一种六自由度串联机械臂的研制
2015-12-06李腾飞
陈 浩,李腾飞,陈 锐
(1.北京航空航天大学 机器人研究所,北京 100191;2.重庆大学 机械工程学院,重庆 400044)
一种六自由度串联机械臂的研制
陈 浩1,李腾飞1,陈 锐2
(1.北京航空航天大学 机器人研究所,北京 100191;2.重庆大学 机械工程学院,重庆 400044)
设计了一款六自由度串联机械臂,并对其机械结构与控制系统进行了详尽的论述。机械臂采用关节式的结构,工作灵活,可达空间大;基于PMAC多轴运动控制器搭建了切实可行的运动控制方案,控制系统具有很好的实时性和可扩展性。实验结果表明研制出的机械臂各关节运转良好,控制系统稳定、可靠,达到了设计目标。
六自由度;机械臂;研制;PMAC
0 引言
机器人可以代替人在危险的场合工作,特别是在核电站发生事故的情况下,使用救援机器人实施救援是一项很重要的施救手段,救援机器人搭载的机械臂是其完成救援任务的关键。结合核电站救援机器人关键系统开发项目,本文设计了一款六自由度串联机械臂,设计的机械臂为功能验证样机,暂不考虑核辐射的影响。
1 机械臂本体结构的设计
核电站内部结构复杂,机械臂将执行旋拧阀门、打开/关闭开关、抓取物品、插拔开关等工作,特别是核电站内部管道很多,涉及很多旋拧阀门的工作,目前多数文献开发的救援机械臂为5个自由度且没有可以连续旋转的自由度,工作范围较小且不利于阀门的快速旋拧。本文开发的机械臂有6个自由度,并且有2个自由度可以连续旋转,6个自由度为非耦合的结构,末端可搭载多种操作手。
设计的六自由度机械臂采用关节型式,具有工作灵活和可达范围大等突出的优点[1-3],其工作范围如下:第1轴(腰部)为0°~300°;第2轴(肩部)为0°~225°;第3轴(肘部)为0°~200°;第4轴(手腕转动)为连续旋转;第5轴(腕部俯仰)为0°~180°;第6轴(末端旋转)为连续旋转。
按照设计参数确定的机械臂传动方案如图1所示。6个自由度全部为旋转关节,1轴、2轴和3轴采用蜗轮蜗杆的形式,具有自锁功能[4],可以在突发及断电情况下保持位置,从而保护机械臂;4轴、5轴和6轴为非耦合结构,各自由度的运动互不干涉,为后续的控制提供了很大的便利。6个自由度的驱动均采用Manxon直流伺服电机,它具有高精度和高可靠性,可作为机械臂的理想动力源,电机前部装配行星齿轮减速器,后部装配增量编码器。连续旋转自由度的实现可以使用滑环结构,用来解决有相对转动部件的电源以及信号的传输问题。机械臂本体结构示意图如图2所示。
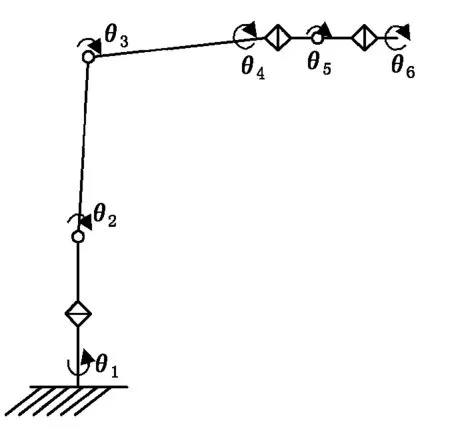
图1 机械臂传动方案
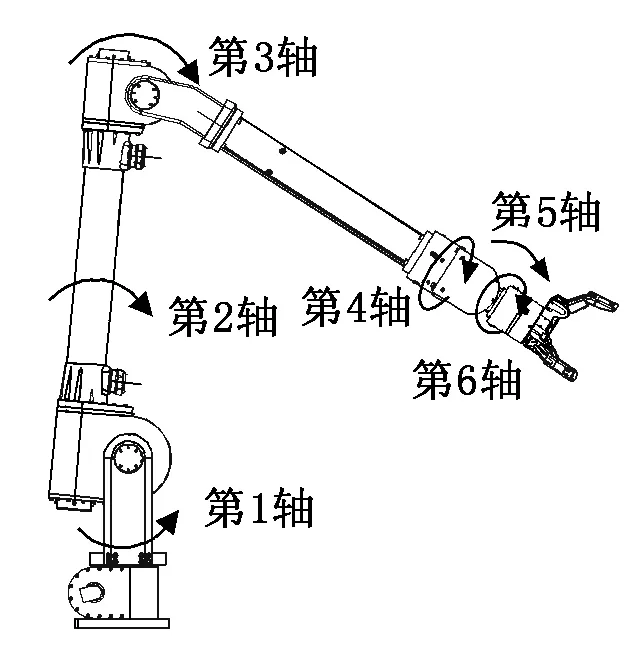
图2 机械臂本体结构示意图
1.1 1轴、2轴和3轴的机械结构设计
