一种采用陷波滤波器的超前角弱磁控制算法
2015-12-02于家斌王小艺许继平秦晓飞郑军
于家斌, 王小艺, 许继平, 秦晓飞, 郑军
(1.北京工商大学计算机与信息工程学院,北京 100048;2.上海理工大学光电信息与计算机工程学院,上海 200093;3中国科学院自动化研究所,北京 100190)
一种采用陷波滤波器的超前角弱磁控制算法
于家斌1, 王小艺1, 许继平1, 秦晓飞2, 郑军3
(1.北京工商大学计算机与信息工程学院,北京 100048;2.上海理工大学光电信息与计算机工程学院,上海 200093;3中国科学院自动化研究所,北京 100190)
针对永磁同步电主轴在弱磁阶段,当采用SVPWM过调制控制时稳态速度产生波动的现象,在分析超前角弱磁控制算法的基础上,将主要原因归结为SVPWM过调制引起逆变器输出电压的6次谐波分量通过弱磁电压闭环传导到dq轴参考电流中,造成电流环控制性能变差进而影响电主轴的速度控制性能。对此,提出一种采用陷波滤波器的超前角弱磁控制算法。此方法在弱磁电压闭环回路中设计了陷波滤波器,以滤除输入电压信号中的6次谐波分量,同时不影响其他信号分量。实验结果表明,加入陷波滤波器之后,弱磁阶段的输出电压、电流与速度信号中的6次谐波分量明显地减小,其波形得到了显著改善,从而有效地提高了电主轴的弱磁调速性能。
永磁同步电主轴;弱磁控制;SVPWM过调制;6次谐波;陷波滤波器
0 引 言
高速、高精度永磁同步电主轴是高速数控机床的核心部件,在航空航天、汽车、精密仪器和模具加工等领域有着广泛的应用[1]。数控机床在进行工件加工时,不仅要求电主轴低速时输出转矩大,满足快速起动、加速等要求,还要具有良好的弱磁调速性能,能够在逆变器容量一定的情况下,具有较宽的调速范围,可以高速稳定运行。
永磁同步电主轴在进行弱磁调速时,通常会采用SVPWM过调制控制[2-3],以提高逆变器输出电压的利用率。但SVPWM过调制往往会造成逆变器输出电压脉冲数下降,在一个正弦周期内斩波次数减少,输出电压低次谐波分量增加。上述谐波分量通过弱磁环节的电压闭环回路,使电流环的输入给定迭加一定频率的交流信号,会导致电流环正反馈情况的出现,从而引起电流振荡,甚至造成系统不稳定,使电主轴弱磁阶段的速度控制能力严重下降。
为了提高永磁同步电主轴的弱磁调速性能,国内外学者分别提出了直接转矩控制法[4],基于瞬时功率弱磁控制法[5],自适应弱磁控制法[6]等,但这些方法都较为复杂,实现困难。在此基础上,一些学者又提出了便于实现的改进型方法,如文献[7]提出的利用dq轴电流和电压外环输出的电压差修正电流设定值的弱磁控制算法,文献[8]提出的基于交轴电压的弱磁控制算法,文献[9]提出的超前角弱磁控制算法等。然而,对于采用以上方法时如何消除SVPWM过调制引起的低次谐波分量对弱磁调速性能产生影响的相关研究却比较少。
