舰载飞行器平台惯导系统传递对准及检验方法研究
2015-12-05李双喜韩利军
李双喜 韩利军
北京航天自动控制研究所,北京100854
利用标定好的载体主惯导的信息对舰载飞行器子惯导进行传递对准是舰载飞行器机动发射的一项重要技术,它的精度与时间决定了舰载飞行器发射导航计算初始姿态的精度与准备时间。惯导系统传递对准是动基座对准的一种,是指载体航行时利用已经对准好的主惯导对安装在载体上的飞行器子惯导进行初始对准。
传递对准是用于解决舰载飞行器惯导系统在动基座条件下初始对准问题的一项技术。在传递对准过程中,需要引入舰上高精度主惯导系统的导航信息,并以此信息为基准,通过一定的机动航行,消除主、子惯导系统之间的对准误差,确定出子惯导系统的正确姿态。目前国内外对捷联惯导的传递对准研究较多[1-3],一般在地理系建立传递对准模型。
本文针对舰载飞行器平台惯导传递对准技术,在惯性坐标系建立了速度匹配、“速度+姿态”匹配卡尔曼滤波方程。考虑舰艇的摇摆运动,进行了不同机动方式下舰载飞行器平台惯导传递对准效果数学仿真,并设计了精度实时检验方法。
1 传递对准数学模型
本文使用以下几个坐标系:i 为发射惯性坐标系;b 为载体坐标系;p 为平台坐标系。
1.1 传递对准状态方程
1.1.1 速度误差方程发射惯性坐标系内的速度向量方程如式(1):

在惯导计算机中计算的载体速度向量微分方程为[4-5]:
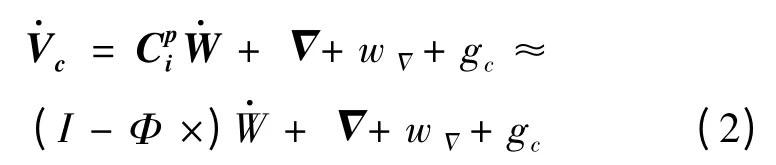
式(2)与(1)相减可以得到:

式中,δg 为引力计算误差。假设地球为匀质圆球,则可认为为引力系数,R 为子惯导系统所处位置的地心向量,以δg 近似表示R 的计算误差δR 引起的引力计算误差,其它由模型不准确造成的引力误差认为是白噪声并考虑在wΔ中,则:
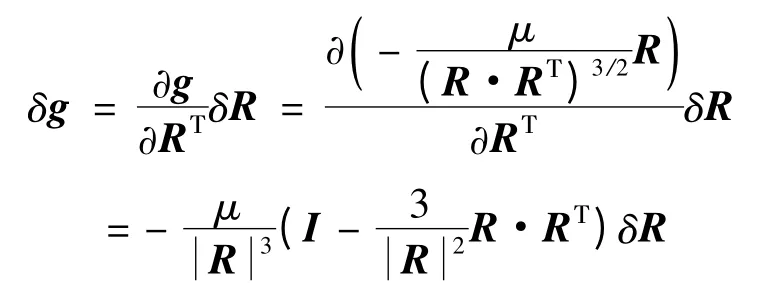
综上,可得主子惯导系统速度误差方程

1.1.2 位置误差方程
1.1.3 平台失准角误差方程

其中,ε,wε分别为陀螺仪的常值漂移和随机漂移。
1.2 卡尔曼滤波器设计
1.2.1 状态方程
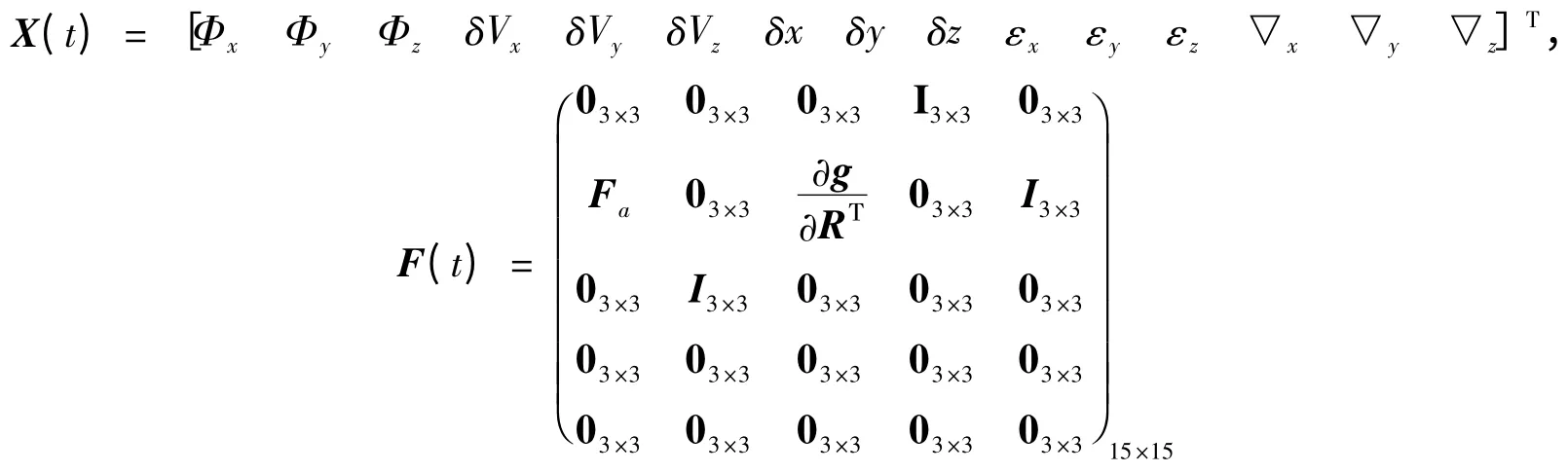
综合速度误差、位置误差和平台失准角误差方程,可得如下系统状态方程:

