基于某型多目标测量雷达数据采集器的数据分析
2015-12-07赵巨波
赵巨波
(中国人民解放军92941部队装备部,葫芦岛 125001)
某型多目标测量雷达(以下简称DMC雷达)为全相参高分辨力相控阵雷达,主要用于完成多目标跟踪测量任务。DMC雷达能够记录参试目标的跟踪测量之后的点迹和航迹信息,虽再现当时的态势,但是无法用于试验评估、事故判定、操作训练等场合。DMC雷达数据采集器是针对DMC雷达设计的原始信息记录和存储设备。主要记录的是DMC雷达的中/视频信号,可供试验进行事后准确的定量测试和评估。本文依托DMC数据采集器,基于开发的雷达中/视频信号采集与分析系统,利用实测数据进行了海杂波特性分析。
1 DMC雷达数据采集器系统组成及工作原理
DMC雷达数据采集器由主控计算机、采集记录设备以及DMC雷达数据采集接口卡组成。主控计算机采用便携式笔记本电脑,采集记录设备封装了采集卡,二者通过USB电缆连接。采集记录设备采集DMC雷达中频/视频回波信号,并通过笔记本电脑USB2.0接口将采集数据传输到笔记本电脑内存中,供处理、显示和分析。
采集记录设备实物照片如图1(a)、(b)所示,外场数据采集和事后数据回放情况如图1(c)、(d)所示。
DMC雷达数据采集器工作最高频率为100MHz,可通过对送给A/D的时钟进行分频来设置相应的采集频率。A/D的结果扩展为16位,低4位为0,高12位是A/D转换结果。图2中虚线框部分由FPGA实现,FPGA主要完成数据采集控制与数据传输控制的任务。

