车用摄像头锁紧装置姿态调整系统设计
2015-12-07曹群于信
曹群,于信
(长春理工大学 光电工程学院,长春 130022)
1 系统工作原理
车载摄像头如图1所示,图左侧为锁紧装置,右侧为摄像头,装配时,需将锁紧装置从小端面方向旋入摄像头凹槽内完成锁紧。锁紧装置自动安装系统原理如图2所示,主要由传送带、姿态识别装置、姿态调整装置、机械手等组成。
车载摄像头锁紧装置由传送带运送至姿态识别装置,当锁紧装置小端面向上时,认为其姿态错误,姿态调整装置对其进行调整后送往返回区,再次进行姿态识别,直至姿态正确;当锁紧装置的大端面向上,认为其姿态正确,直接运送至拾取区域,由机械手进行拾取并完成安装。
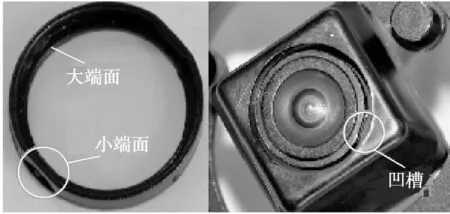
图1 锁紧装置与摄像头实物图

图2 系统工作原理图
2 识别及调整系统设计
2.1 姿态识别装置
采用红外激光照明配合PIN-FET混合集成光电接收器和定时器对其进行识别。如图3所示,当锁紧装置在A位置时,将对激光进行遮挡;而当锁紧装置运行至B位置时,将结束对激光的遮挡。在整个挡光过程中锁紧装置前进路程为S,令锁紧装置大端面朝上时前进的路程为Sd,锁紧装置小端面朝上时前进的路程为Sx,根据式(1)分别计算Sd和Sx:
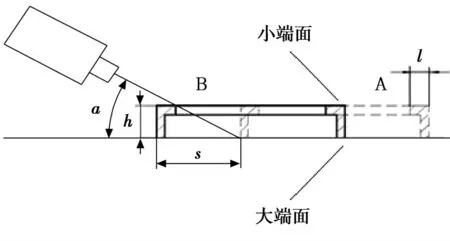
图3 识别原理图

式中,S—光源被遮挡时前进的距离(mm);h—锁紧装置自身高度(mm);l—锁紧装置端面宽度(mm);a―激光入射角度(°);T―锁紧装置遮挡光源的时间(ms);v—锁紧装置传送速度(m/s)。
通过对式(1)的分析,发现影响路程S的因素有两个,首要因素为激光光线的入射角度a,次要因素为锁紧装置的端面宽度l,而锁紧装置的端面宽度为定值,因此可以通过调整光线的入射角度a,间接调整前进路程S的大小。在0°到90°的区间范围内,余弦函数为减函数,随着a值的增大而减小,当a值取值越小时,相对而言其前进的路程S也就就越大,而在速度一定的情况下,路程越大,运动时间也就越长,适当选取激光光线的入射角度,可有效增大遮光时间,有利于对时间信号的采集。
设a=30°,h=3.5mm,锁紧装置大端面宽度l=1.75mm,则Sd=7.812mm,当取小端面宽度l=1mm时,可得出Sx=6.812mm。
令Td为大端面朝上时遮挡光源时间,Tx为小端面朝上时遮挡光源的时间,取v=0.05m/s时,根据式(2)可分别计算出,Td=156.24ms,Tx=136.24ms。说明锁紧装置在不同姿态下其遮光时间不同,所以定时器设定时间为T0=146ms,当锁紧装置遮挡光源时,光电接收器发出信号,定时器开始工作,若光源被遮挡的时间T大于T0时,此时锁紧装置大端面朝上,判断其姿态正确;而当T小于T0时,判定锁紧装置姿态需要调整。
2.2 姿态调整装置
姿态调整装置如图4所示,施力装置推动锁紧装置由A通道口进入,上升至B处,同时已将锁紧装置调整为大端面向上,然后从C出口输出,进入返回区。
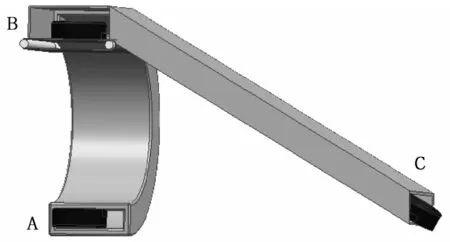
图4 姿态调整机构