对此,本文在超前角弱磁控制算法的基础上,提出在弱磁电压闭环回路中设计一个陷波滤波器的方法,用以滤除输入电压信号中的6次谐波分量,同时不影响其他频率的信号分量。实验结果验证了本文提出算法的正确性和有效性。
1 永磁同步电主轴数学模型
dq轴系下表贴式永磁同步电主轴定子电压方程:
式中:Ld和Lq分别为dq轴同步电感,且Ld=Lq。Rs为定子相电阻,ωr为转子的电角速度,ψf为转子永磁体励磁磁场的基波磁链。
当电主轴高速稳定运行时,忽略定子压降,电压方程可以改写为:


由式(3)可以看出,由于永磁同步电主轴的励磁磁动势因永磁体产生而无法调节,当定子电压达到逆变器的输出极限时,需要通过调整d轴和q轴电流,即增加直轴去磁电流分量id来削弱转子永磁体所产生的气隙磁通,同时减小交轴电流分量iq以维持电压平衡,从而使电主轴转速ωr升高,达到弱磁升速的效果。
2 超前角弱磁控制算法
图1为超前角弱磁算法的控制框图。其基本原理为:以控制回路中电流环的输出值作为电压PI调节器的输入控制量,与给定电压Umax之间的差值通过电压PI调节器来控制电主轴定子电流矢量与q轴之间的超前角β。Umax的取值为,其中Udc为逆变器的直流母线电压。当us低于Umax时,由于饱和环节的作用,PI调节器处于正向饱和,输出电流超前角β=0,此时id=issinβ=0,电主轴运行在恒转矩区。当us高于Umax时,电压PI调节器输入为负值,PI调节器开始退出饱和,输出负的超前角β (-π/2≤β=0),产生负向d轴电流分量,电主轴进入弱磁工作区。同时对id还要采取一定的限制,使其小于电主轴最大去磁电流。
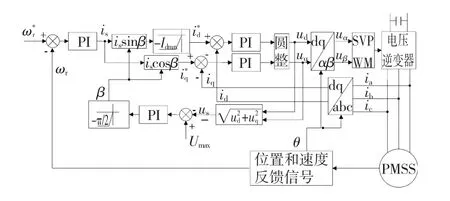
图1 超前角弱磁控制算法框图Fig.1 Block diagram of leading angle flux weakening control algorithm
当电主轴采用超前角弱磁控制算法进行弱磁调速时,为提高逆变器直流母线的电压利用率,增强其电压输出能力,减小速度响应动态过程的电流震荡,通常要采用SVPWM过调制控制策略[10]。由电压型逆变器的工作原理可知,逆变器输出电压中不包含偶次谐波和三倍频谐波。由过调制产生的电压信号中的谐波分量比例会随调制比的增加而不断升高[11-12],当逆变器输出电压为6拍波时,A相电压为:
Ua=U1cosωrt+U5cos5ωrt-U7cos7ωrt+…。(4)式中,U1为定子电压信号中的基波分量幅值,U5与U7为电压信号中的5次和7次谐波分量幅值。由于高次谐波分量幅值较小,所以电压信号中所含谐波分量主要是5次和7次谐波。
将定子电压由ABC三相轴系变换到随转子旋转的dq两相轴系中,由式(5)~式(7)可知,经Clark&Park变换,ABC三相电压的5次和7次谐波分量变为dq轴电压的6次谐波分量,也就是电流环输出的ud和uq中含有6次谐波分量。
