舰载多传感器资源调度系统设计
2015-12-04王发龙
王发龙,姜 宁,于 雷
(1.海军大连舰艇学院,辽宁 大连116018;2.海军航空兵学院,辽宁 葫芦岛125001;3.中国人民解放军91278 部队,辽宁 大连116041)
1 多传感器资源调度问题描述
在实际的传感器使用中,常常面临着以下问题:一是不同类型的传感器具备不同的任务保障能力,适用于不同的作战任务;二是复杂的、高动态的战场环境,对传感器性能发挥产生强不确定性;三是有限的传感器资源,只能为有限的作战任务提供保障服务;四是随机发生的传感器故障或干扰,可能导致作战任务无法执行或失败[1]。另外,单一传感器由于工作方式、覆盖范围、探测精度和辐射功率有限,对多目标的探测、识别和跟踪效果有限。因此,为了更好地保障作战任务的完成,必须对舰载多传感器资源进行合理的使用规划和统一调度,实现信息的综合利用和传感器能力互补,充分发挥出舰载多传感器系统的整体作战效能[2]。
多传感器资源调度就是利用有限的传感器资源,实现对作战空域的多批目标进行扫描、侦察、识别、跟踪等,以获取目标的各种具体指标特性的最优度量值,以及最佳的干扰样式和参数等,并根据调度最优准则对传感器资源进行合理科学的分配[3-4]。
2 舰载多传感器资源规划
2.1 传感器性能及约束条件
对多传感器资源进行调度之前必须获知各个传感器资源性能,分析和梳理出传感器在哪些方面可进行管理和调度,主要包括:
1)传感器的工作频域。主要弄清楚系统内各传感器工作频率范围,以及某一个传感器工作频率的频段(频点)划分。如不同功能(搜索、跟踪)的舰载雷达可能的工作频段有米波段、L、S、C、X等;红外跟踪器、电视跟踪器,导弹遥控指令收发系统,电子侦察系统,通信侦察系统和有源干扰系统的工作频段。
2)传感器的工作空域。主要弄清楚系统内各传感器工作空域,包括传感器的有效作用距离(最大工作距离、最小工作距离),俯仰角范围等。如对空雷达、对海雷达和火控雷达的工作空域存在着一定的差异,选择不同的量程对应不同距离的目标。
3)传感器的工作模式。主要弄清楚具有不同工作模式的传感器各工作模式所对应的功能和参数设置等。如某些雷达具有被动、主动和低截获概率工作模式等,新型雷达电子战一体化系统具有雷达和电子战工作模式等。
4)传感器的资源特性。主要弄清楚传感器的测量精度、数据率、通道数、目标容量、总功率以及发射功率的可变范围等。
5)传感器的隶属性。所谓传感器隶属性,就是武器系统与传感器的对应关系。例如,对于某一武器系统来说,只有某唯一指定传感器能为其提供信息保障,那么我们称这个传感器为这个武器系统的专属传感器;如果有2 种或2 种以上的传感器可以为某一武器系统提供信息保障,但是对这2 种传感器选择却有优先顺序,优先选择的传感器为主传感器,另外的成为兼顾传感器,调度过程中若主传感器资源受限,调用兼顾传感器进行信息保障。
2.2 作战任务与传感器使用规划
以水面舰艇遂行对空作战任务为例,将对空作战区域划分为远中近三层防区,远层防区为远程对空警戒区域,中层防区为中程对空交战区域,近层防区为近程对空交战区域,层区划分和主要作战任务如图1所示。另外,3个层区中还涉及方位范围划分、仰角范围划分等。

图1 对空作战区域划分和传感器武器使用示意图Fig.1 Illustration of the combat area division and the main operational task
1)目标探测任务。主要利用舰载雷达对指定空域(全空域、威胁扇面、海面)进行搜索跟踪,尽早发现来袭目标。
