线距离为:

该直线距离小于调焦精度0.06mm,因此丝杠导程的设计是合理可行的。
2.5 调焦电机选型
调焦电机为整个调焦机构提供力矩,为了使机构能够稳定可靠的运行,首先需要对整个系统运行所需的力矩进行计算。电机输出的总力矩可由下式计算:

式中,Ma为电机启动加速力矩,Mf为导轨摩擦折算至电机的力矩。
当步进电机采用矩形驱动时,其启动加速力矩为:

式中,JO为转子惯量(kg×m2),JL为全负载惯量(kg×m2),θs为马达步距角(°/STEP),f为矩形驱动时的脉冲频率(Hz)。将上述参数的实际数据代入公式(7)可得Ma=4.68mNm。

导轨摩擦折算至电机的力矩Mf为:式中,u为导轨摩擦系数,W为滑动部件总重量(N),s为丝杠导程(cm),η为传递效率,i为传动比。将上述参数的实际数据代入公式(8)可得Mf=0.172×10-6Nm。
因此,电机输出的总力矩为:

选用Phytron公司型号为VSS25的电机,其保持转矩为12mNm,达到了理论上系统所需力矩的2.56倍,由此可见,电机的力矩裕度足够。
3 调焦误差分析
调焦误差主要包括编码器误差、传动机构误差两部分。编码器误差包括分度误差δ1和编码器测角误差δ2。14位绝对式光电轴角编码器的分度误差为:

其测角误差为:

因此编码器误差为两部分之和:

传动误差包括从减速器误差δ3、滚珠丝杠传递到编码器的误差δ4和导轨的传动误差δ5。以目前光机所的机械加工精度,减速器误差可控制在δ3=2μm以内。滚珠丝杠和直线导轨都选用THK公司精度等级为C0级的高精度丝杠和导轨,滚珠丝杠传递到编码器误差可控制在为δ4=0.51μm以内,直线导轨的误差可控制在δ5=0.36μm以内。整个调焦机构的误差为各部分误差之和:

因此,该机构的设计满足调焦精度不超过0.06mm的要求。
4 调焦机构模态分析
探测器整机的一阶基频约为80Hz,为了保证调焦机构不与整机发生共振,调焦机构的一阶基频应达到100Hz以上。
为了研究调焦机构的频率特性,利用ANSYS软件对调焦机构进行了模态分析,选用六面体实体单元对各零部件进行了网格划分,相接触的零部件之间添加接触对,将调焦底板的三处安装凸台进行固定约束,前三阶模态频率计算结果如表1所示,一阶振型如图5所示,调焦机构的一阶谐振频率为155Hz,满足指标要求。

表1 调焦机构前三阶模态频率
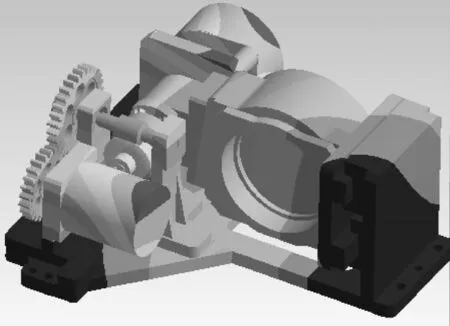
图5 调焦机构一阶振型图
5 调焦精度测试
为了验证该调焦机构的精度是否满足使用要求,对机构进行了精度测试。
在调焦机构的滑动部件表面上粘贴一块平面反射镜,用光电自准直仪对调焦镜组在全行程直线运动时的倾斜量进行了检测。检测结果表明,机构在X方向倾斜±4.9″、在Y方向倾斜±2.2″;在调焦组件的中部放置一块电子千分表,对调焦机构在全行程直线运动中的定位精度进行检测,检测数据表明,该调焦机构的定位精度达到0.003mm,满足项目总体提出的指标要求。环境试验前后,调焦机构的精度基本没有发生变化。
6 结论
调焦机构是星载红外探测器的重要组成部分,本文根据探测器的工作环境以及调焦精度的要求,设计了一种具有自锁功能的调焦机构,阐述了其减速机构、丝杠导程的设计方法,各零部件的设计既满足了性能要求,又最大限度得降低了成本、减轻了重量。对机构进行的误差分析表明其调焦精度优于0.06mm,模态分析结果显示,整个调焦机构的一阶基频为155Hz,满足空间环境的使用要求。
[1]张善钟.精密仪器结构设计手册[M].北京:机械工业出版社,1993.
[2]黄和平,夏寅辉,安成斌,等.大口径长焦距红外系统调焦机构设计[J].激光与红外,2005,35(10):745-747.
[3]丁亚林,田海英,王家琪.空间遥感相机调焦机构设计[J].光学精密工程,2001,9(1):35-38.
[4]杨永彬.空间光学相机调焦技术研究[J].航天器工程,2011,20(2):20-24.
[5]张新洁,严昌翔.星载光学遥感器调焦机构设计[J].光学精密工程,2009,17(11):2758-2761.
[6]安源,齐迎春.间相机直线调焦机构的设计[J].光学精密工程,2009,17(3):609-614.
[7]张海青,张立平,王智.航天立体测绘相机调焦机构的设计与实验研究[J].机械设计与制造,2009,47(4):57-59.
