四轴飞行器的数学模型
2015-12-07王震宇熊家新陈纯刘丽
王震宇,熊家新,陈纯,刘丽
(长春理工大学 机电工程学院,长春 130022)
伴随着经济的发展和进步,四轴飞行器以其形体小、成本低、低环境要求、较强生存能力、省人、省物、安全方便等优势,成为各国高精尖技术的应用对象。要实现四轴飞行器的基本功能,那就要有完整的控制算法,因此需要建立四轴飞行器在低空下、近距离的数学模型,以便将四轴飞行器应用于需要它的复杂场合[1-3]。
1 四轴飞行器的飞行原理
1.1 升降控制
如图1所示,同时提高四个电机转速使飞行器上升,同时降低四个电机转速使飞行器下降。因为同时提高或降低三个电机转速会导致其姿态变化,所以一般不采取这种方式实现升降控制。
1.2 俯仰滚转控制
从理论上讲,四轴飞行器的结构是对称的,所以俯仰与滚转具有类似的控制原理。如图1所示,提高电动机M2转速时降低电动机M3转速,四轴飞行器以M1、M4所在的轴为轴,从M2向M3方向旋转。若M2为前进方向则四轴飞行器处于俯仰状态,若M1为前进方向,则四轴飞行器处于滚转状态。平稳飞行状态四轴飞行器四个电机等速转动,当某个电机转速增大时,机翼下部压强增大,促使机体做刚体旋转运动,沿前进方向是俯仰,与其垂直则是滚转运动。
1.3 偏航控制
四轴飞行器的偏航控制要比俯仰与滚转控制难度高些,想要平稳的改变四轴飞行器的航向,就要同时改变四个电机的转速。如图2所示,M1、M2、M3、M4为四轴飞行器的四台控制电机,在M1、M4逆时针转动并且M2、M3顺时针转动时,降低M1、M4转速时提高M2、M3转速,由转动惯量的惯性矩平衡原理,主机体就会按逆时针方向旋转。反方向改变转速,主机体会按顺时针方向旋转。四轴飞行器飞行时表现为航向改变。

图1 四轴飞行器俯仰滚转的控制图

图2 四轴飞行器偏航的控制图
2 旋翼的等效空气动力学模型
四轴飞行器在不同状态下动力学的系数是不一样的,如图3(a)所示,垂直飞行时,气流沿着旋翼轴向,如图3(b)所示,前进飞行时,在旋翼旋转平面和水平面成角αr,气流流过旋翼旋转平面不平行与轴向,而是斜穿过旋翼旋转平面,由此可知飞行状态不同四轴飞行器的气动特性就不同。飞行状态不同,四轴飞行器动力学系数就不同,模型也就不同,本文对四轴飞行器偏航时的旋翼受力做了简化处理,由叶素理论:四轴飞行器在偏航飞行状态,其旋翼上的力矩、力主要表现为,电机主轴的升力D、阻力E、侧向力矩F和扭矩G。由文献[2]得其求解的近似公式:


式中,p是空气密度,Α=πR2表示旋转面面积,Cr为旋翼拉力系数,CD为旋翼阻力系数,Co为旋翼扭矩系数,CR为力矩系数。旋翼的几何性状决定这些系数的大小,并且飞行姿态不同系数也会不同。ω为电机转速,由公式可知电机转速的平方与旋翼的力与力矩存在比例关系。根据控制的需要进行近似化,旋翼所受的升力为:

升力系数k由旋翼形状、尺寸与安装方式决定。

图3 旋翼与气流图示
3 四轴飞行器控制模型的建立
在建立四轴飞行器模型之前,要选取适当的空地坐标系,这样使建立四轴飞行器模型的过程相对简单,有利于分析与求解,因为四轴飞行器的速度、姿态角的大小与方向等参数是与坐标系相对应的。所以选择惯性导航中常用的两种坐标系,如图4所示,机体的XYZ坐标系与地面的xyz坐标系。前者是在四轴飞行器上固定的,X轴与前后方向的旋翼连线平行,经过四轴飞行器的几何中心正向同其前进方同向,Y轴与左右方向的旋翼连线平行,也经过四轴飞行器的几何中心并且垂直于X轴,Z轴平行于X轴、Y轴所在平面。后者是在三维空间中确定四轴飞行器位置的,四轴飞行器在哪里起飞哪里就是远点坐标,以用来确定其位置、姿态、偏航角的变化。飞机在地面刚要起飞时,两坐标系原点重合,相应的坐标轴重合。
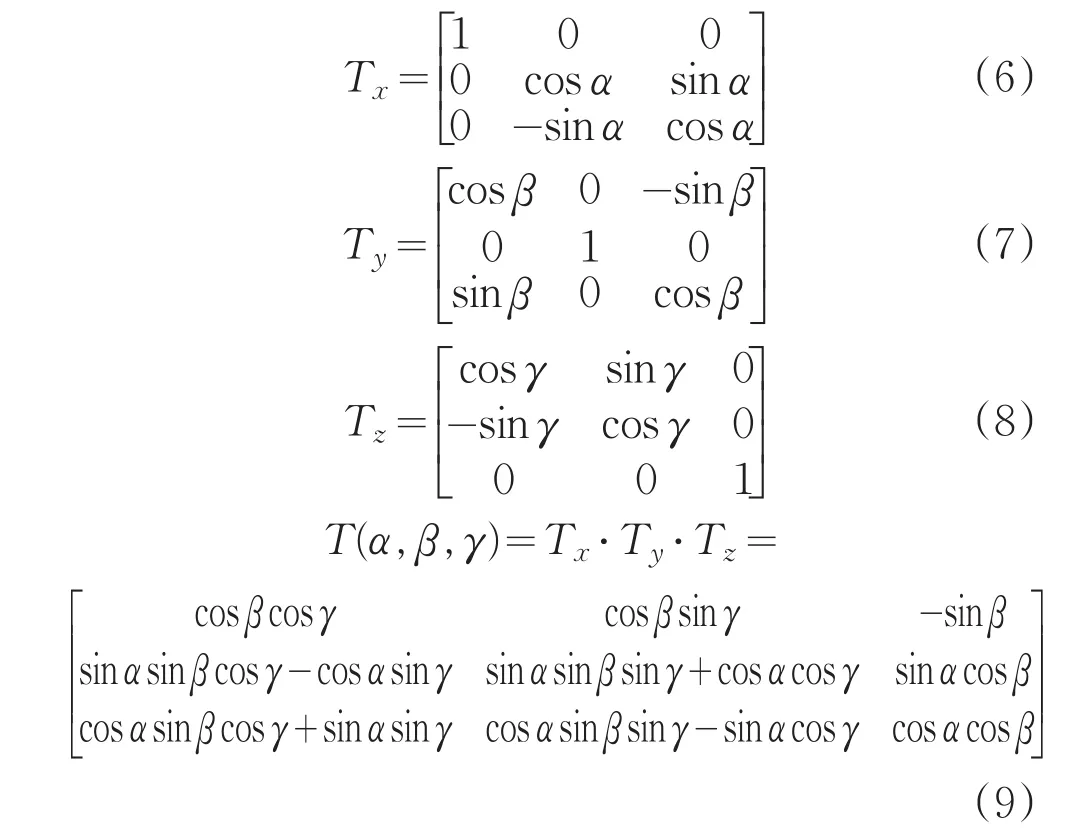
在分析四轴飞行器运动时,采用右手坐标系[7],那么如图4机体绕X轴旋转角为正,设机体绕X轴、Y轴、Z轴的旋转角分别α、β、γ,其中α是机体的Y轴与Z轴与地面的y轴与z轴的夹角,β是机体的X轴与Z轴与地面的x轴与z轴的夹角,γ是机体的X轴与Y轴与地面的x轴与y轴的夹角,三者分别是横滚角、俯仰角、偏航角。根据文献[7]可得到机载坐标系上的点到地面坐标系上的点的变换矩阵:

图4 飞机横滚示意图
四轴飞行器控制模型的建立过程中,作出了一般性假设:四轴飞行器的质量是常数,且在其内部均匀分布;地面是惯性参考系,由于四轴飞行器在近距离、低高度飞行,所以地表近似为平面,重力加速度为常数g;不计地球自转与公转的影响;四轴飞行器的几何形状、机械结构、质量关于机载坐标平面XOZ对称,重心与几何中心重合;那么四轴飞行器的惯性矩阵为对角阵J。


