基于四轮独立驱动电动车电机转速控制实验装置设计
2015-12-02葛厚成陈淑荣何志阳
葛厚成 ,陈淑荣,孟 飞,何志阳
GE Hou-cheng1 , CHEN Shu-rong1 , MENG Fei2, HE Zhi-yang1
(1.上海海事大学 信息工程学院,上海 201306;2.上海海事大学 商船学院,上海 201306)
0 引言
伴随着化石燃料燃烧造成的大气污染,各国越来越重视电动车辆和混合动力车的研究。其中的独立驱动电动汽车尤为热门,它的牵引力和动力学控制系统需要汽车内部ECU实时采集电机的转速、行驶状态和道路状况,然后通过中央控制器分配合理的输出转矩来满足每个电机的行驶要求,同时达到能量利用率的最大化[1]。典型的四轮独立驱动汽车由四个轮毂电机组成,去除了质量较大的传动系统,使汽车实现了轻量化,节省了能量,但是电机控制过程为分别控制,很难保证电机的运行转速达到有效组合,而转速不一致将导致汽车的侧滑移,转向失去灵敏度等不利情况,同时对车轴有一定的纵向力损伤,所以需要实时采集和控制电机转速。国内外研究车速采集与控制主要通过传感器采集到的电压、电容或者电流的变化来测量,通过脉冲或者A/D转换进入单片机显示。文中利用光电脉冲编码器输出量化的脉冲信号送到单片机,设计了可以高精度累加和计数脉冲的下位机程序,省去了模拟量输入单片机前的电路放大、削波、滤波、反相和量化等电路,节省了资源。下面重点讨论如何利用编码器,单片机和下位机程序实现四轮独立驱动电动车的实时转速测量[2,3]。
1 电机转速测量原理概述
1.1 总体框架
实验搭建是利用信号发生源产生方波脉冲,经过驱动电路使直流电机转动,通过飞思卡尔控制器对编码器送进的脉冲进行计数,得到电机转速。实验使用的器材包括示波器,信号源,无刷直流电机,飞思卡尔控制器。系统总体设计如图1所示。

图1 系统总体设计框图
1.2 测量原理
通常电机的转速测量方法有模拟式和数字式两种,模拟式采用的测试元件有测速发电机,输出的信号是电压量;数字式采用传感器,常用来输出脉冲信号的有光电编码器,霍尔元件等装置[1]。信号有正弦波(电流或者电压),方波如TTL电平,集电极开路信号(PNP,NPN),推拉等形式。通过光电编码器利用光电转换将输出轴上的机械几何位移量转换为脉冲或数字量,实验中编码器输出的是长线差分驱动的TTL电平,经过后面的电路处理后,送入单片机的接收引脚,进行脉冲的累加计数。通过下面的公式(1)[5]计算电动机的实际转速Y(t)(r/min):