图1 采集记录设备实物照片和数据采集图片
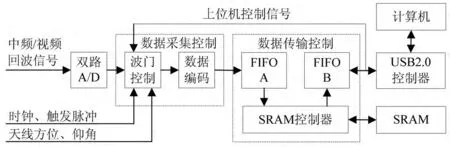
图2 DMC雷达数据采集器工作原理
2 实测数据的海杂波特性分析
2.1 雷达中/视频信号采集与分析系统
本文开展的对实测数据的海杂波特性分析,是基于雷达中/视频信号采集与分析系统的。
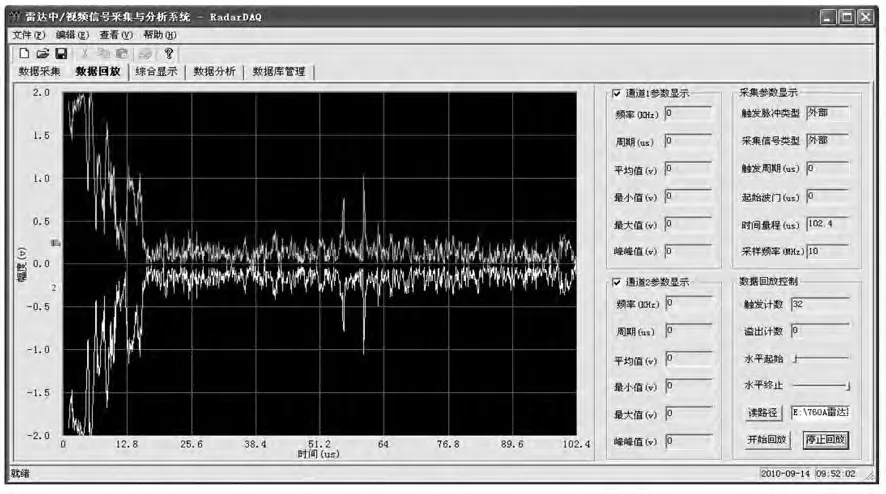
图3 数据回放画面
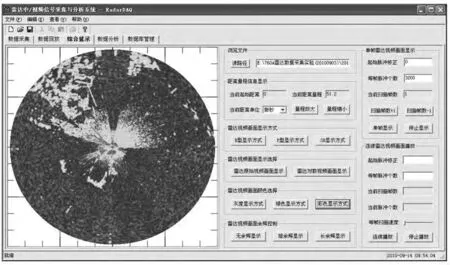
图4 综合显示画面
雷达中/视频信号采集与分析系统主要完成雷达中频/视频信号的采集参数设置和采集数据的实时显示与数据分析,具有数据采集、数据回放、综合显示、数据分析和数据库管理等五项功能。
系统软件基于Windows操作系统,采用数据抽取、坐标查表映射和DirectDraw等技术完成实时显示[1-4],同时采用多线程技术避免数据显示与实时采集的冲突。系统应用界面程序采用Visual C++开发环境,可以在A显和P显坐标下观察采集的目标回波信号,同时将采集的雷达回波数据以二进制格式保存在计算机硬盘上,供MATLAB等软件进一步分析使用。
2.2 数据分析
