基于BP神经网络的图像识别跟踪技术
2015-12-04陈向奎
陈向奎,康 牧
(洛阳师范学院信息技术学院,河南 洛阳471022)
0 引 言
随着社会经济的发展,环境问题越来越突出,海洋中蕴含着各式各样的资源,如石油、天然气等,海洋成为另一个可开发空间,如何均衡有限的海洋资源与人类的关系是社会可持续发展的一个重要研究课题。
海洋环境中对船舶进行识别跟踪能够掌控船舶的安全生产和对环境的影响。自从19 世纪40年代提出关于神经元的数学模型后,人工神经网络[1]有了突飞猛进的发展,并且具有大规模并行、分布式处理、自组织、自学习的优点,从而被广泛的应用于语音识别、人脸识别、表情识别等方面[2]。本文利用BP神经网络抗干扰性强、识别精准等优点对船舶进行识别跟踪。首先获取原始图像,然后进行预处理,分别以图像的全部灰度值为训练样本和以新不变矩特征向量为样本集输入到3 层BP神经网络中,对含不同噪声均值的图像进行识别,实验结果表明以新不变矩特征向量作为样本集时抗噪能力强,识别率高。最后以新不变矩特征向量作为样本集进行目标跟踪得到跟踪误差。
1 基于BP神经网络的图像识别跟踪技术研究
1.1 基于BP神经网络的图像识别流程图
利用捕捉设备获取被识别船舶的图像,将获取到的图像进行图像处理,包括图像灰度化进行图像增强,图像阈值分割,将图像与背景进行分离,便于后续的特征提取。利用不变矩进行特征提取,优先是此方法不受位置、方位、大小的影响,提取的特征向量能稳定地反映提取目标。最后利用BP神经网络进行目标识别。
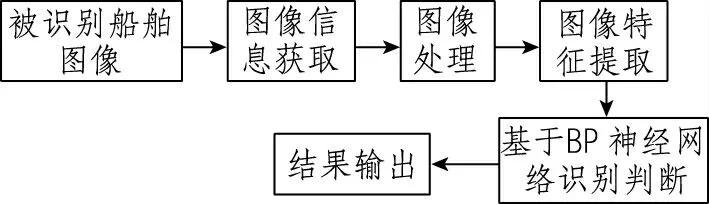
图1 识别流程图Fig.1 Recognition flowchart
1.2 基于BP神经网络的图像跟踪流程图
通过摄像头捕捉运动画面,通过监视器查看摄像机捕捉到的图像,然后通过图像增强、图像校正对采集到的图像进行噪声抑制和干扰剔除,提高图像的质量和对比度,然后进行一系列图像信号处理和模式识别得到目标的位置,对已定位的目标进行跟踪,调整其位置偏差,最后将此值传送给伺机机构进行处理,实现目标跟踪。
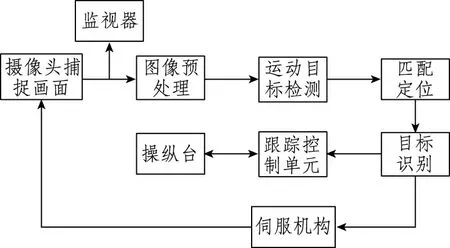
图2 跟踪流程图Fig.2 Tracking flowchart
1.3 BP神经网络结构[3]
BP神经网络结构有输入节点、输出节点和隐节点组成。本文选用仅含1 层隐节点的BP神经网络结构,如图3所示。
图3 中,i 为第i 层输入;j 为第j 层隐层;k 为第k 层输出;输入节点为图像每个特征值所对应的特征向量;输出节点为经过分类器分类后所属于的类别。
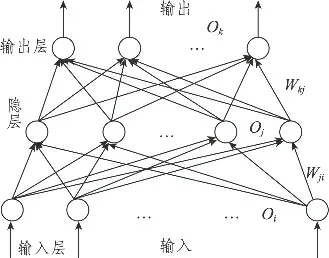
图3 BP神经网络Fig.3 BP neural network
利用BP神经网络进行图像识别跟踪实质上是信号的传播,类似于人体神经的工作进程,信号的传递归纳如图4所示。

图4 BP神经网络正反信号传播Fig.4 Positive and negative signal propagation of BP neural network
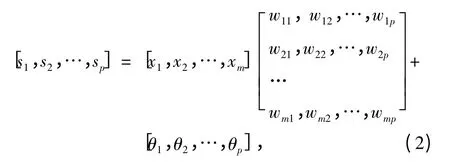
设BP神经网络中的神经元,输入层里共m个,输出层里共n个,隐层里共p个,神经网络中待训练样本个数为N 对,因此可得到神经网络中输入、输出为:
输入层输入