图5 施力机构
施力装置如图5所示,初始状态时,弹簧处于压缩状态,电磁铁导通,将施力滑块吸附在电磁铁表面,当电磁铁断开时,施力滑块在弹簧力的作用下快速弹出,将锁紧装置弹入姿态调整装置A口。
根据动能守恒定理可知,在忽略摩擦力和空气阻力的情况下,锁紧装置的初速度可以根据公式(3)进行计算:

其中,m—物体质量(kg);v末—物体的末速度(m/s);v初―物体的初速度(m/s);g—常数(N/kg);h—物体上升高度(m)。
设 h=0.1m,v末=0m/s,根据式(3)可计算得锁紧装置的初速度v初=1.4m/s,施力滑块1与锁紧装置发生碰撞时遵循动量守恒定律,取滑块1的质量m2=40g,锁紧装置质量m1=5g,令锁紧装置在发生碰撞后的速度v1=v初=1.4m/s,根据式(4)

可计算出施力滑块1在发生碰撞前的速度v2=0.175m/s,根据能量守恒可知弹簧的弹力对滑块所做的功转化为滑块的动能,即

式中,F―弹力(N);S―路程(m)。
而弹簧所提供的弹力随弹簧压缩量的变小而减小,公式可转化为:

取 v末=v2=0.175m/s,S=0.01m,S为施力滑块前行的距离,则可计算出弹簧提供的弹力F=0.1225N。考虑空气阻力和摩擦力对锁紧装置运动状态的影响,所以根据以往经验和实际情况以弹簧提供的弹力F=1N完成弹簧设计,既可完成翻转。
经姿态调整装置持续调整后,大端面朝上的锁紧装置数量明显增多,有效的提高供给速度,使整个系统的工作效率有所提高。
3 识别准确率分析
在正常工作中由于传送速度的变化,对识别装置影响较大。假设传送速度在±5%的范围内变动,则取最小速度为vmin=0.0475m/s,最大速度vmax=0.0525m/s,分别计算Td和Tx。计算结果如表1所示,结果表明在两种极限速度下,均满足识别装置的工作条件,即Tx<T0<Td成立,识别装置均能正常工作。
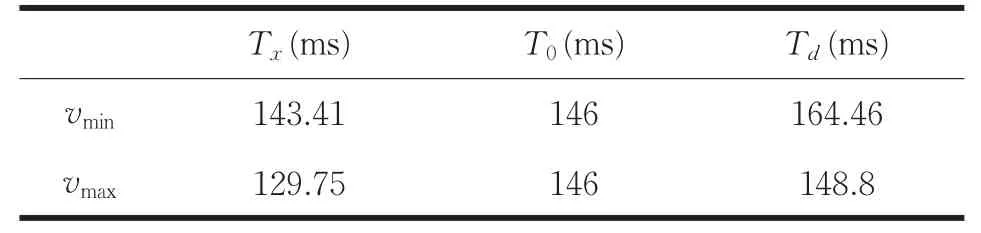
表1 不同速度下求得的时间值
经验证,传送速度在±5%的范围内变动,定时器正常工作,识别装置仍然可以完成识别。识别准确率可以达到95%以上。
识别装置主要由光源和接收器以及定时器构成,光源采用激光二极管即可满足要求,接收器型号为L20型PIN-FET型光电接收器,其光敏面大小为Φ75μm,脉冲上升时间≤17.5ns,响应度≥35mV/uW,定时器选用时钟脉冲为1ms的定时器,即可准确完成识别任务。
4 结束语
本文对锁紧装置的自动安装系统进行设计,采用激光照明和PIN-FET混合集成光电接收器配合定时器联合工作对锁紧装置的姿态进行识别,这种识别方法识别速度快、正确率高,锁紧装置在运送过程中即可完成识别,调整装置对锁紧装置的调整速度快,有效提高锁紧装置的供给速度,由机械手完成锁紧装置的安装,可有效提高摄像头的安装效率,降低生产成本。
[1]龚祖荣.精密机械设计基础[M].北京:机械工业出版社,2007:170-173.
[2]庞博.汽车倒车摄像头自动调焦系统设计[D].长春:长春理工大学,2014:8-10.
[3]于信.倒车用摄像头装调准备系统研究[D].长春:长春理工大学,2014:19-23.
[4]赵栋杰,郭宏亮,亓振华.圆锥滚子轴承自动装配机的研究现状[J].农业装备与车辆工程,2011,7(7):47-53.
[5]高云国,张倩,史亚莉.无导轨高精度位移台的结构设计[J].光学精密工程,2009,9(9):2200-2205.
[6]张晋西,张甲瑞,郭学琴.UG NX/Motion机构运动仿真基础及实例[M].北京:清华大学出版社,2009:97-108.