下面是对DMC雷达采集的海杂波数据的分析结果。雷达天线固定不动,圆极化,重复周期为3.3ms,采集频率为5MHz,数据格式为:每个重复周期均有500个32位的数据,前250个数据为I通道数据,后250个数据为Q通道数据。采集实验时,雷达天线方位190度,俯仰-1度固定不动对准海面,连续采集海杂波信号,MGC(手动增益控制)为63dB。此批数据的三维图形如图5、图6所示。
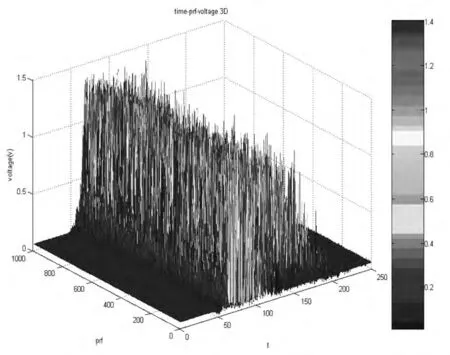
图5 time-prf-voltage三维图形
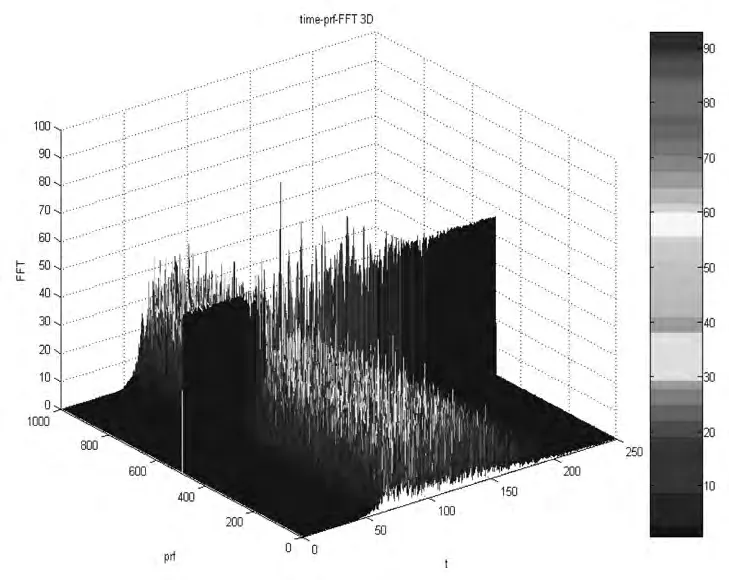
图6 time-prf-fft三维图形
对海杂波幅度建立拟合模型之前,首先对I、Q通道的数据进行分析,可以看到杂波幅度较强集中在大约第50~150点之间,如图7和8所示。判断在不同的极化条件下,其是否符合高斯分布密度函数,一般采用斜度和峰度来衡量一种分布是相对分散或是集中。斜度为正值时表明其均值右边有不对称的拖尾,负值时表明其均值左边有拖尾。峰度衡量一种分布的相对尖锐或平坦程度。对于高斯分布,这两个值都等于0,说明一种分布偏离高斯分布的程度。
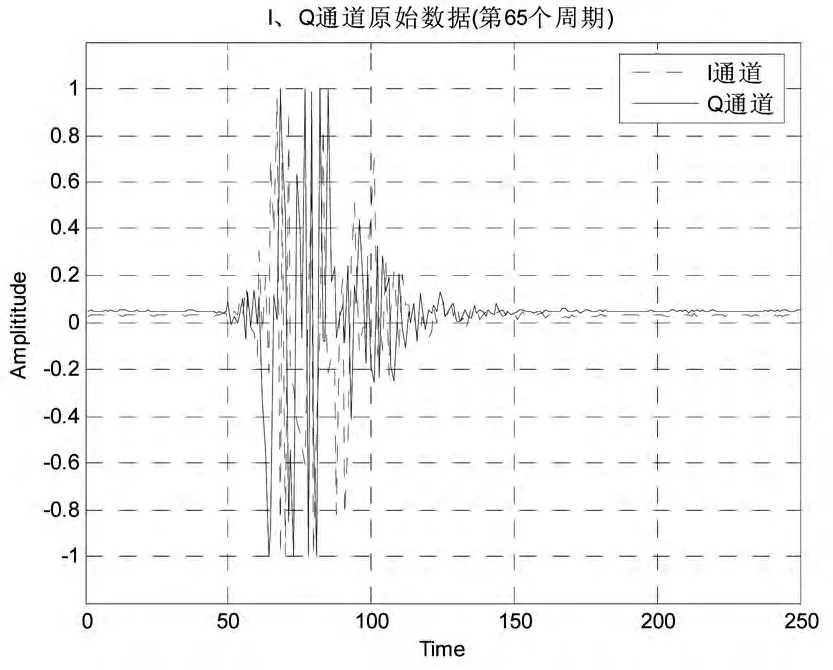
图7 第65个周期信号IQ两路值
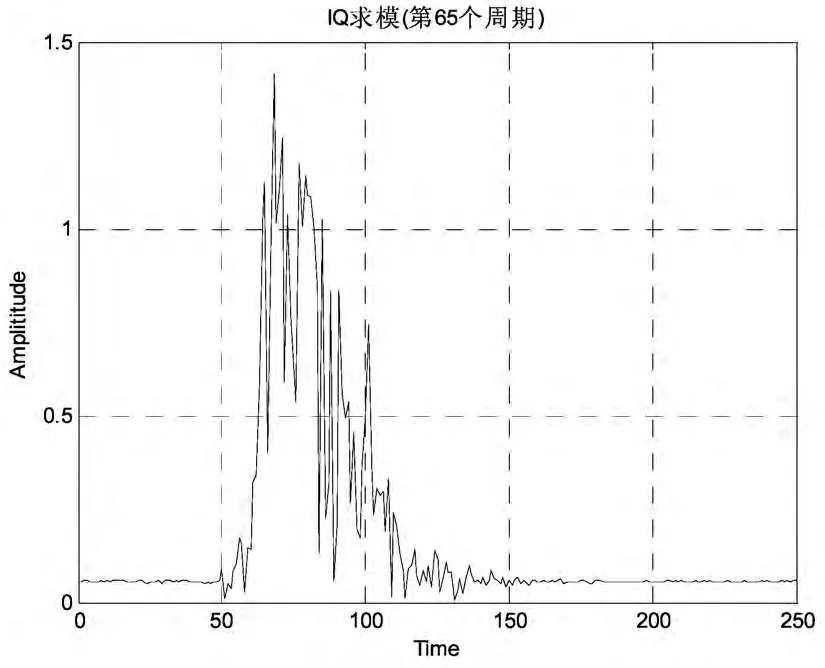
图8 第65个周期信号模值
对于本批海杂波数据,表1列出了I、Q通道的斜度和峰度值。
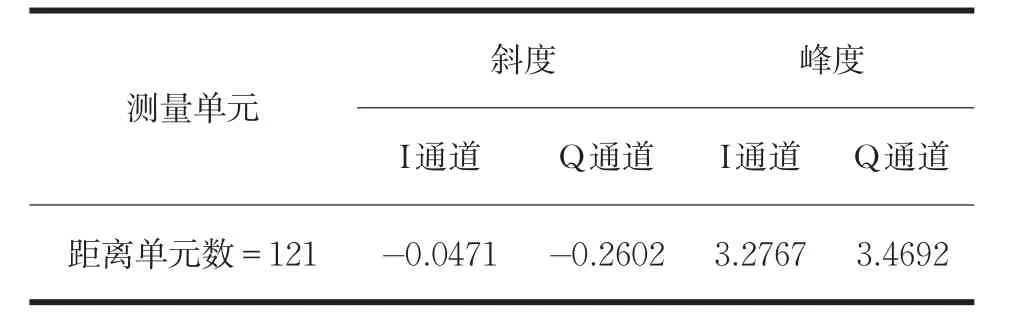