由于1轴、2轴和3轴具有类似的结构,现以2轴为例进行结构设计,其结构示意图如图3所示。蜗轮与U型支撑件通过键连接固连,肩部关节运动时,蜗杆一方面绕着自身旋转轴旋转,另一方面带动相关部件绕着蜗轮轴轴线旋转,实现肩关节的旋转动作。由于蜗轮蜗杆的自锁,在断电及突发情况下,关节可保持原有姿态从而保护机械臂不受损坏。该方式相比于采用具有抱闸的电机而言,成本更低。由于蜗轮蜗杆中心距的精度对效率的影响很大[5],因此设计了调整蜗轮蜗杆中心距的结构,蜗轮与机械臂本体固定,蜗杆轴的一端通过轴承与机械臂本体过盈装配,与蜗杆轴另一端装配的轴承与机械臂本体采用间隙配合,通过4个调整螺钉进行中心距的微调。微调结构可以保证蜗轮蜗杆具有准确的中心距,有效地提高工作效率。机械臂的腰部关节处留有安装孔,机械臂可以固定安装到地面、墙体或安装到移动平台上,其使用范围具有很好的可扩展性。
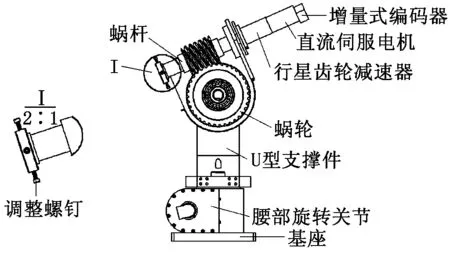
图3 肩部关节结构示意图
在1轴、2轴、3轴中,行星减速器的输出轴与蜗杆轴的键槽孔装配起来,从而将电机的动力输出给蜗杆。电机部分装配在机械臂的臂管内,不仅美观且节省了空间。
1.2 4轴、5轴和6轴的机械结构设计
4轴、5轴和6轴采用非耦合的传动,3个自由度之间的运动互不影响,为后续的机械臂的正、逆解的计算以及控制带来很大的便利[6-8];此外,这种非耦合的传动方案,3个关节具有分段式的特点,只有一层轴承嵌套结构,很大程度上降低了对于加工精度的要求,结构上也相对简单,为机械臂的安装提供了便利。
4轴、5轴和6轴的结构示意图如图4所示。4自由度电机与4自由度电机安装套通过螺栓连接,4自由度电机安装套与机械臂小臂(图4中未示出)通过螺栓连接,联轴器与5自由度电机安装套通过螺栓连接,5自由度电机安装套通过轴承嵌套在机械臂的小臂内部,4自由度电机输出轴与联轴器采用键连接,联轴器与5自由度电机安装套采用键连接,机械臂的手腕部分与5自由度电机安装套采用螺钉连接的方式,从而使4自由度电机的动力可以传递到手腕部分,带动手腕前部的旋转。5自由度电机安装在相应的电机安装套中,5自由度电机的输出轴与锥齿轮1采用键连接,锥齿轮2与锥齿轮1为1∶1传动。6自由度关节的相应部件安装在6自由度电机安装套之上,6自由度电机安装套与锥齿轮2通过键连接固定,从而使5自由度电机的动力可以传递到手腕的前部,带动手腕前部的俯仰。
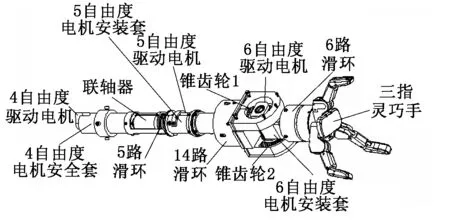
图4 4轴、5轴和6轴的结构示意图
1.3 连续旋转自由度走线的处理
为增强机械臂的工作能力,关节4与关节6可以实现连续旋转,为避免导线由于连续旋转而造成的拧断现象,使用了滑环结构。一对滑环结构由两片组成(称之为上片和下片),一片具有滑道,一片具有触点,通过触点与滑道的摩擦接触传递信号[9],本文采用的滑环可以通过低于10 A的电流。机械臂共有3处采用滑环结构,其14路滑环结构如图5所示。其中,夹持器的控制线需要滑环过渡,预留了6路信号;6自由度电机与夹持器的控制线需要滑环过渡,预留了14路信号;5自由度电机的控制线需要滑环过渡,预留了5路信号。