2)电子侦察任务。主要利用电子侦察系统、通信侦察系统以及雷达系统(被动工作方式)对作战空域指定频率范围进行侦察,尽早发现敌通信信号(短波、超短波、数据链等)、雷达辐射源信号(机载和舰载搜索警戒雷达、跟踪雷达、火控雷达,以及导弹末制导雷达),为综合态势和威胁预估提供信息。
3)目标识别任务。主要利用敌我识别系统、电子侦察系统、雷达、红外跟踪系统、电视跟踪系统等,对已发现或疑似存在目标(或假目标)进行身份识别(敌方、我方、友方)和属性识别(飞机、舰艇、导弹等)。
4)目标跟踪任务。主要利用雷达(米波段、S波段、X 波段、雷达电子战一体化设备)、红外跟踪系统、电视跟踪系统等,对指定目标进行稳定跟踪,为武器打击提供信息保障(精确跟踪)。
5)电子干扰任务。主要利用电子侦察系统、电子干扰系统、通信干扰系统等,对敌搜索雷达、火控雷达、导弹末制导雷达、指挥系统、通信网、指挥网等采取电子干扰和反干扰措施。
2.3 传感器使用策略规划
只有对传感器使用策略进行准确详细的规划,才能围绕使用策略采取优化措施和方法,提高传感器工作效能。舰载多传感器使用策略规划包含传感器单独使用策略规划和传感器协同使用策略规划两部分。
1)传感器单独使用策略规划。指的是找出系统中可独立保障某一作战任务的传感器及其使用策略。如,敌我识别系统可独立保障目标敌我属性的判断任务;某些雷达可独立完成某一空域目标的搜索和跟踪任务;电子侦察系统可独立完成某一频段电磁信号的侦察告警和威胁判断等任务。使用策略规划主要指根据传感器在不同条件下的性能指标,对传感器的使用进行预处理。如根据各雷达在不同距离、不同高度、不同方位上探测威力(对目标的搜索概率值、跟踪精度等)不同,预先对系统内各雷达的使用范围和时机进行规划,构建完整的远中近衔接紧密,高中低搭配合理的雷达探测体系;电子干扰系统有效干扰区间;
2)传感器协同使用策略规划。指的是找出系统中可按指定的时间顺序依次或同时完成某一作战任务的2 种或2 种以上传感器组合及其使用策略。传感器协同使用策略规划最重要的内容是寻求传感器之间是否存在协同机会,以及协同使用是否会提高传感器的效能值。如,传感器协同工作,是否会提高探测空域覆盖范围?是否会提高对目标发现概率?是否会提高目标跟踪精度?是否会提高目标识别率等。
协同策略规划可从任务需求分析和传感器互补2个方面进行:
①从任务需求分析上,主要体现在作战任务对应的目标类型、空域范围、识别正确率、跟踪精度、抗干扰能力等方面。
②从传感器互补性上,则主要体现在传感器工作频段、工作模式、空域覆盖范围、环境适应能力等方面。例如,为了减少传感器之间的相互干扰,传感器大都选择在不同的工作波段;若不可避免地选择相同的工作波段,则应选择不同的工作方式,即一个为主动式,一个被动式;为缩短雷达搜索时间,可选择电子侦察系统引导雷达对指定方位进行目标搜索和跟踪[4]。
3 舰载多传感器资源调度模型
设舰载传感器系统的传感器论域为U={Ui},i=1,2,…,n,n 为传感器(传感器组)数目,作战任务论域为V={Vj},j=1,2,…,m,m 为任务数量。
3.1 “传感器-任务”效能因子
定义rij为传感器Ui对任务Vj的效能因子。rij表示传感器Ui对任务Vj进行保障时,传感器Ui对系统所做贡献值,它是任务优先级threat(Vj)与传感器与任务的匹配度match(Ui)的函数。效能因子rij的确定是多传感器资源分配的关键,由rij组成效能矩阵R,既是多传感器分配的基础[6]。