表1 海杂波数据峰度和斜度值
由表1结果可见,在此测量单元中,I、Q通道的斜度不显著,数值为负值,即有位于左边的不对称拖尾,这是造成杂波幅度有较长拖尾的原因。峰度值较小,说明数据分布相对平坦,没有较大的概率波峰。
对数正态模型和K分布模型都有很好的拟合准确度,是最常用来描述海杂波幅度的模型。根据两种模型的原理,在对海杂波幅度已经进行直方统计的基础上,分别采用对数正态分布以及K分布进行拟合,并进行χ2分布检验。其中K分布拟合时采用Watte修正之后的方法,即采用二阶、四阶和六阶样本矩对K分布的参数进行估计。曲线拟合效果如图9所示。
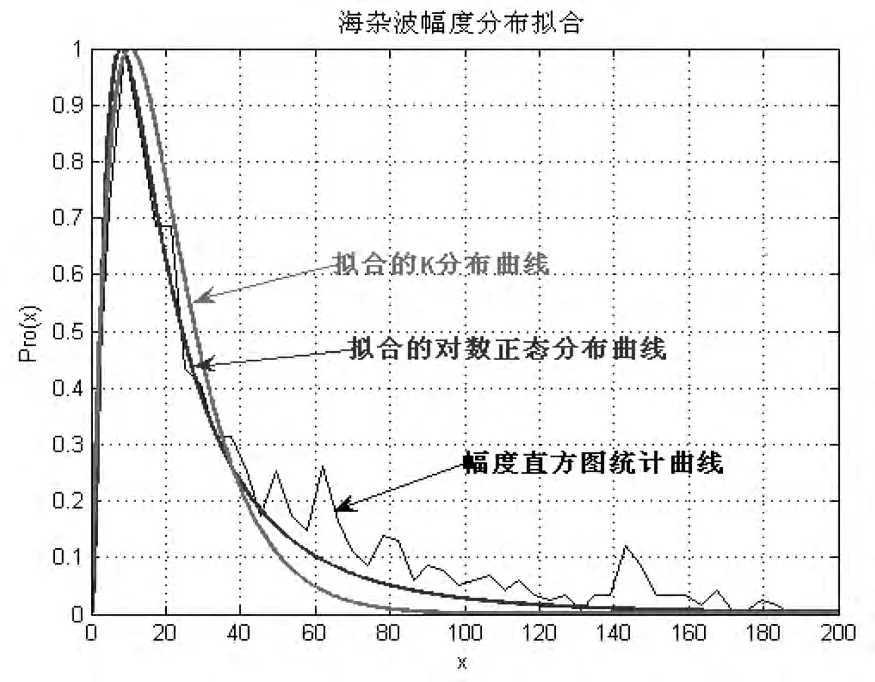
图9 海杂波幅度分布拟合曲线
对对数正态分布和K分布拟合曲线分别进行χ2检验,在采样区间为100时,其累计均方误差分别为153.4302和167.9186。根据先前的规定,取其中误差较小的一个作为杂波幅度分布的模型。这里二者的误差相差不大,效果比较接近。相对来说,对数正态分布拟合的误差稍小,在低幅度区域,对数正态拟合得比较准确,与K分布相差不大;而高幅度区域对数正态分布的效果明显优于K分布,即对数正态分布对海杂波尾部的拟合更好,这正是杂波处理关心的区域。因此,这里选择对数正态分布作为海杂波幅度分布的模型。