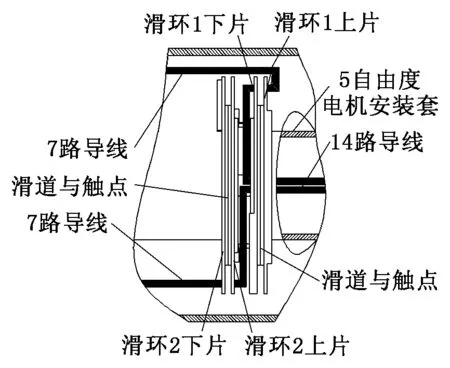
图5 14路滑环结构图
2 控制系统设计
机械臂控制系统结构框图如图6所示。上位机采用PC机或工控机,下位机采用美国Delta Tau公司PMAC多轴运动控制器,其本质上是一台基于Motorola DSP芯片、具有独立内存、独立运算操作能力、实时的、多任务的计算机,满足作为机械臂运动控制器的要求[10]。PMAC卡与PC机通过网卡通讯,PC端上运行系统控制软件,PMAC卡接收上位机指令进行相关算法的运算,最终输出控制信号给驱动器,驱动器驱动电机运动,电机编码器的反馈信号回馈给PMAC卡,形成闭环回路。PMAC卡将电机位置信息反馈给PC端,在PC端上显示。
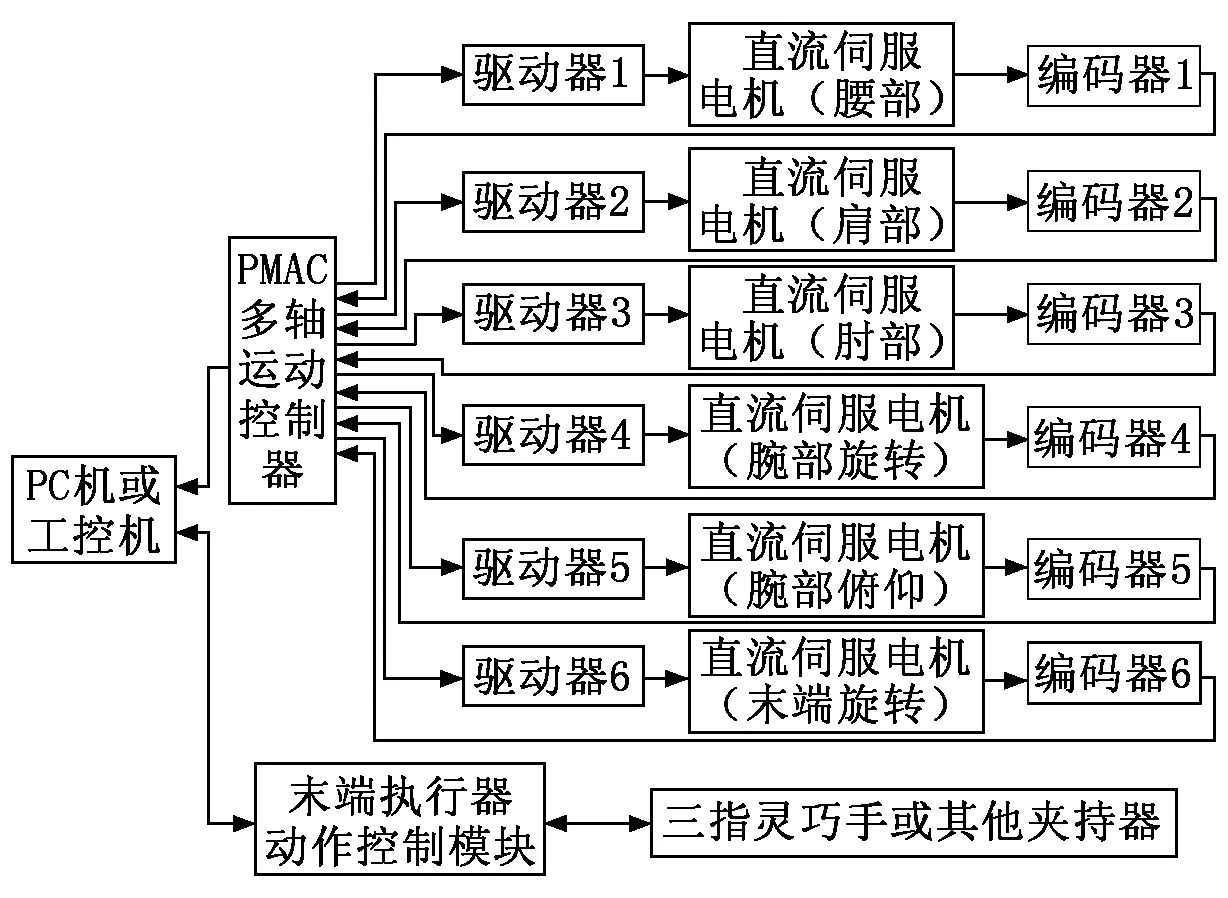
图6 机械臂控制系统结构框图
机械臂预计搭配的三指灵巧手有独立的控制模块,三指灵巧手直接与其控制模块通讯,控制模块与PC机通讯,PC机端运行三指灵巧手的控制程序。
3 实验验证
对机械臂本体及控制系统进行了搭建,如图7所示。记初始位置为0°,在PC端输入各轴的运动指令,即相应的工作范围角度,控制各关节运动到极限位置。共进行3次实验,3次实验数据见表1。
实验结果表明:各轴的运动范围均可以达到设计的要求,特别是第4轴与第6轴分别从初始位置正转10圈并反转10圈,运转良好,信号稳定、连续传递;编码器实际脉冲数与编码器指令脉冲数的误差很小,最大误差为0.09%,可以认为满足工程需要。

表1 机械臂工作范围验证数据

图7 六自由度串联机械臂
4 结语
本文设计的六自由度机械臂的实验结果表明:传动方案合理可行,蜗轮蜗杆机构的自锁功能方便实用,蜗轮蜗杆中心距调整结构的设计明显提高了其传递效率;4轴、5轴、6轴采用的非耦合方案降低了对加工精度的要求,更为重要的是给机械臂后续控制带来了很大的便利;滑环结构的使用可以稳定地传递控制及动力信号;基于PMAC多轴运动控制卡的控制系统具有良好的实时性与可扩展性,很好地满足了机械臂的控制要求。
[1] 梁利华,强华,郑暾.5R装夹机械臂几何参数优化设计[J].浙江工业大学学报,2014,42(4):446-462.
[2] 明添,钱瑞明.排爆机器人五自由度操作臂动力学分析[J].机械设计与制造工程,2014,43(9):13-17.
[3] 王燕,杨庆华,鲍官军,等.关节型果蔬采摘机械臂优化设计与试验[J].农业机械学报,2011,42(7):191-195.
[4] 吴瑞祥,王之栋,郭卫东,等.机械设计基础[M].第2版.北京:北京航空航天大学出版社,2005.
[5] 朱映远,倪风雷,刘宏.蜗轮蜗杆副的空间操作器应用研究[J].机械传动,2012,36(7):107-110.