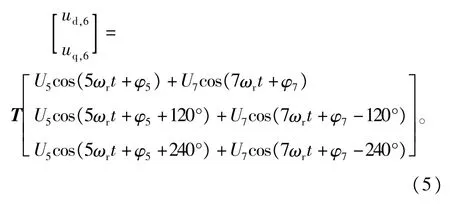
上式中的T为Clark&Park变换矩阵:
将式(6)带入式(5)可得:
本文采用了文献[13]提出的弱磁过调制控制算法,由图1可以看出,在过调制阶段,由于圆整后的ud和uq可以认为是实际施加的电压矢量,其中含有6次谐波,因此us中也包含了ud和uq中的6次谐波分量,通过弱磁电压闭环回路使电流环的输入参考电流id*和iq
*也会存在6次谐波分量。当电流闭环时,上述谐波分量可能会造成电流环正反馈情况的出现,影响电流环的控制性能,从而导致电主轴在恒功率区带载运行时,速度和转矩产生震荡,电主轴弱磁调速性能下降,严重时甚至导致系统不稳定。
由于在过调制阶段ud和uq中的6次谐波分量为谐波的主要成分,为了避免其对电流环造成影响而使电主轴的调速性能下降,同时最大化保留除6次谐波外的真实电压信号,本文在弱磁电压闭环回路中加入一个陷波滤波器以滤掉输入电压信号中的6次谐波分量,同时不影响其他频率的信号分量。本文采用全通滤波器设计陷波滤波器。
3 基于陷波滤波器的超前角弱磁控制算法
在信号处理系统中,常采用陷波滤波器来滤除信号中的一个或多个周期性干扰,同时不影响其他频率分量。陷波滤波器实际上是一种带宽很窄的带阻滤波器[14-15]。图2是陷波滤波器的原理框图。
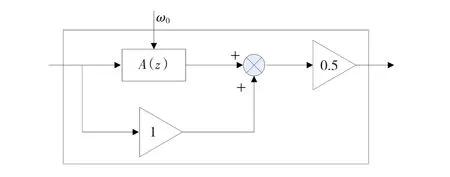
图2 陷波滤波器的原理框图Fig.2 Block diagram of notch filter
从图2可以看出,陷波滤波器由一个2阶Gray-Markel格型全通滤波器和一个加法器组成,其传递函数H(z)为:

式中,A(z)为2阶全通滤波器的传递函数:

因此根据式(8)和式(9),H(z)可以表示为:

图3为传递函数A(z)的结构图。式(9)中,k1控制着陷波滤波器的带宽系数Bw,且与极点到单位圆的距离有关,考虑到其稳定性,k1一般取常量; k2则与ω0有关,其中ω0为陷波频率,即陷波滤波器所要滤除的频率。
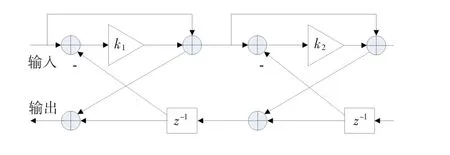
图3 传递函数A(z)的结构图Fig.3 Block diagram of transfer function A(z)
在设计陷波滤波器时为了有利于对陷波频率ω0和-3dB的衰减带宽进行单独控制,参数k1与k2在设计时要相互独立[16],如式(11)所示:
为了便于编程实现,可以令k1=R2,k2= -cosω0,设计陷波滤波器如式(12)所示:
式中,ω0为陷波频率,R2为陷波滤波器的可调参数。为满足陷波滤波器的稳定性条件,要使|k1|<1,也就是R2<1。基于陷波滤波器的超前角弱磁控制算法的原理图如图4所示。