当然,这一模型只适用于本批海杂波数据,由于海洋表面的复杂、无规律的、永无止境的运动特性以及其它因素,如地杂波,气象杂波,热噪声的影响,建立统一的幅度分布模型还不现实,只有基于实际测量数据的杂波模型才具有现实意义。
海杂波的自相关函数和功率谱密度如图10和图11所示。
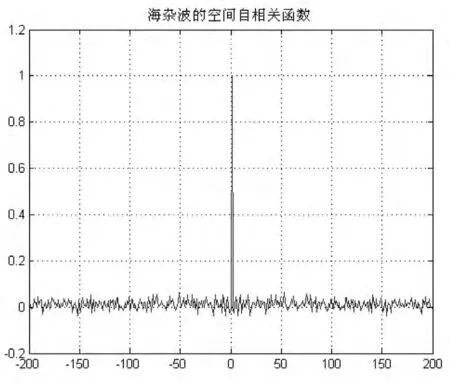
图10 海杂波的空间自相关函数
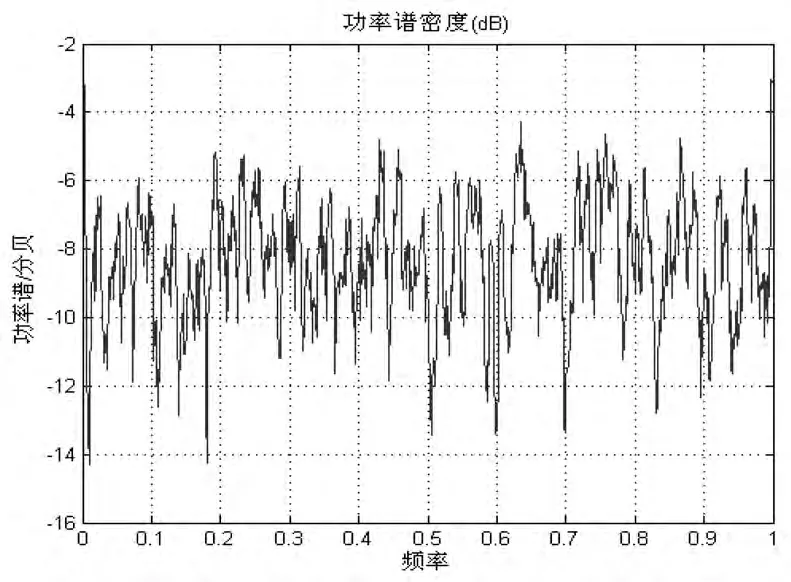
图11 海杂波的功率谱密度
这里仅给出了1000个重复周期所有第121个距离单元的杂波幅度拟合曲线,实际上在其它距离单元,情况多少有所不同。在极个别距离单元,拟合效果K分布要好于对数正态分布,但也是效果相差不大;绝大多数距离单元上,都是对数正态分布的效果优于K分布。
以下为本批海杂波数据的频谱特性统计结果。以海杂波的峰值(第68个距离单元处)的500个重复周期的数据来分析信号的频谱,即做500点的FFT,如图12所示。复信号的频谱为单边谱。图中横坐标对应重复周期数目,第500点对应的重复频率为303.03Hz,纵坐标对应信号做FFT之后的模值。为了分析不同距离单元上频谱的差异性,以与该距离单元偏离10点以外(即第78点)的点为例,对该距离单元的500个方位进行谱分析,从图13中可以看出,海杂波在临近的距离单元上频谱的一致性比较好。
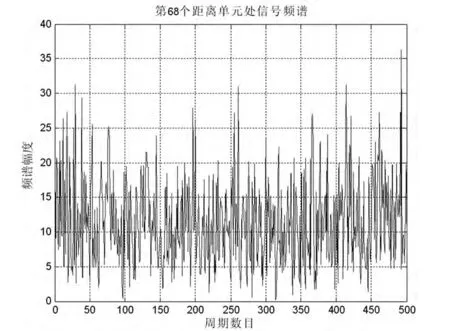
图12 复信号频谱(第68距离单元)
