非对称缸气液联控伺服发射系统模糊-PID控制研究
2015-12-07练永庆
练永庆,郭 煜,田 兵
(1.海军工程大学 兵器新技术应用研究所,湖北 武汉430033;2.海军装备研究院,北京100161)
0 引 言
为了消除和降低舱内排气噪声,许多国家都致力于研制新型的低噪音鱼雷发射装置,液压蓄能式鱼雷发射装置就是其中之一[1]。液压蓄能式发射装置属于非对称缸气液联控伺服发射系统[2],该系统控制阀阀口的非线性、气腔内热力过程的复杂性以及相对于驱动力较大的摩擦力,都决定了非对称缸气液联控伺服发射系统具有较强的非线性。本文主要在非对称缸气液联控伺服发射系统控制策略研究基础上,进行了该系统模糊控制器的设计,并对该系统在多种典型输入信号条件下的PID和模糊-PID控制过程进行仿真研究与分析。
1 非对称缸气液联控伺服发射系统简介
1.1 系统组成及工作原理
非对称缸气液联控伺服发射系统[2]的结构如图1所示,系统由气液缸、负载、传感器、计算机、控制器、高速开关阀及其驱动电路组成,采用PWM脉宽调制方法对高速开关阀进行控制。
非对称缸气液联控伺服发射系统的基本工作原理是:传感器采集的信号与给定的信号相比较,得出偏差信号,经过控制算法计算,计算机发出PWM控制信号控制液压高速开关阀的启闭,使得系统向着减小偏差的方向运动,从而实现负载位置、力的伺服控制。

图1 非对称缸气液联控伺服发射系统原理及参数示意图Fig.1 Principle sketch asymmetric cylinder pneumatic hydraulic combination control servo launching system
1.2 系统数学模型
系统数学模型主要包括:气体状态方程、液腔流量连续性方程、高速开关阀流量方程、系统力平衡方程、非对称缸气液联控伺服发射系统状态方程等,具体可参见文献[2]。
1.3 非对称缸气液联控伺服发射系统状态方程
根据系统数学模型,运用线性化理论对气液缸在平衡点附近作线性化处理,并进行拉氏变换,可得到有源非对称缸气液联控伺服发射系统状态方程为:

2 非对称缸气液联控伺服发射系统模糊控制器设计
根据模糊控制器设计基本步骤[3]进行非对称缸气液联控伺服发射系统模糊控制器的设计,该控制器以位置(或速度)误差E、误差变化EC为输入,控制量为输出的二维模糊控制器。
1)误差E、误差变化EC 以及控制量U的模糊集
误差E 及误差变化EC的模糊集取为{负大,负中,负小,零,正小,正中,正大},即