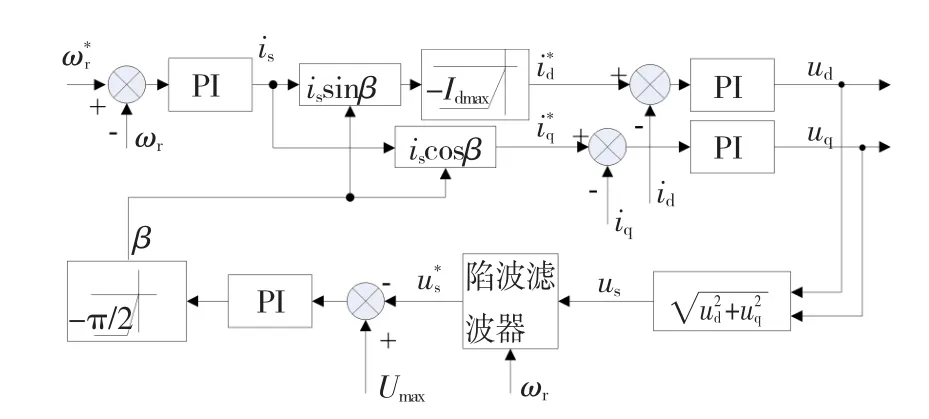
图4 基于陷波滤波器的超前角弱磁控制算法原理图Fig.4 Block diagram of leading angle flux weakening control based on notch filter
从图4可以看出,在弱磁电压环的PI调节器输入之前添加一个陷波滤波器,用以滤除SVPWM过调制引起的输入电压信号us中所含有的6次谐波分量,同时不影响其他频率的信号分量。根据式(12)来设计陷波滤波器,其中,参数k1取经验值,同时可以根据实际情况进行调整;参数k2中的陷波频率,即所要滤除的6次谐波频率ω0=6×ωr,式中ωr为电主轴的电角速度。
4 实验结果
为了验证本文提出算法的有效性,设计了基于数字信号处理器(digital signal processor,DSP)的全数字永磁同步电主轴驱动系统实验平台。DSP选用TI公司的TMS320F28335,逆变器采用INFINEON公司的FS150R120KE3,电主轴采用西安英威腾电机有限公司的HSB1500908,其主要参数:额定功率7.5 kW,额定电压310 V,额定电流19.5 A,额定转速9 000 r/min,最高转速18 000 rpm,额定转矩6 N.m,线间反电动势系数0.33 V.s/rad,极对数为2。
负载转矩TL=2 N.m,当电主轴的转速为15 000 r/min时,电主轴进入深度弱磁阶段,逆变器始终处于过调制状态,实际施加电压ud和uq由于逆变器输出能力的限制,其包含的6次谐波分量是其谐波分量的主要成分。采用本文提出的基于陷波滤波器的超前角弱磁控制算法进行实验。图5和图6分别给出了陷波滤波器输入的电压信号us与输出的电压信号us*的波形以及频谱分析。从两图频谱分析的对比可以看出,由于陷波滤波器的滤波作用,在弱磁阶段图6中us*频谱中所含的6次谐波分量相较于图5中明显地减少,滤波后电压的THD从4.91%下降到1.83%。同时,在弱磁阶段经过陷波滤波器之后电压us*的谐振幅值显著减少,电压波形得到了一定程度地改善。
同时也进行了不含陷波滤波器的电主轴弱磁调速实验进行对比。图7和图8分别为弱磁电压闭环回路中不含陷波滤波器与含陷波滤波器的dq轴电流。在图7中,由于弱磁电压闭环引入了6次谐波分量,dq轴电流产生了震荡。图8中增加了陷波滤波器后,由于对6次谐波的滤除作用,dq轴电流震荡明显减小。
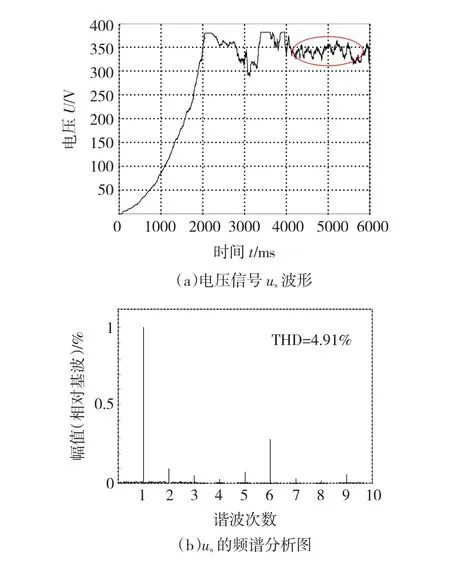
图5 弱磁阶段陷波滤波器之前电压信号us及对应的频谱分析Fig.5 The waveform and frequency analysis of voltage signal usbefore notch filter in the flux weakening region