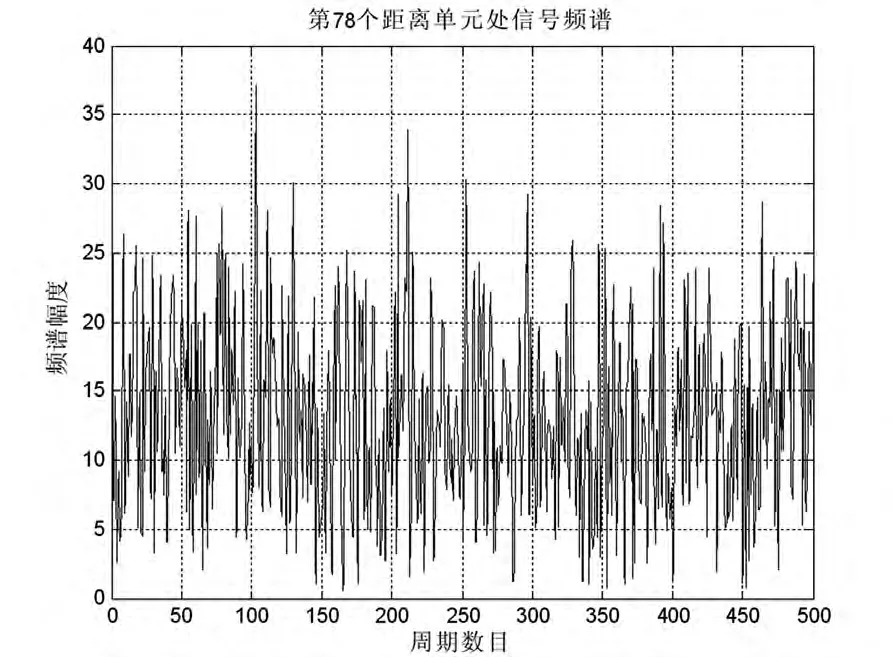
图13 复信号频谱(第78距离单元)
将谱线进行局部放大,可以发现频谱的峰值点在第29点,以频谱的峰值点为多普勒频移,可以计算出海杂波的多普勒频移为

折合成海杂波的径向运动速度为

其中λ是取雷达发射信号的中心频率(5675MHz)计算得来,即

以电压3dB处频谱宽度作为海杂波的频率分布的标准差为

可以计算出海杂波的速度分布的标准差为

3 结论
本文基于DMC雷达数据采集器开发了雷达中/视频信号采集与分析系统,依托该应用程序,利用实测数据,对高分辨力雷达和新的信号形式下的海杂波特性进行了分析和建模方法研究。后续应建立更加丰富完善的雷达目标回波数据库,可供事后准确的定量测试和评估,同时可开展适合新型雷达装备的信号处理、目标检测与识别方法的应用研究。
[1]康伟,郑正奇.Windows下实时数据采集的实现[J].计算机应用,2001,13(3):105-107.
[2]梁景新,薛余网.PPI雷达信号微机显示中快速极坐标—直角坐标映射[J].上海交通大学学报,1999,14(1):76-79.
[3]方伟,何友,欧阳文.DirectDraw与Flash技术在雷达模拟器设计中的应用[J].舰船电子对抗,2003,26(3):42-45.
[4]柳青松.基于DirectDraw的计算机图像显示[J].火控雷达技术,2004,22(1):76-78.