理想情况下输出向量

经过神经网络计算后得到的实际输出
隐层的加权向量

隐层的输出向量

输出层的加权向量

式中:wij为输入层与隐层之间的关系;vjt为隐层与输出层之间的关系;θj为隐层各节点的最大值;ri为输出层各节点的最大值。
采用Sigmoid 型函数[4]作为层与层之间的传输函数,两边求导可得:

输入与输出之间的关系为:
因此得:

故得:
第k 对样本(Xk,Yk)理想输出值与实际输出值之间的差为:
差值总和为:

输出的校正误差为:

由式(1)知:

隐层的校正误差为:

全局误差对输入层和隐层连接权和最大值的负梯度为:
根据梯度下降原则,得:

式中:0 < α < 1,0 < β < 1;i=1,2,…,m;t=1,2,…,n;j=1,2,…,p。
从而得到调整后的输入层和隐层连接权和最大值:
因而,通过上述推理得到BP神经网络的训练过程如下:
1)初始化网络参数,即为wij,vjt,θj,rt赋予初值。
2)在输入层输入需要识别的样本(X1,Y1)。
3)通过输入样本、输入层与隐层之间的关系以及最大值计算出隐层的输出值:bt=f(st),其中st=+ θi,j=1,2,…,p。
4)计算输出层的输出:ot=f(lt),其中lt=+ ri,t=1,2,…,n。
5)计算输出层各个节点之间的校正差值:dt=ot·(1- ot)·(yt- ot),t=1,2,…,n。
6)计算隐层各个节点的校正差值:ej=bj·(1-bj)(1-ot)·(yt-ot)·vjt,t=1,2,…,n。
7)计算隐层到输出层的新连接值:vjt(L+ 1)=vjt(L)+ αdtbjrt(L+1)=rt(L)+ αdt。
8)计算输入层到隐层的新连接值:wij(L+1)=wij(L)+ βejxi,θj(L+1)=θj(L)+ βej。
9)然后进行下一组样本的训练,直至所有的样本训练完成,不断调整连接权值和阈值,通过输出层得到输出值。
2 实验结果
2.1 基于BP神经网络的图像识别
本文将输入的图像对为16 ×16,训练集和测试集由每幅图像总的像素向量组成。选用的神经网络由1 层输入层、1 层隐层和1 层输出层组成。输入层的节点数为16 ×16,输出节点为4,根据参考文献[5],隐层节点为11,测试不同噪声级别样本图像的识别率如表1所示。

表1 不同噪声级别样本图像的识别率Tab.1 Recognition rate of different noise
从表1 可看出,随着噪声的增大,识别率会越来越低,说明抗噪能力差。
将新不变矩特征[5]作为样本集,测试不同噪声级别样本图像的识别率如表2所示。

表2 不同噪声级别样本图像的识别率Tab.2 Recognition rate of different noise
由表1和表2对比可知,在采用3 层BP神经网络进行识别时,以新不变矩特征向量作为样本集时抗噪能力强,识别率高。
2.2 基于BP神经网络的图像跟踪
本文以新不变矩特征向量作为训练图像进行跟踪,得到的识别误差曲线如图5所示。

图5 识别误差曲线Fig.5 The recognition error curve
随着时间的增长,BP神经网络收敛,误差越来越小,跟踪效果越好。
3 结 语
本文通过对获取的原始图像分别以图像的全部灰度值为训练样本和以新不变矩特征向量为样本集输入到3 层BP神经网络中,对含不同噪声均值的图像进行识别。结果表明,以新不变矩特征向量作为样本集时抗噪能力强,识别率高。最后以新不变矩特征向量作为样本集进行目标跟踪得到跟踪误差。
[1]WANG Yong-qing.Principles and methods of artificial intelligence[M].Xi'an Jiaotong University Press,2002:385-387.
[2]RAFAEL M,ABDELLAH E F.Multilayer neural networks:an experimental evaluation of on-line training methods[J].Computers & Operations Research,2004,31:1491-1513.
[3]JIAO Li-cheng.Neural network theory[M].Xidian University Press,1995.
[4]ZHAO Kuang-suo,LIN Jun-qing.Recognition of ship noise based on neural network[J].Ship Science and Technology,1995,11(6):32-36.
[5]CHANG Hua.Research on underwater target recognition based on BP neural networks[D].Northeastern University,2010.