式中:n是脉冲累加器计算出的1秒钟的脉冲数,N是编码器在电动机转动一圈过程中输出的脉冲个数。
1.3 测量模型
直流电机的换向刷较易产生电火花,不宜在粉尘易燃易爆的工作环境中工作,实验中采用带有H桥驱动的小型无刷直流电机,H桥有四个三极管组成两套相同的电路,同一个电路中,同时一个上拉,另一个下拉,两者保持相反的输出,可以在单电源的情况下使负载极性倒过来,导通对角线上的一对三极管,使电流流向不同从而来控制电机的转向[2]。试验用到的无刷直流电机是一种用电子换相的小功率直流电机,电机由同步电动机和驱动器组成,结构简单,运行可靠,电磁噪声低[3]。控制器是由飞思卡尔公司生产的MC9S12XET256型号的单片机,内嵌V2内核,功能强大,性能稳定,自带高容量的FLASH存储器,内部自带I/O口驱动提供电源,锁相环电源等外围电路,减少了开发者独自布线带来的麻烦。实验使用ATF20E型的信号源实时发送方波脉冲经过H桥驱动控制直流电机的转动,控制信号源发送不同频率和占空比的脉冲。首先确保上位机和下位机能够正常通信,然后在CodeWarrior开发环境下,通过上位机设计程序,编写代码下载进单片机,计算单位时间内编码器送回的脉冲,计算后通过上位机直接显示。实验测量模型如图2所示。
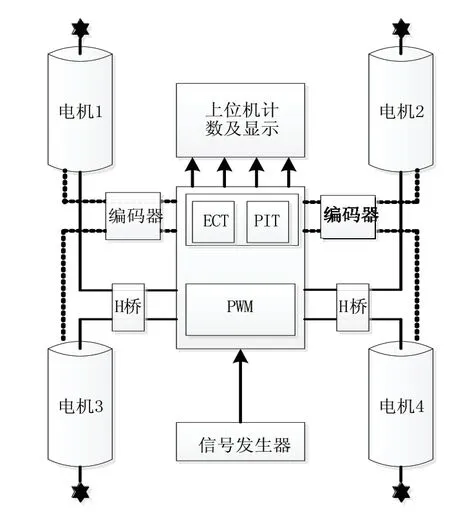
图2 测量模型图
2 系统软件设计方案
系统软件架构步骤:首先设置锁相环的频率以提高总线运行频率;定义输入输出端口的方向;初始化ECT模块、PIT模块;设置PAI函数;初始化PWM模块。然后启动电机,在主程序里每次周期中断到来时,程序转向中断函数。最后当计时结束后清除中断,显示脉冲数。具体的设计如图3所示。
在中断函数里首先将count每次加1,当count不等于20时,PIT模块通道0发生时间溢出,当count等于20时进入循环。然后当ECT模块计算3125次达到12.5ms,再循环80次,共采集1000ms来计算脉冲个数。最后把间隔1秒的前后两次数据相减即得到1秒钟的脉冲个数,经过换算便得到转速。实验采用了MC9S12XET256开发板的ECT和PIT模块,设置1秒的中断采集。通过主函数调用中断来采集脉冲通过上位机显示,也可以通过示波器显示数值[3]。
中断函数如下:
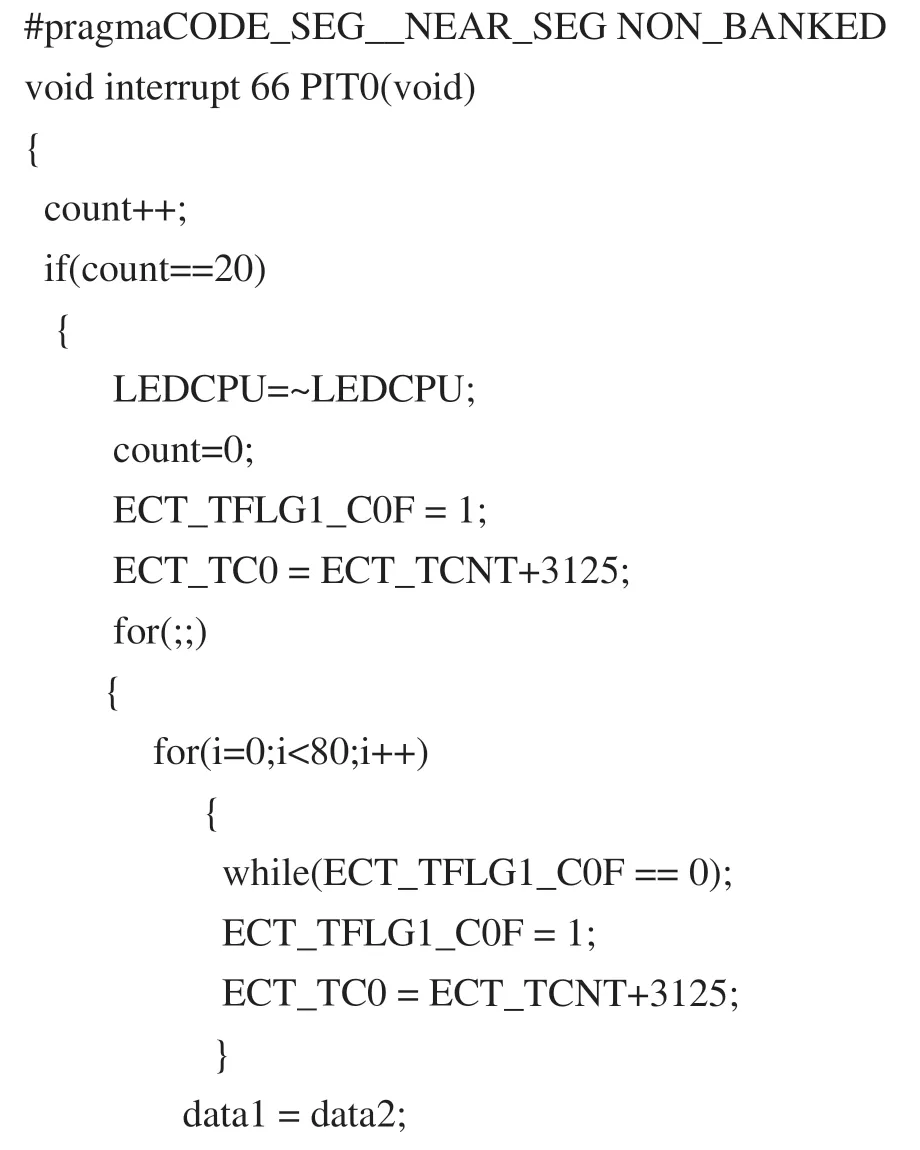