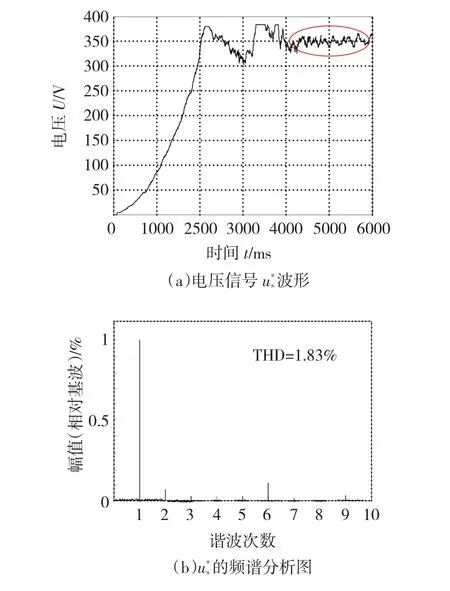
图6 弱磁阶段陷波滤波器之后电压信号us*及对应的频谱分析Fig.6 The waveform and frequency analysis of voltage signal us*after notch filter in the flux weakening region
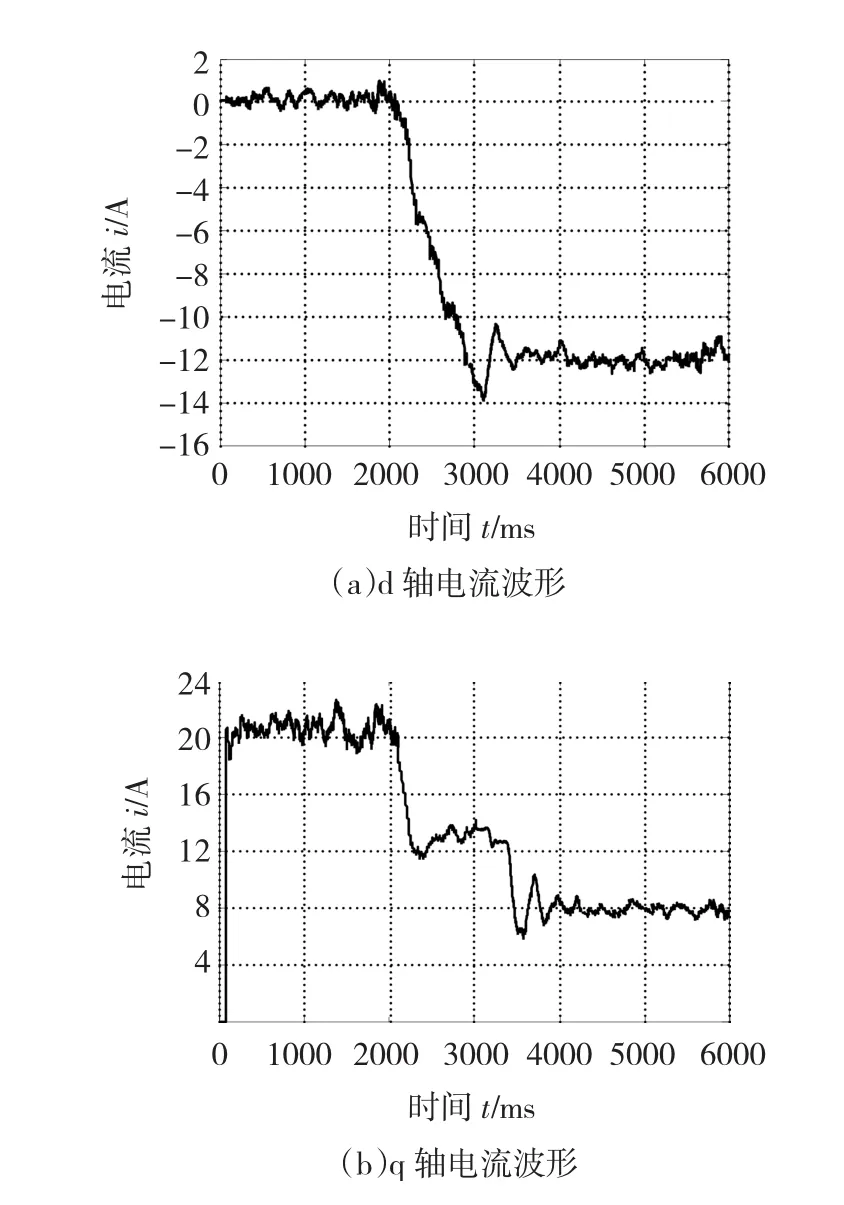
图7 未采用陷波滤波器的弱磁阶段dq轴波形Fig.7 The waveform s of dq currents w ithout notch filter in the flux weakening region
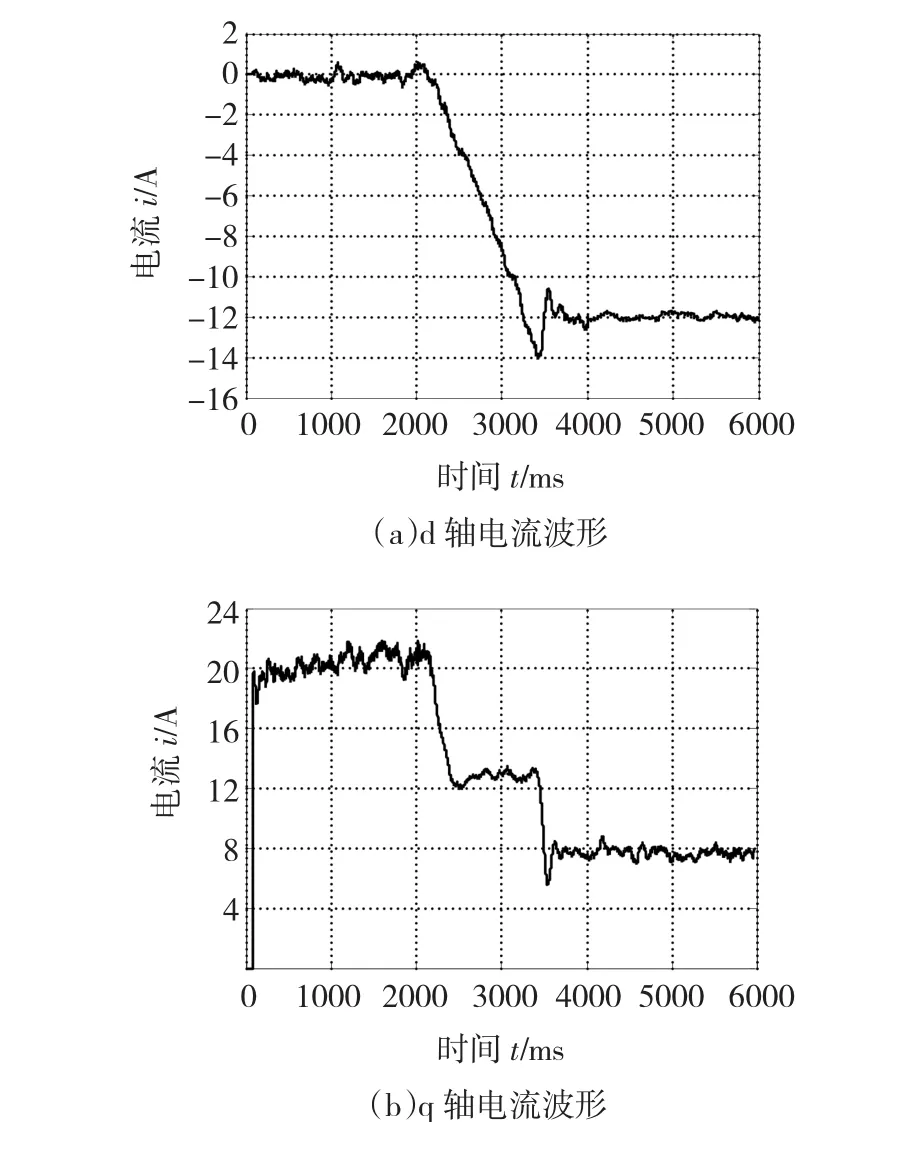
图8 采用陷波滤波器的弱磁阶段dq轴电流波形Fig.8 The waveforms of dq currentsw ith notch filter in the flux weakening region
图9和图10分别为弱磁阶段不含陷波滤波器与含陷波滤波器的A相电流波形及频谱分析图。
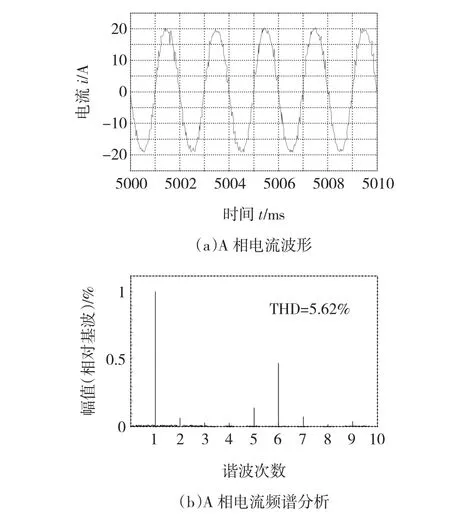
图9 未采用陷波滤波器的弱磁阶段A相电流波形及频谱分析Fig.9 The waveform and frequency analysis of A-phase current w ithout notch filter in the flux weakening region
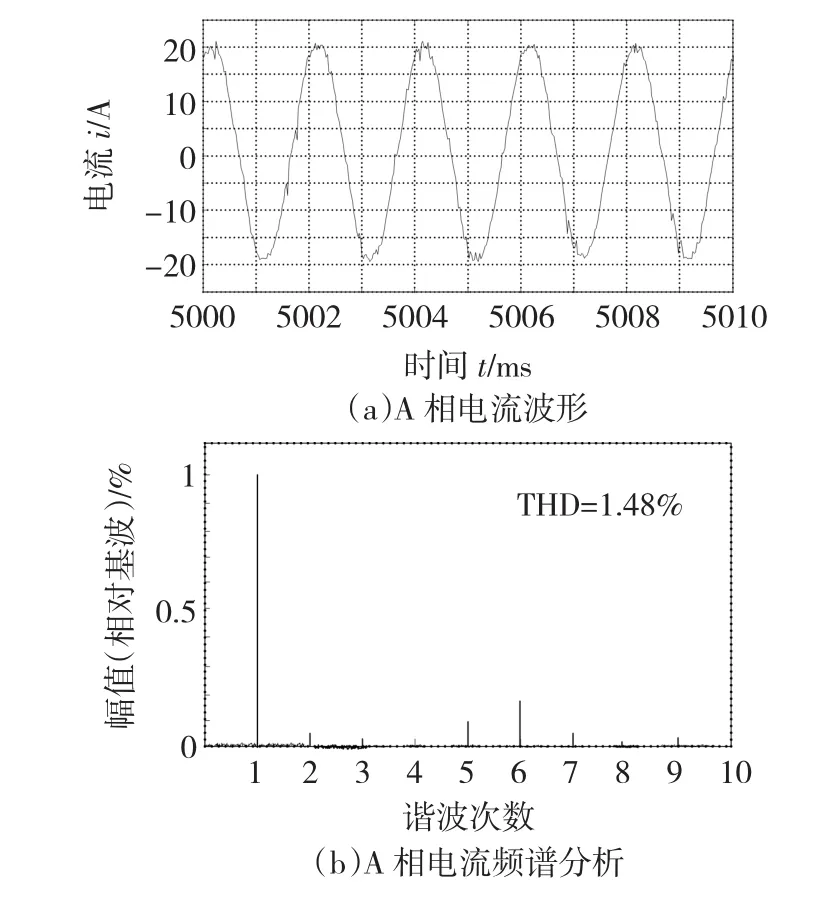
图10 采用陷波滤波器的弱磁阶段A相电流波形及频谱分析Fig.10 The waveform and frequency analysis of A-phase current w ith notch filter in the flux weakening region
通过两图的频谱分析可以看出,增加陷波滤波器之后,A相电流中的6次谐波分量明显地减少,同时滤波后A相电流中的THD分别由5.62%下降到1.48%。从两图的电流波形的对比也可以发现,滤波后A相电流的毛刺也明显减小,电流波形获得了显著改善。
图11和图12则分别为弱磁电压闭环回路中不含陷波滤波器与含陷波滤波器的弱磁阶段稳态速度波形及其频谱分析。
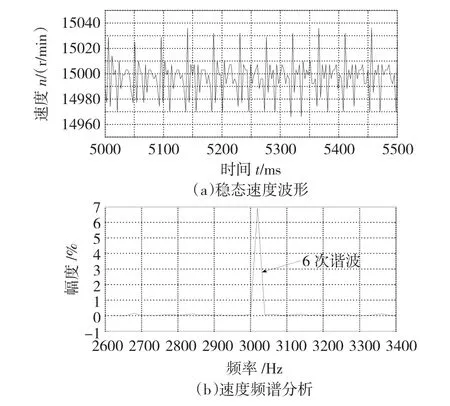
图11 未采用陷波滤波器的弱磁阶段稳态速度波形及频谱分析Fig.11 The waveform and frequency analysis of steady state speed w ithout notch filter in the flux weakening region