其中threat(Vj)为任务Vj的优先级,它与作战任务所对应目标的威胁等级和任务的紧迫程度有关。例如,对于同一传感器,它所保障的任务优先级越高,对系统的贡献值就越大,则效能因子就越大;反之,越小。可见rij与threat(Vj)成正比关系。
match(Ui)为传感器Ui保障作战任务Vj的匹配度。对于不同的传感器与任务,匹配度的计算方法也会不同。它可以是传感器工作覆盖范围与任务要求的范围大小的比例关系;也可以是传感器获取目标特征参数精度与系统需求的参数精度比例关系等,应具体问题具体分析。例如,有的传感器获取目标特征参数精度很高,而当系统对这些特征参数精确要求不高时,若将此传感器用于此目标,必然造成资源浪费;若传感器获取目标特征参数精度较低,而系统对这些特征参数精度要求较高时,若将此传感器用于此目标,则会影响系统性能,甚至导致任务的失败。设传感器测得各参数精度为A=(α1d,α2d,…,αbd),系统对各参数精度要求为B=(α1s,α2s,…,αbs),则

当match(Ui)=1 时,说明传感器与任务取得最佳匹配,否则,或造成资源浪费,或无法满足需求。
3.2 多传感器资源调度模型
舰载多传感器资源调度是以满足任务需求为目的,根据“传感器-任务”效能因子和传感器性能约束,对所有任务与传感器策略进行优化匹配,对传感器资源进行合理调度,充分发挥传感器最佳效能,从获得最优的系统综合效能。建立资源调度模型如下:
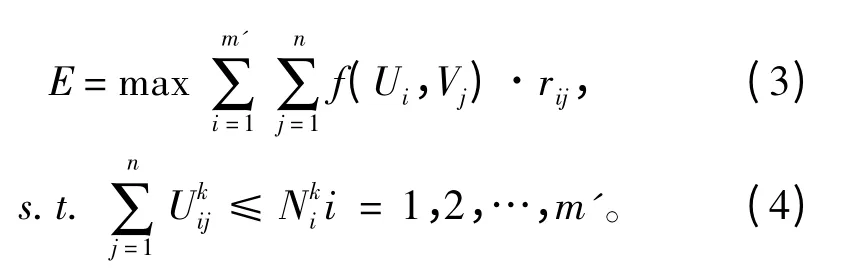
式中:k 为传感器Ui的某种工作模式;为Ui在工作模式k下的最大任务容量。
4 资源调度系统功能设计
舰载多传感器资源调度系统主要功能:一是解决何时选用何种传感器提供服务保障;二是解决何时选择2 种或2 种以上传感器进行协同工作;三是指定传感器的工作状态、工作时机、工作模式以及工作参数等;四是对传感器资源使用情况进行实时统计和传感器能力预估。系统功能示意图如图2所示。
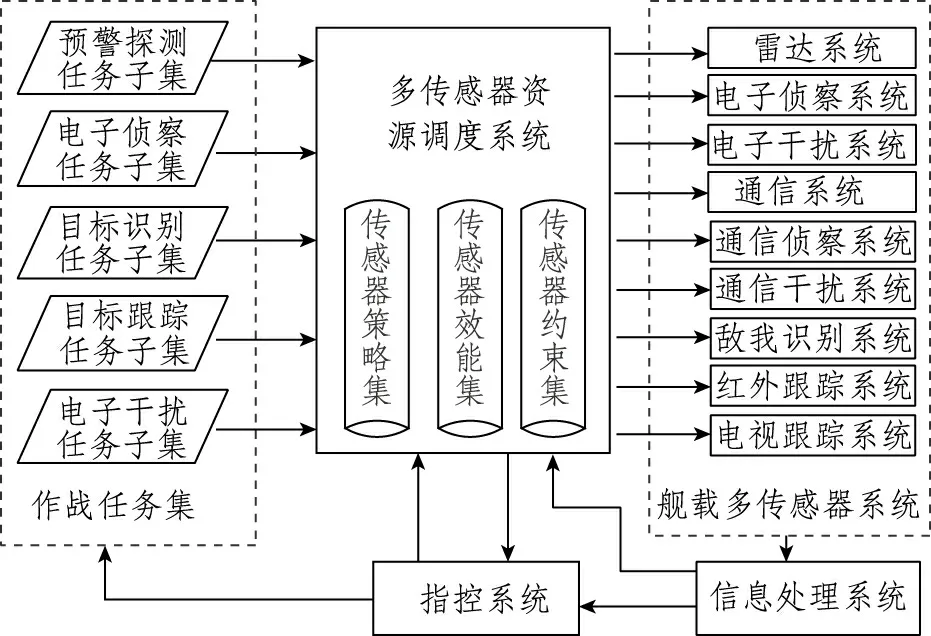
图2 舰载多传感器资源调度系统示意图Fig.2 Illustration of the shipboard multi-sensor resource scheduling system
作为资源调度系统,首先要确定系统的输入和输出变量,以及系统决策机制。
4.1 系统输入变量
系统的输入变量是水面舰艇遂行作战任务过程中各种作战任务的集合T。设Tyj为预警探测任务子集,Tyj={Tyj1,Tyj2,…,TyjE};Tzc为电子侦察任务子集,Tzc={Tzc1,Tzc2,…,TzcF};Tsb为目标识别任务子集,Tsb={Tsb1,Tsb2,…,TsbG};Tgz为目标跟踪任务子集,Tgz={Tgz1,Tgz2,…,TgzH};Tgr为电子干扰任务子集,Tgr={Tgr1,Tgr2,…,TgrI};则作战任务集T={T1,T2,…,TN},Ti∈(Tyj∪Tzc∪Tsb∪Tgz∪Tgr),N=E+ F+ G+ H+ I,N 为作战任务集中任务总数等于任务子集任务数之和。
在资源调度前,系统需要对作战任务集T 中的作战任务进行优先级排序。
4.2 系统决策机制