状态变量为
1.2.2 速度匹配量测方程
取速度误差作为观测量,量测方程如下:

其中,H = (03×3I3×303×9),V(t)为量测噪声。
1.2.3 “速度+姿态”匹配量测方程
取平台误差角和速度误差作为观测量,量测方程如下:

2 数学仿真
2.1 运动状态
(1)飞行器初始参数
俯仰角φ=89°,偏航角ψ=0°,滚动角γ=0°。
(2)舰艇摇摆参数
2)偏航运动参数
3)纵摇运动参数
(3)运动参数
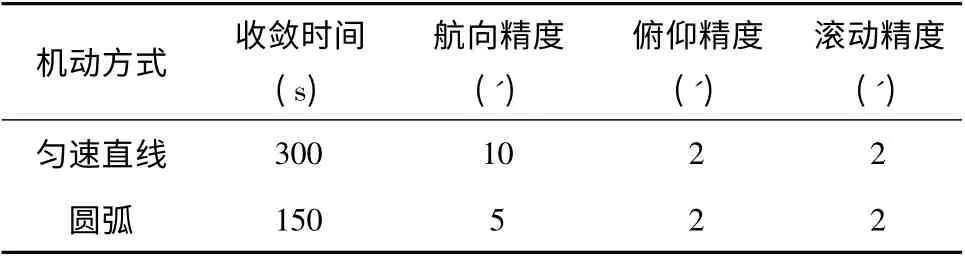
1)直线运动:以一定的速度,沿北向匀速直线航行。
2)圆弧机动:以一定的初速度,100 m 为半径做圆弧运动。
2.2 惯性器件精度
假设子惯导陀螺常值漂移为0.005(°)/s,加速度计零偏10-5g0。
2.3 仿真结果
(1)速度匹配
?
(2)“速度+姿态”匹配

?
3 精度检验方法
由于传递对准系统精度受到多方面因素的影响,还需要设计精度检验方法对传递对准在实际工作情况下达到的精度进行验证。方法如下:
1)将主惯导、子平台惯性导航系统与双星定姿系统(即利用2个按一定角度安装的星敏器同时测量2 颗恒星,从而解算出子平台惯性导航系统的姿态信息)固定安装在钢板上,钢板固定在试验船上;
2)主惯导对准后,开始导航解算。试验船以预定航行速度开始行驶;
3)试验船行驶过程中,子平台惯性导航系统进行快速粗调平、方位粗对准;
4)试验船行驶过程中,子平台惯性导航系统利用主惯导传递的信息进行传递对准;
5)双星定姿系统通过测量恒星,实时输出子平台惯性导航系统的姿态信息;
6)传递对准完成后,利用双星定姿系统对传递对准的精度进行评估。

图1 精度检验方法框图
4 结论
采用速度匹配方法时,舰艇的机动可以有效提高对准的精度并缩短对准时间。采用“速度+ 姿态”匹配方法时,不需要舰艇做特殊的机动,就可以在较短的时间内达到较高的精度。但是实际对准时,舰艇的形变及振动可能对对准精度造成影响,还需要进行大量的试验来对对准方法进行检验。
[1]王司,邓正龙. 惯导系统动基座传递对准技术综述[J]. 中 国 惯 性 技 术 学 报,2003,11 (2):61-67.(WANG Si,DENG Zhenglong. Technique Review of Transfer Alignment for Inertial Navigation Systems on Moving Base[J]. Journal of Chinese Inertial Technology,2003,11(2):61-67.)
[2]郝曙光,张洪钺.几种传递对准方程的比较研究[J].惯性技术学报,2003,11(6):53-63. (HAO Shuguang,ZHANG Hongyue. Comparison of Different Transfer Alignment Equations[J].Journal of Chinese Inertial Technology,2003,11(6):53-63.)
[3]陈建华,洪贞启.传递对准技术研究现状及其在潜射导弹中的应用展望[J]. 飞航导弹,2011,9(9):50-53.(CHEN Jianhua,HONG Zhenqi. The Research Status of Transfer Alignment and Prospects of Appling in Submarine-based Missile[J].Aerodynamic Missile Journal,2011,9(9):50-53.)
[4]王东升,艾光彬,吕善民,张玉龙,赵爱武. 舰载平台式惯导系统的传递对准[J]. 中国惯性技术学报,2009,17(1):24-27. (WANG Dongsheng,AI Guangbin,LV Shanmin,ZHANG Yulong,ZHAO Aiwu.Transfer Alignment for Shipboard Platform Inertial Navigation System[J]. Journal of Chinese Inertial Technology,2009,17(1):24-27.)
[5]韩海军,陈家斌.舰船在风浪干扰下的快速传递对准技术研究[J].北京理工大学学报,2004,24(10):894-896. (HAN Haijun,CHEN Jiabin. A Study on the Rapid Transfer Alignment in Marine Environment[J].Transactions of Bejing Institute of Technology,2004,24(10):894-896.)
