(2-UPS+U)&R串并混联机构工作空间分析
2015-12-05王雷
王 雷
(潞安职业技术学院 机电工程系,山西 长治 046204)
(2-UPS+U)&R串并混联机构工作空间分析
王 雷
(潞安职业技术学院 机电工程系,山西 长治 046204)
提出了一种新型串并混联机器人,该机器人腿部采用了3自由度(2-UPS+U)&R串并混联机构,具有工作空间灵活、能耗低、地形适应性强等特点。同时还对(2-UPS+U)&R串并混联机构的自由度进行了分析计算,求解了该机构的工作空间,验证了该机构工作时的灵活性。
串并混联机器人;自由度;工作空间
0 引言
串联机器人工作空间大,结构简单,控制简单,但是承载能力低;并联机器人虽然有很大的承载能力,但是结构复杂,工作空间小。因此,出现了串并混联机器人,串并混联机器人很好地继承了串联和并联机器人的优点,既有很大的工作空间,又有很大的承载能力,是目前机器人发展的主流[1-2]。
1 建立坐标
本文介绍的是一种3自由度串并混联机器人,其腿部机构如图1所示,平台与小腿间采用3条运动支链相连接,其中,运动支链2和3结构相同(为UPS支链),其一端通过虎克铰与平台连接,另一端通过球副与运动支链1相连接;运动支链1其一端通过虎克铰与平台相连接,另一端通过转动副与小腿相连接。3条运动支链构成并联机构,平台、运动支链和小腿3部分构成串联结构,使得机构既有很大的承载能力又有很大的工作空间。
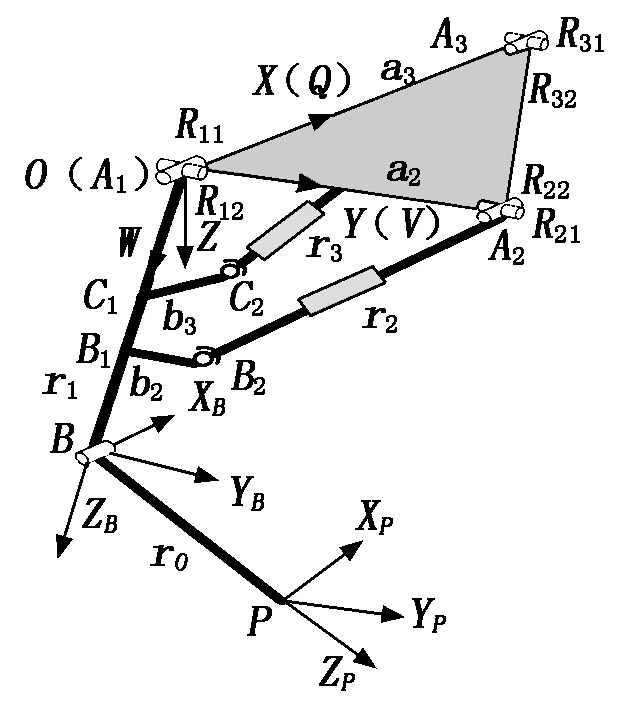
图1 串并混联机器人腿部机构简图
由图1可知,该串并混联机器人腿部机构顶部的定平台为直角三角形,其中,3个U副分布在直角三角形的3个顶点处,根据其结构特点,可建立如下坐标系:固定坐标系O-XYZ固结在定平台三角形的直角顶点处,其X轴平行于定平台直角边A1A2方向,固定坐标系的Z轴垂直于定平台,且向下为正方向,固定坐标系的Y轴方向根据右手法则确定;动坐标系A1-QVW固结在大腿上,其原点A1位于U支链虎克铰两转动轴线的交点处,其Q轴与U支链虎克铰内圈转动轴线重合,W轴沿大腿A1B方向,且向下为正方向,V轴的方向根据右手法则确定;动坐标系B-XBYBZB固结在小腿上,其原点位于U支链轴线与小腿的交点处,XB轴沿C1C2方向,ZB轴沿大腿A1B方向,且向下为正方向,YB轴的方向根据右手法则确定;动坐标系P-XPYPZP的原点位于小腿足端点P处,其XP轴与XB轴平行,ZP轴的方向沿小腿BP,且向下为正方向,YP轴的方向根据右手法则确定。
2 自由度
基于修正的Kutzbach-Grübler公式,采用约束螺旋的自由度分析方法[3],求解该串并混联机器人机构的自由度,修正的Kutzbach-Grübler公式为:

(1)
其中:M为机构的自由度数;d为机构的阶数;n为构件的数目;g为运动副的数目;fi为第i个运动副的自由度数;v为机构的冗余约束数;ζ为机构的局部自由度数。