系统决策机制就是根据传感器策略集、传感器约束集和传感器效能集,通过查询机制,为任务集中的每个任务安排传感器使用策略,并对传感器(传感器组)工作时序、工作模式、工作参数等进行管理,以便及时获取和提供任务所需的各种信息。具体步骤为:第1 步,查询传感器策略集中满足任务集中每个任务需求的传感器(传感器组)策略,可能存在一个或多个策略,生成任务与传感器策略的对应关系图;第2 步,查询传感器资源约束集,查看满足任务需求传感器策略对应的传感器资源剩余情况、使用情况和约束条件,判断哪几个传感器策略可用;第3步,计算可用传感器策略对任务的贡献度大小,也就是“传感器—任务”的效能值,并进行排序和选择优化;第4 步,综合分析所有作战任务和传感器策略,在保证系统获取最大作战效能的前提下,为每个作战任务安排最优的传感器策略,生成具体的传感器工作指令。图3所示为系统资源调度流程图。
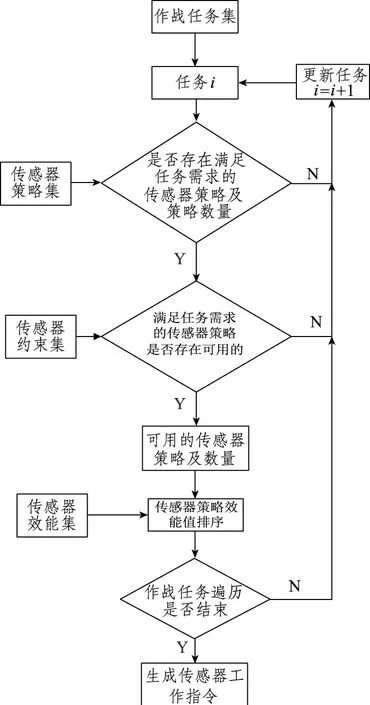
图3 系统资源调度流程图Fig.3 The flow chart of system resource scheduling
4.3 系统输出变量
系统输出变量,就是根据最终的作战任务与传感器策略的对应关系,系统将给出每个传感器工作的时间、模式、空间范围、频率、功率,以及传感器组合协同工作样式(先后顺序工作、同时工作、交接、引导)等具体参数指令,进而控制舰载多传感器系统按指令协调统一工作。对目标探测任务来说,指定了传感器工作的空域范围φ=[α,h,d](方位区间α,高度区间h,距离区间d);对于电子侦察任务来说,指定了传感器工作的空域和频率范围;对于目标识别任务来说,指定了传感器工作内容,如目标身份或目标属性的判断;对于目标跟踪任务来说,指定了传感器获取目标参数的种类和精度,如目标航向、速度、高度、距离以及数据率等信息;对于电子干扰任务来说,指定了传感器工作的功率大小、干扰样式、干扰参数等信息。
5 结 语
首先根据传感器的性能和约束条件以及作战空域的划分,对传感器的使用策略进行合理规划,生成传感器策略集。其次计算“传感器-任务”效能因子,生成“传感器-任务”效能集。最后根据统的输入变量、输出变量,制订了资源调度的查询机制和决策机制。从而对舰载多传感器资源调度系统进行了初步设计。需要下一步深入研究的问题有:一是传感器协同工作机制与融合算法研究;二是不同“传感器-任务”效能因子的计算参数指标和计算方法研究等。
[1]胡笑旋,张强.多传感器协同管理机制研究[C]//中国仪器仪表学会第九届青年学术会议论文集,北京,2007.
[2]李东伟,王明宇,万鹏飞,等.多传感器协同管理技术分析[J].飞航导弹,2011(7):77-80.
[3]陈继军.多传感器管理及信息融合[D].西安:西北工业大学,2002.
[4]HUGHES P,CHOE J.Overview of advanced multifunction RF system(AMRFS)[C]//Proc.IEEE Int.Conf.on Phased Array Systems and Technology,Dana Point.CA,2000:21-24.
[5]周开利,陶然,王越,等.多传感器ATR 系统中的传感器选配[J].系统工程与电子技术,1999,21(12):57-59.ZHOU Kai-li,TAO Ran,WANG Yue,et al.The sensor selection for multi-sensor ATR system [J].Systems Engineering and Electronics,1999,21(12):57-59.
[6]朱斯平.战场多传感器管理系统研究[D].南京:电子科技大学,2011.