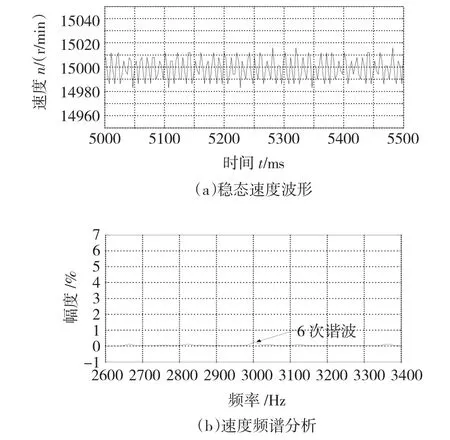
图12 采用陷波滤波器的弱磁阶段稳态速度波形及频谱分析Fig.12 The waveform and frequency analysis of steady state speed w ith notch filter in the flux weakening region
从图11可以看出,由于6次谐波分量对电流环控制性能的影响,弱磁阶段稳态速度波形有震荡毛刺,电主轴的弱磁调速性能变差。图12增加了陷波滤波器,由于滤除了电流中的6次谐波,稳态速度震荡幅值明显减小,电主轴的弱磁调速性能获得了显著提高。通过两图中速度频谱的分析对比可以发现,陷波滤波器可以有效地滤除速度频谱中的6次谐波分量,因此电机转矩的6次脉动得到了有效抑制。
5 结 论
本文以表贴式永磁同步电主轴为研究对象,在传统超前角弱磁控制算法的基础上,针对电主轴在进行弱磁调速时SVPWM过调制引起的输出电压谐波通过弱磁电压闭环使输入电流环的dq轴参考电流产生6次谐波分量,导致电流环控制性能变差进而造成稳态速度产生波动的现象,提出在弱磁电压闭环回路中加入陷波滤波器的方法,有效地滤除了输入电压信号中的6次谐波分量,弱磁阶段的相电流中的6次谐波与稳态速度的速度波动也明显地减小,提高了系统的稳态性能和弱磁控制的鲁棒性。
[1] LU Yong,GAO Shengdong,HAO Zhaopeng.Study on steadystate temperature field and thermal deformation for permanentmagnet synchronous motorized spindle[J].Advanced Materials Research,2011,305:340-343.
[2] 张兴春,张幽彤,黄文卿.车用内置式永磁同步电机过调制弱磁算法[J].北京理工大学学报,2013,33(9):925-928. ZHANGXingchun,ZHANGYoutong,HUANGWenqing.Research on over-modulation flux weakening strategy of IPMSM in HEV application[J].Transactions of Beijing Institute of Technology,2013,33(9):925-928.
[3] 李计亮,高琳,刘新正,等.过调制算法在永磁同步电机弱磁调速系统中的应用[J].微电机,2010,43(12):43-47. LI Jiliang,GAO Lin,LIU Xinzheng,et al.Application of over modulation algorithm in permanentmagnet synchronousmotorswith flux weakening control[J].Micro-motor,2010,43(12):43-47.