由于液压高速开关阀的控制量只能取[0,1],因此其模糊集取为{零,小,中,大},即

2)模糊集的隶属度函数
非对称缸气液联控伺服发射系统模糊控制系统采用三角形隶属函数,如图2所示。
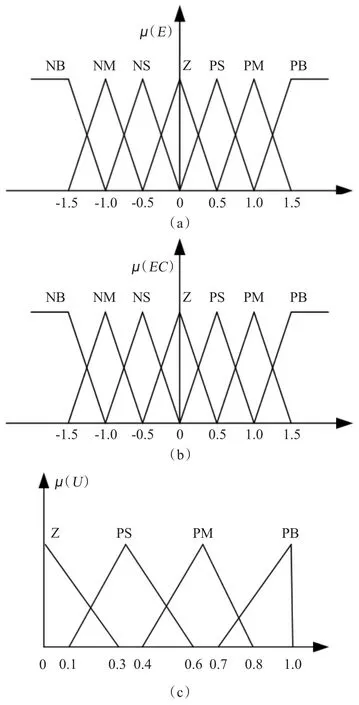
图2 隶属函数Fig.2 Membership function
3)模糊控制规则的建立
通过大量仿真分析,建立非对称缸气液联控伺服发射系统的模糊控制规则如表1所示。
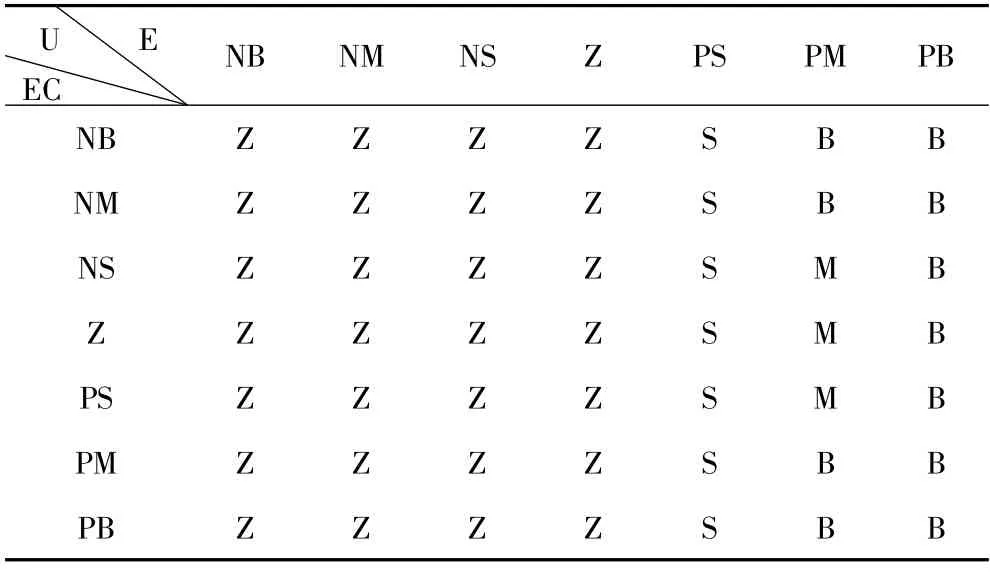
表1 非对称缸气液联控伺服发射系统模糊规则Tab.1 Fuzzy ruler of acphccsls
4)模糊推理
采 用 Mamdani法[4]进 行 模 糊 推 理,根 据Mamdarin法可得到控制量U的模糊集合为:

式中,w1=μA1(E0)∧μB1(EC0),E0为采样得到的误差,E0∈A1,E0∈A2,EC0为误差变化,EC0∈B1,EC0∈B2,μA1(E0)为A1隶属度,μB1(EC0)为B1隶属度,“∧”为取小运算;w2=μA2(E0)∧μB2(EC0),μA2(E0)为A2隶属度,μB2(EC0)为B2隶属度,“∨”为取大运算。
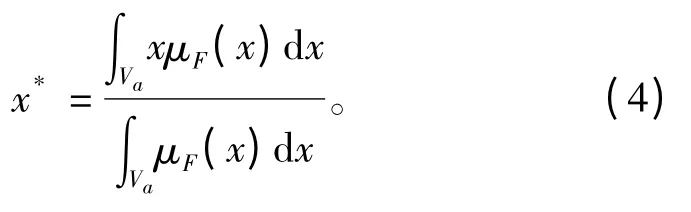
5)解模糊
采用重心法进行解模糊。重心解模糊器所确定的清晰量x*是模糊集F的隶属度函数所涵盖区域的重心[5],即

式中:μF(x)为模糊集F的隶属度函数;∫V为常规积分;V为积分区域。
如果将μF(x)看做是一个随机变量的概率密度函数,则重心解模糊器给出的就是这个随机变量的均值。有时应消去那些在F 中的隶属度值太小的x∈V,这使得重心解模糊器变为:
3 系统控制过程仿真
3.1 仿真模型及参数设置
由于非对称缸气液联控伺服发射系统是非线性系统,其状态方程见式(1)。现以系统的非线性方程为对象,采用不同的控制方法进行典型信号跟踪性能仿真,其仿真Simulink 框图如图3所示。模糊-PID控制采用模糊-PID 开关切换控制器,当误差量大时采用PID控制,当误差量小时采用模糊控制。

图3 系统控制仿真框图Fig.3 Simulation block diagram
仿真参数设置:
A1=0.125 7 m2(缸径0.4 m),A2=0.117 8 m2(活塞杆直径0.1 m),p10=0.5×106Pa,V10=0.07 m3,M= 1 000 kg,kq=0.1,kp=1 ×10-6m3/Pa·s。
由于系统没有回程控制,即系统速度在运行过程中总是大于0,因此在典型信号响应的输入选择时:对于位移量选择阶跃及斜坡信号;对于速度量选择阶跃、斜坡和大于0的正弦信号(正弦信号与同幅值的阶跃信号的叠加信号)。
3.2 仿真结果
系统控制过程仿真结果如图4和图5所示。图4为系统PID控制的典型输入信号跟踪仿真结果,图5为系统模糊-PID控制的仿真结果。