根据螺旋理论[4]可知,UPS支链本身具有6个自由度,所以UPS支链并不对空间串并混联机构进行约束,为无约束支链,而本课题所设计的(2-UPS+U)&R串并混联腿部机构含有两条UPS支链,采用螺旋理论对该腿部机构进行自由度分析时可以不对其进行分析。因此,只需利用螺旋理论对该串并混联机器人的大腿U支链与小腿R支链串联的机构进行分析,通过腿部机构各运动副的螺旋求解其约束螺旋,即可求解出该串并混联机器人腿部机构的公共约束数、冗余约束数和自由度数及类型。
如图1所示,在定平台固定坐标系下,腿部的大腿机构和定平台之间的虎克铰相当于两个转动副,大腿机构与小腿机构之间的转动副具有一个螺旋,可以得到腿部机构的约束螺旋系为:
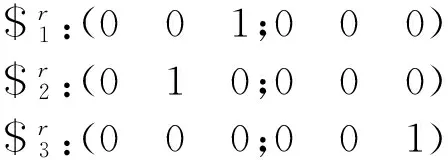
(2)
在该串并混联机器人的腿部机构中,腿部机构的阶数d=6,其构件数n=7,运动副数g=8,所有运动副具有的自由度数之和为∑fi=15,腿部机构不存在冗余约束和局部自由度,故v=ζ=0,将腿部机构这些参数代入自由度计算公式(1)中,即可求得该串并混联机器人腿部机构的自由度为:
M=3.
(3)
由上述的运动螺旋和约束螺旋分析可得:该串并混联机器人腿部机构具有绕X轴转动、绕Y轴转动和沿Z轴移动共3个自由度。
3 工作空间
在求解串并混联腿部机构工作空间时,由于腿部机构包含虎克铰、球铰等运动副,因此受这些运动副和腿部机构各构件长度的限制,腿部机构只能在一定的范围内运动。因此,要想求解腿部机构的工作空间,首先需要确定腿部机构各影响因素的限制条件。
3.1 各输入构件的杆长约束
腿部机构的输入构件杆长在一定的范围内变化,当某构件的杆长达到其临界值时,腿部机构末端所设定的参考点同时也就到达了该腿部机构工作空间的边界。设输入构件杆长的最小和最大值分别为lmin、lmax,则腿部各输入构件杆长li需满足的约束条件为:
lmin≤li≤lmax.
(4)
3.2 虎克铰和球铰的转角约束
在腿部机构的某一姿态下,可求得该腿部机构各虎克铰的转角δi,而最大许用转角δmax由虎克铰的结构决定。则腿部机构的虎克转角δi需满足的约束条件为:
δi≤δmax.
(5)
球铰链由于其自身的结构特点,其转角范围也被限制在一定范围内,设qi为球铰链座与大腿分支部分的法向量,lli为UPS支链连杆的向量,则球铰链的结构转角ηi为:

(6)
其中:║qi║、║lli║分别为这两个向量的矩阵范数。
而球铰最大许用转角ηmax由球铰结构决定,则球铰链转角的转动条件为:
0≤ηi≤ηmax.
(7)
3.3 构件约束限制
腿部机构的构件采用宽和高均为d的均匀长方体形杆件,设定腿部机构各构件之间的最短距离为dij,那么腿部机构各构件避免干涉的条件为:
dij≥d.