[4] 窦汝振,温旭辉.永磁同步电动机直接转矩控制的弱磁运行分析[J].中国电机工程学报,2005,25(12):117-121. DOU Ruzhen,WEN Xuhui.Analysis of field weakening operation for the direct torque control of PMSM[J].Proceedings of the CSEE,2005,25(12):117-121.
[5] 郑莹,邹俊忠,姚晓东,等.一种基于瞬时功率理论的弱磁控制算法[J].中小型电机,2004,31(2):14-17. ZHENG Ying,ZOU Junzhong,YAO Xiaodong,et al.Flux-weakening algorithm based on imaginary instantaneous power theory[J]. S&M Electric Machines,2004,31(2):14-17.
[6] 卞永明,蒋佳,杨礼斌.基于弱磁控制的工程机械自适应电子差速控制[J],中国机械工程,2014,25(14):1972-1977. BIAN Yongmin,JIANG Jia,Yang Libin.Construction machinery adaptive electronic differential control based on field weakening control[J].China Mechanical Engineering,2014,25(14):1972 -1977.
[7] 唐朝晖,丁强,喻寿益,等.内埋式永磁同步电机的弱磁控制策略[J].电机与控制学报,2010,14(5):68-72. TANG Zhaohui,DING Qiang,YU Shouyi,et al.Research of flux weakening strategy of interior permanentmagnet synchronousmotor[J].Electric Machines and Control,2010,14(5):68-72.
[8] 陈宁,张跃,桂卫华,等.变频空调驱动电机的弱磁控制[J].电机与控制学报,2014,18(7):65-71. CHEN Ning,ZHANG Yue,GUIWeihua,et al.Flux weakening control for drivemotor of inverter air conditioner[J].Electric Machines and Control,2014,18(7):65-71.