图4 系统PID控制结果Fig.4 The result of PID control

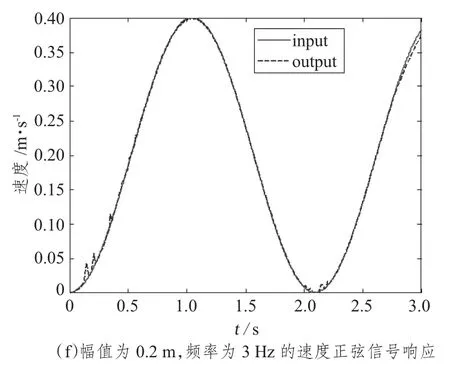
图5 系统模糊-PID控制结果Fig.5 The result of fuzzy PID control
3.3 仿真结果分析
从图4 可以看出: (a)对于位移阶跃信号,系统能较好地进行跟踪,但是一旦产生超调则无法回复到理想的输入值,原因是系统只对液压流量进行控制,无往复控制,即系统对于位移量只有单向控制能力。 (b)对于斜坡位移信号,系统在PID控制下不能很好跟踪,误差量将随时间的增加而增加。 (c)对于速度阶跃信号,系统能在短时间内接近理想输入值,但是随着时间的推移,误差越来越大,其原因是系统的动力源(气腔的压缩空气)所提供的动力在系统的运行过程中逐渐降低,而且采用固定参数式PID控制式系统不能及时获得足够的控制量来弥补系统动力的不足。(d)对于速度斜坡信号,系统同样不能很好跟踪,原因与(c)相同。 (e)和(f)中,系统对于速度正弦信号的跟踪,在低速时较好,在高速时误差比较大。
从图5 中可以看出,系统在模糊-PID控制下对于所选择的输入都能够很好跟踪,其不足之处为:从(c)中可以看出系统对于速度阶跃信号的响应存在较大超调,这跟所选择的控制量有关;从(e)和(f)中可以看出对于速度正弦输入信号,系统在初始段的跟踪能力要好于末端跟踪能力,这主要是由于系统动力不断降低的缘故。
从仿真结果可以看出,模糊-PID控制要优于PID控制,其主要原因有两大方面:其一,系统动力源时变,具体来说动力在系统运行过程中不断降低,而且不是线性变化;其二,系统只进行单程单方向控制,对于位置信号输入,一旦产生超调,系统将无法恢复到理想的输入值。这些也是无源非对称缸气液联控伺服发射系统所独有的特性。鉴于以上分析,传统的PID控制难以满足系统的性能要求,需要采用或结合其他智能控制方法。
4 结 语
在非对称缸气液联控伺服发射系统传递函数的基础上,设计了针对该系统的模糊控制器,并对非对称缸气液联控伺服发射系统进行了PID控制和模糊-PID控制过程仿真,获得多种典型输入信号的跟踪仿真结果。仿真结果显示:模糊-PID控制的效果要优于PID控制,其原因主要是系统的无源及单程控制特性决定的。在设计系统控制器时尤其要注意系统的这2 点特性。本文的研究工作可为后续该类发射系统的控制设计提供参考。
[1]练永庆,王树宗.鱼雷发射装置设计原理[M].北京:国防工业出版社,2012,4:65 -66.
[2]田兵,吴朝晖,许东风.非对称缸气液联控伺服发射系统动态特性[J].舰船科学技术,2013,35(10):119 -125.TIAN Bing,WU Zhao-hui,XU Dong-feng.Research on the dynamic characteristic of asymmetric cylinder pneumatic hydraulic combination control servo launching systems[J].Ship Science and Technology,2013,35(10):119 -125.
[3]曾光齐,胡均安,王东,等.模糊控制理论与工程应用[M].武汉:华中科技大学出版社,2006.
[4]徐秀芬.气液联控伺服发射系统的控制及其试验研究[D].哈尔滨:哈尔滨工业大学,2005.
[5]王立新.模糊系统与模糊控制原理教程[M].北京:清华大学出版社,2003:70 -87.