(8)
(2-UPS+U)&R串并混联机器人腿部机构的工作空间为其末端的运动范围,也就是其足端点P所能达到的所有点的集合。本节将运用三维球坐标搜索方法,利用MATLAB软件进行编程,通过循环函数使搜索角度θ、φ以及搜索半径ρ依次增加,并根据腿部机构的约束条件得到工作空间边界面上的点,将搜索到的点连成面即为所求工作空间的内、外表面,其内、外表面的交集即为(2-UPS+U)&R串并混联机构的工作空间,如图2所示。
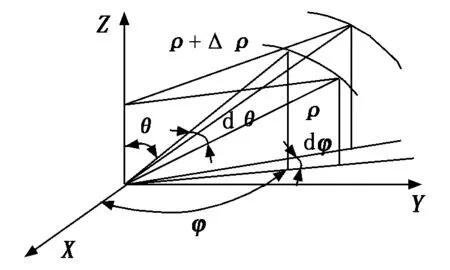
图2 三维球坐标搜索
根据(2-UPS+U)&R串并混联机器人所设定的尺寸参数,按照上述的球坐标搜索法,利用MATLAB软件进行编程,求解并绘制出该机器人腿部机构末端的工作空间三维图及其在XOY平面的投影,分别如图3(a)和图3(b)所示。
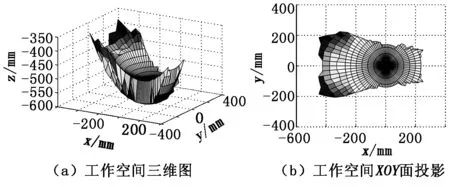
图3 腿部工作空间三维图及XOY平面内投影
由图3(a)可知,该工作空间总体上呈锥体,且沿YOZ平面对称,即腿部机构可沿其两侧摆动,其内表面由两个凹弧面组成,外表面也由两个凹弧面组成。腿部机构的工作空间在Z轴方向上的范围大约是-600 mm~-300 mm,X轴方向上的范围大约是-300 mm~+300 mm,Y轴方向上的范围大约是-200 mm~+200 mm。此外可以看出,腿部机构的工作空间较大,空间内部连续性比较好,能够满足(2-UPS+U)&R串并混联机器人腿部机构的运动要求。
本文还利用几何法画出了腿部的工作空间截面图,如图4所示,与图3所示的腿部机构工作空间三维图进行对比,可知其与工作空间三维图的YOZ截面一致,从而验证了腿部机构工作空间求解的正确性。
4 结论
本文主要进行了串并混联机器人腿部机构的设计,确定了(2-UPS+U)&R串并混联腿部的结构方案。此外,建立了该机构的静坐标系和腿部各支点的动坐标系,并对该机构自由度进行了分析和求解。本文还求解了该机构的工作空间,并对工作空间进行了分析和验证。
图4 腿部机构工作空间截面图
[1] 田兴华,高峰,陈先宝,等.四足仿生机器人混联腿构型设计及比较[J].机械工程学报,2013(6):81-88.
[2] 崔国华,张艳伟,张英爽,等.六自由度串并联机械手的构型设计与运动学分析[J].农业工程学报,2010(1):155-159.
[3] 黄真孔,高跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[4] 熊有伦,刘恩沧.机器人学[M].北京:机械工业出版社,1993.
Workspace Analysis of A (2-UPS+U)&R Hybrid Robot
WANG Lei
(Lu’an Vocational & Technical College, Changzhi 046204, China)
A novel hybrid robot is proposed in this paper, to help people complete kinds of complicated tasks. The robot adopts the (2-UPS+U)&R series-parallel leg mechanism and has the characteristics of flexible working space, lower energy consumption, strong terrain adaptability, etc. The DOF of the robot is calculated, the workspace of the robot is analyzed, and the flexibility of the robot is verified.
hybrid robot; DOF; workspace
1672- 6413(2015)06- 0156- 02
2015- 10- 12;
2015- 10- 16
王雷(1985-),女,山西临猗人,助教,硕士,主要研究方向为机械设计及自动化。
TP242
A