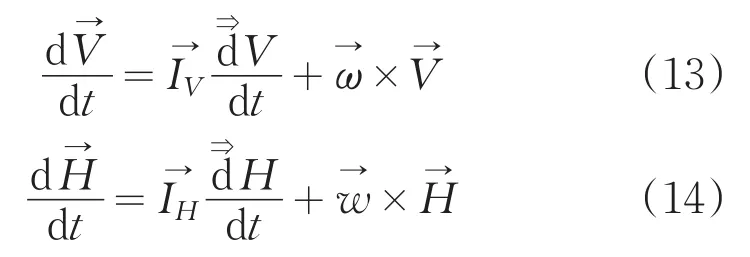
忽略弹性形变与振动时,四轴飞行器在空间的运动为刚体运动,共有六个自由度,机载坐标系上的三个角运动和地面坐标系中沿轴线的三个线性运动。根据牛顿的第二定律,其动力学的方程向量表示式为:其中,作用在四轴飞行器机体上的合外力之和为F,其质量为m,其质心在地面坐标系的绝对速度为V,作用在四轴飞行器机体上的合外力矩之和为M,其在地面坐标系下绝对的动量矩为H。若在机载坐标系下,依据理论力学知识建立其运动方程,绝对导数在机载坐标系下为:
(1)线性运动方程
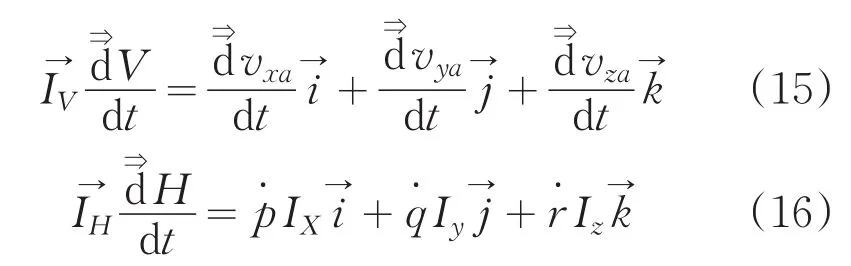
四轴飞行器在机载坐标系上质心的速度V→的分量为:

外力之和F在机载坐标系上的分量为:

将式(13)、(15)、(17)、(18)代入(11)整理得:
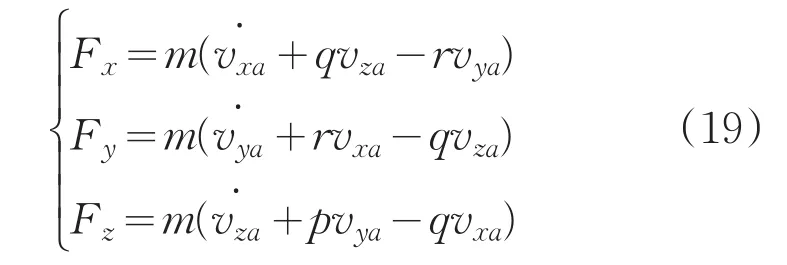
把地表坐标系的式(5)使用转换矩阵T(α,β,γ)转换到机载坐标系下并代入式(19),整理得:
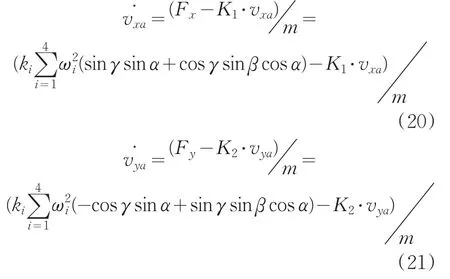

式中ki是等效的阻力系数。
(2)角运动的方程
四轴飞行器在机载坐标系上角速度的分量表示为:

四轴飞行器机载角与机载角速度的关系:

解得机载角速度:

依据刚体的转动定律与动量矩计算的方法,式(10)及(12)解得机体的力矩方程:

式中,Mx、My、Mz为机体上和力矩 M→在机载坐标轴上的分量。类似线性运动求解,可得到角运动的方程:
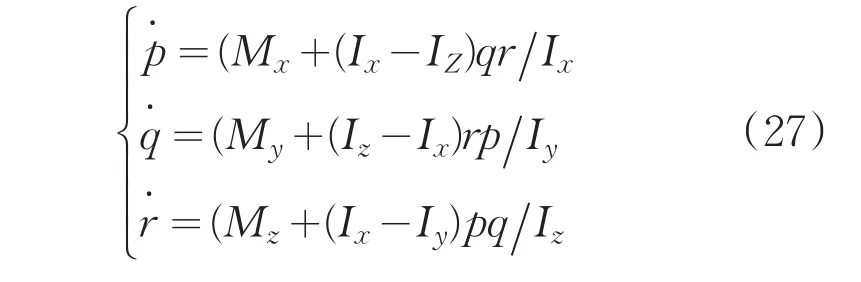
总结上述分析,得到四轴飞行器在低空近距离飞行时的运动方程:

4 仿真
本文建立了四轴飞行器仿真模型,用MATLAB的SIMULINK工具对其模型及控制器进行仿真。先用小扰动线性化方法处理式(28),根据G(s)=C(sI-A)-1B得到各通道的传递函数。由于时轴飞行器的模型的非线性与耦合性导致模型PID控制器参数参数选择困难,我们借助Signal Constraint优化工具箱来对PID控制器的参数进行自动调整[4],仿真结构图如图5。
Kp为比例因子,K i为积分因子,Kd为微分因子,Transfer Function代表各个通道传递函数,系统的延时时间Transport Delay。在Simulink中的Output constraint优化工具,迭代仿真结果与约束条件比较,自动调节PID控制器的三个因子,直到其满足系统响应性能的指标要求。
俯仰通道传递函数:


图5 SIMULINK仿真结构图
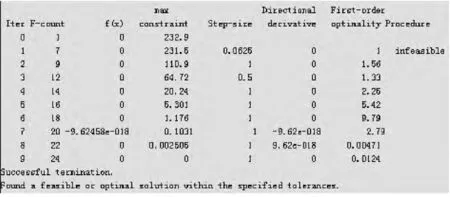
图6 俯仰通道的迭代计算过程的数据图
把传递函数代入仿真系统并输入阶跃响应得Output Constraint自动寻优工具的迭代曲线,通过优化工具得到数据图6所示,Iter为迭代的次数,F-count为函数总调用次数,加权约束Max constraint在系统的参数得到满足的仿真过程中逐渐的减少。Step size为搜索算法步长。方向导数Ditectional derivative是在寻优方向上迭代得到的曲线的变化率[6]。最后列是优化过程信息。当条件满足时提示(Successfully termination)成功收敛,且在Scope窗口输出最优曲线图7,由于对状态空间方程的小扰动线性化处理,所以控制曲线没有出现超调与振荡。

图7 俯仰通道单位阶跃响应图
用SIMULINK工具寻得俯仰通道PID控制器参数:Kp=27.13,Ki=5.61,Kd=2.39。由图7知PID控制器的俯仰通道的单位阶跃响应的稳态误差为零,上升时间和调节时间都小,因此可判断系统的动态特性良好。
5 结论
在建立了四轴飞行器的非线性的运动方程并线性化后,我们得到控制通道的传递函数,根据上述结果采用PID控制法设计各个通道的控制器,仿真结果经过一段时间都为1。这表明:四轴飞行器可以保持稳定的悬停姿态、飞行状态,所以本算法可以实现四轴飞行器控制,为四轴飞行器的进一步研究奠定了理论基础。
[1]Jason Jarrell,Yu Gu,Brad Seanor,et al.Aircraft attitude,position,and velocity determination using sensor fusion//AIAA Guidance,Navigation and Control Conference and Exhibit[C].Honolulu,Hawaii,2008:18-21.
[2]李振波,陈佳品,张琛.低雷诺数四旋翼飞行器升力分析与计算方法的研究[J].中国机械工程,2005,27(4):24-31.
[3]王东平.基于嵌入式的四轴飞行器控制系统研究与设计[D].泉州:华侨大学,2013.
[4]刘金瑶.先进PID控制及MATLAB仿真[M].北京:电子工业出版社,2003:13-26.
[5]李文明,张涛,陈俊江.无人机载设备状态监测系统的设计与实现[J].长春理工大学学报:自然科学版,2008,31(2):18-24.
[6]徐昕.Matlab工具箱应用指南一控制工程篇[M].北京:电子工业出版社,2000:167-172.
[7]童秉枢,吴志军,李学志,等.机械CAD技术基础(第三版)[M].北京:清华大学出版社,2008:132-162.