图3 程序流程框图

3 系统硬件环境设计与搭建
3.1 硬件搭建
系统硬件环境主要以单片机作为主控制器,外部设置有驱动电路,电源电路,编码器处理电路等。具体模块如图4所示。
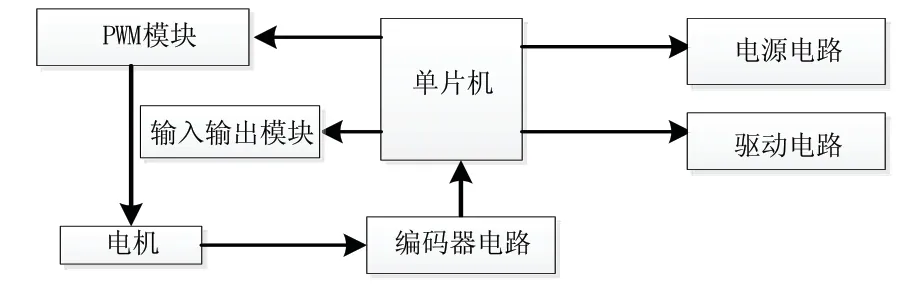
图4 硬件环境框图
3.2 电源转换电路
飞思卡尔MC9S12XET256单片机采用外部供电,可以使用5V的直流电源直接给单片机供电,但是考虑到单片机目前广泛的用在汽车电子产品中,而汽车上的主流电源是12V和24V。因此需要设计专门的电源电路对12V或者24V进行降压。如3.3V给内部的芯片使用,7.2V供给驱动桥控制电机等[9]。电路如图5所示。
3.3 驱动电路
实验利用H桥电路驱动电机,H桥使用了全桥的集成芯片MC33886来搭建,是单片机控制电机的重要电路,用来实现电机的正反转和速度大小调节。H桥由四个MOS管组成,通过不同MOS管的关断来控制电流经由VBAT流过MOTOR+和MOTOR-之间的电流方向,通过设置PWM占空比连续调节电机转速[4]。MC33886模块如图6所示。
3.4 编码器处理电路

图5 控制器电源转换原理图

图6 MC33886外部接口原理图
一般的光电编码器给出的信号幅度较小,所以首先必须进行放大整形,得到标准的方波信号,实验中设计了一种集光电隔离、鉴相、频率电压转换、电压调整输出等功能于一体的综合性电路[11]。该电路结构简单、调整方便、线性度好。可以满足不同输出信号和不同分辨率转换要求,同时,为了满足对输出电压极性的不同要求,输出电路提供了互为反相的电压信号输出。利用A,B两种信号脉冲个数计算旋转过的角度,Z相信号计算编码器轴转过的圈数[11~13]。采用TPL521-2实现对于脉冲信号的光电隔离;采用了正交解码芯片LS7084判断电机的正反转;采用稳定性比较好的电压转换芯片LM331;电压调整模块采用LM324调整,使输出的电压信号幅度值得到提高,便于识别。编码器信号的处理电路如图7所示[5]。