[9] 罗德荣,曾智波,黄守道,等.电动汽车用永磁同步电机超前角弱磁控制[J].湖南大学学报:自然科学版,2011,38(3):40 -44. LUO Derong,ZENG Zhibo,HUANG Shoudao,et al.A leading angle field weakening control method for permanent magnet synchronousmotor on electric vehicles[J].Journal of Hunan University:Natural Sciences,2011,38(3):40-44.
[10] 梁振鸿.PWM过调制技术在电动汽车用永磁同步电机控制中的应用[D].北京:中国科学院电工研究所,2002:22-38.
[11] 王榕生.优化的准正弦平顶调制波PWM过调制新技术[J].电机与控制学报,2014,18(6):9-14. WANG Rongsheng.A novel PWM overmodulation technique with the optimal flat top quasi-sinusoidalmodulating wave[J].Electric Machines and Control,2014,18(6):9-14.
[12] 孙媛媛,徐文远.整流器的谐波分析方法[J].电力自动化设备,2009,29(3):10-15. SUN Yuanyuan,XUWenyuan.Harmonic analysismethod for converter[J].Electric Power Automation Equipment,2009,29(3): 10-15.
[13] 于家斌,秦晓飞,郑军,等.一种改进型超前角弱磁控制算法[J].电机与控制学报,2012,16(3):101-106. YU Jiabin,QIN Xiaofei,ZHENG Jun,et al.An improved leading angle fluxweakening control algorithm[J].Electric Machines and Control,2012,16(3):101-106.
[14] 张世平,赵永平,刘瑞叶,等.用基于全通滤波器的IIR陷波器抑制工频通信中的谐波干扰[J].中国电机工程学报,2003,23(5):35-38. ZHANG Shiping,ZHAO Yongping,LIU Ruiye,et al.Rejecting harmonic interference in twacsusing IIR notch filter based on allpass filter[J].Proceedings of the CSEE,2003,23(5):35-38.
[15] 任旭虎,马帅,赵仁德,等.基于自适应陷波滤波器的基波与谐波有功功率分别计量[J].电力系统自动化,2011,35(16): 66-70. REN Xuhu,MA Shuai,ZHAO Rende,et al.ANF-based fundamental-frequency and harmonic active power respectivemeasurement[J].Automation of Electric Power Systems,2011,35(16): 66-70.
[16] PUNCHALARD R,LORSAWATSIRI A,KOSEEYAPORN J,et a1.Adaptive IIR notch filters based on new error criteria[J]. Signal Processing,2008,88(3):685-703.
(编辑:张诗阁)
Notch filter leading angle flux weakening control algorithm
YU Jia-bin1, WANG Xiao-yi1, XU Ji-ping1, QIN Xiao-fei2, ZHENG Jun3
(1.School of Computer and Information Engineering,Beijing Technology and Business University,Beijing 100048,China; 2.School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai200093,China;3.Institute of Automation,Chinese Academy of Sciences,Beijing 100190,China)
As permanentmagnet synchronous spindle(PMSS)runs in the flux weakening region,the SVPWM overmodulation controlwill cause the fluctuation of steady-state speed.By analyzing the principle of the leading angle flux weakening control algorithm,themain reason is that the SVPWM overmodulation causes the sixth harmonic of inverter output voltage and it transmits to the dq reference currents though the flux weakening voltage close-loop,as a result the current and speed control performance of PMSS is deteriorated.In order to solve this problem,a notch filter leading angle flux weakening control algorithm was proposed.A notch filter was designed to filter the sixth harmonic component of the input voltage signal in the voltage close-loop,and the other signal components were not affected.The experiment results show that the notch filter can significantly reduce the sixth harmonic component of the input voltage,current and speed signal in the flux weakening region,and their waveforms are remarkably improved.The flux weakening speed control performance is effectively enhanced.
permanentmagnet synchronous spindle;flux weakening control;SVPWM over modulation; sixth harmonic;notch filter
10.15938/j.emc.2015.05.015
TP 276
A
1007-449X(2015)05-0105-07
2013-05-01
北京市教委科技计划面上项目(KM201410011002);国家自然科学基金(51179002);北京市教委科技计划重点项目(KZ201510011011)
于家斌(1984—),男,博士,讲师,研究方向为电机驱动关键技术;
王小艺(1975—),男,博士,教授,研究方向为复杂电机系统建模、仿真与决策;
许继平(1979—),男,博士,副教授,研究方向为智能信号处理;
秦晓飞(1982—),男,博士,副教授,研究方向为电机驱动关键技术;
郑 军(1979—),男,博士,高级工程师,研究方向为电机控制、运动控制。
于家斌