[6] 毕诸明,蔡鹤皋.六自由度操作手的逆运动学问题[J].机器人,1994,16(2):92-97.
[7] 姜宏超,刘士荣,张波涛.六自由度模块化机械臂的逆运动学分析[J].浙江大学学报(工学版),2010,44(7):1348-1354.
[8] 陈明生,沙威,谢莹.六关节机械臂运动路径设计[J].数学的实践与认识,2008,36(14):103-110.
[9] 李坤芝.导电滑环技术研究[J].舰船科学技术,1994(5):56-58.
[10]刘建平.基于PMAC的六自由度关节工业机器人码垛控制系统[J].机械与电子,2013(12):48-50.
Development of A Tandem 6-DOF Robot Arm
CHEN Hao1, LI Teng-fei1, CHEN Rui2
(1. Research Institute of Robotics, Beihang University, Beijing 100191, China; 2.College of Mechanical Engineering, Chongqing University,Chongqing 400044, China)
In this paper, a tandem 6-DOF robot arm is designed, and its mechanical structure and control system are discussed in detail. Robot arm adopts the articulated structure, it works flexibly and has large operating range. A practical motion control scheme is built based on PMAC multi-axis motion controller and the control system has good performance such as real-time and scalability. The experiment results show that each joint of the developed robotic arm is working well and the control system is reliable to achieve the design goals.
6-DOF; robot arm; development; PMAC
1672- 6413(2015)06- 0014- 03
国家973计划资助项目(2012GB102006)
2015- 01- 09;
2015- 10- 08
陈浩(1989-),男,陕西榆林人,在读硕士研究生,主要研究方向:机器人技术。
TP24
A