图7 编码器信号处理电路图
4 实验步骤及实验结果
四轮独立驱动的电动汽车一般为四个电机,由于本实验主要是验证电机通过单片机程序采集的有效性和精确性,使用了单个电机来验证。实验分为以下四步:
1)通过H桥把单片机和电机连接,按下单片机开关;
2)为了可以把不同的转速送给电机,控制信号源发送不同占空比的脉冲送给电机,实时改变电机转速(利用单片机的PWM模块发送脉冲也是切实可行的);
3)电机的转速输出通过编码器接入单片机计数引脚,通过程序进行累加脉冲,控制电机旋转的同时,计算进入单片机接收引脚的脉冲个数;
4)编码器将脉冲送到单片机中计算1秒内的输出脉冲进而换算为电机转速[16]。
分别设置信号发生器的频率为900Hz,1.45KHz,上位机显示的结果分别为900和1451,这个实验结果证明了装置的有效性。转速曲线反映了转速的不稳定性,但是基本保持在900和1450上下。结果如图8、图9所示。
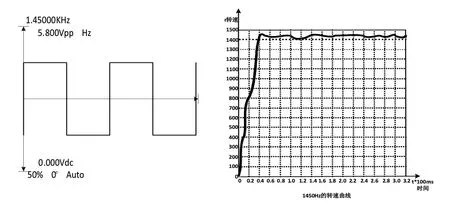
图9 实验结果二
5 结论
通过实验得知电机在不同运行环境下,电机的转速可能受到各种因素叠加而导致不稳定。本文利用搭建好的硬件环境以及编写软件代码实现了实时测量电机转速的目的。实验结果验证了本文所采用的采集脉冲的程序具有较高的采集精度和较快的响应速度。采集了电机实时速度后,可以根据电机速度,通过车内ECU控制整车的后续运行状态。下一步可以考虑在采集转速后加入控制算法来使电机进行无差的转动。
[1]冯冲,段小敏.飞思卡尔MC9S12(X)开发必修课[M].北京:北京航空航天大学出版社,2014:1-366.
[2]张杰.基于CAN总线的汽车发动机参数采集与处理系统的设计与实现[D].湖南大学,2013.
[3]吕爱红.基于CAN总线的汽车轮速采集系统设计[J].内蒙古公路与运输,2012(2):52-54.
[4]黄凯龙.基于飞思卡尔单片机的智能车及其调试系统设计[D].湖南:湖南大学,2014.
[5]毕恩兴.基于单片机控制的智能车测速算法研究[J].电子设计工程,2011,19(15):118-122.
[6]张猛.异步伺服电机的设计[D].山东:山东大学:2013.
[7]陈修波,蒋德云,张志林,朱琳,李新红.基于MC9S12XS128的无刷直流电机控制器设计[J].山东交通学院学报,2014,01:8-13.
[8]姜立标,王登峰,韩智阳.CAN总线在商用车上数据采集的实现[J].哈尔滨工业大学学报,2007,03:480-491.
[9]王经宇.基于MC689S12DG128的智能小车设计[J].工业仪表与自动化装置,2009,03:37-40.
[10]李晨,宓超.基于飞思卡尔单片机MC9S12XS128的智能车设计[J].上海海事大学学报,2012,01:82-84.
[11]孙莹,万秋华,王树洁,佘容红,卢欣然,梁立辉.航天级光电编码器的信号处理系统设计[J].光学精密工程,2010,05:1182-1188.
[12]王显军.基于SOC单片机的高集成度光电编码器电路设计[J].光学精密工程,2011,19(5):1082-1087.
[13]高伟,李玄曾.光电编码器的信号处理电路研究[J].陕西师范大学继续教育学报,2007,02:116-118.
[14]张莉,王旭,刘宗富.电流型脉宽调制在异步电动机转速控制中的应用[J].控制与决策,2005,03:349-352.
[15]王直,施晓敏,丁建军,王刘柱.增量式光电编码器信号处理电路的设计与实现[J].电子设计工程,2012,02:121-123.
[16]朱布博.基于MC9S12XS128的电动教练车智能电机控制器开发研究[D].陕西:长安大学,2014.
