TMSR核功率控制系统的PID设计与仿真
2015-12-01汪全全尹聪聪孙雪静韩利峰陈永忠李勇平
汪全全 尹聪聪 孙雪静 韩利峰 陈永忠 李勇平 刘 卫
1(中国科学院上海应用物理研究所 嘉定园区 上海 201800)
2(中国科学院大学 北京 100049)
3(中国科学院核辐射与核能技术重点实验室 上海 201800)
TMSR核功率控制系统的PID设计与仿真
汪全全1,2,3尹聪聪1,2,3孙雪静1,3韩利峰1,3陈永忠1,3李勇平1,3刘 卫1,3
1(中国科学院上海应用物理研究所 嘉定园区 上海 201800)
2(中国科学院大学 北京 100049)
3(中国科学院核辐射与核能技术重点实验室 上海 201800)
功率控制系统(Power Control System, PCS)是反应堆控制系统(Reactor Control System, RCS)的重要组成部分,它完成功率提升、功率保持与功率调节的作用。在钍基熔盐堆(Thorium Molten Salt Reactor, TMSR)核能系统固态堆设计方案中,功率控制器根据实测功率与设定功率值之间的偏差和偏差的变化趋势,按照经典的比例-积分-微分(Proportional Integral Derivative, PID)控制算法,给出调节控制棒的运动距离和运动方向等信号。PCS的PID算法设计与基于反应堆中子物理、热工及控制棒的传动性能构成的闭环控制系统的特性有关,其不同参数的确定与系统的静态和动态性能指标的要求相对应。本文从控制的角度出发,在已有的控制棒样机中设计的棒控棒位系统及相关中子物理的基础上对PCS的PID算法进行多层次仿真与参数分析,并对系统的可控性与可测性进行分析验证。分析及仿真结果表明两种控制模型下的系统均是完全可控及完全可测的,在合适的PID参数集下均能体现响应的快速性及系统的良好鲁棒性和抗干扰能力,具有实际的应用意义。
钍基熔盐堆,功率控制系统,PID,棒控棒位系统
钍基熔盐堆(Thorium Molten Salt Reactor, TMSR)核能系统项目是中国科学院先导专项之一,以研发第四代裂变反应堆核能系统为其战略目标[1]。在固态熔盐实验堆的概念设计方案中,由控制棒、控制棒驱动机构及棒控棒位控制器构成的棒控棒位系统和核功率测量装置构成的功率控制系统(Power Control System, PCS)是熔盐堆控制系统的重要组成部分。PCS包括反应堆的核功率控制系统和堆芯热功率控制系统。由于从堆芯导出的热功率变化值在特定的控制模式下与反应堆的核功率变化一致,所以核功率的控制设计对堆芯导出的热功率变化值至关重要。
反应堆的启动、停堆和功率调节主要通过一定数量的控制棒上下移动来调节反应性[2]而实现。在TMSR固态堆上,设计有16根控制棒,PCS根据堆物理对堆芯功率分布的控制要求,将16根控制棒分成若干棒束。功率控制器根据核功率测量装置的输出信号与设定功率值之间的误差及其变化趋势,根据比例-积分-微分(Proportional Integral Derivative, PID)控制算法,从而给出调节控制棒的运动距离和运动方向等信号,相应的控制棒束在该信号的驱动下以指定的速度运行到指定位置[3],从而达到调节核功率的目的。
由于反应堆在运行过程中受到的不确定性因素的影响(如在不同运行功率下导致的模型参数的变化等),使得PCS的控制特性会变差,使用近似线性化得到的系统模型的传统PID设计的效果在控制精度与鲁棒性方面不太理想。故在传统PID设计的基础上,提出改进型PID多环路设计,用于改善PCS的动态特性和鲁棒性。
本文在已设计完成的控制棒样机的基础上,从控制的角度出发,首先提取控制棒驱动机构(Control Rod Drive Mechanism, CRDM)各单元的数学模型,并对其系统模型进行可控性与可测性分析,然后在MATLAB环境下进行两种PID设计仿真并对不同方式PID参数下的系统静态性能和动态性能进行分析比较,为PCS控制器提供PID参数集。
1 核功率控制系统的数学模型及分析
核功率控制系统在当前棒控棒位系统的设计基础上实现,棒控棒位系统的机械与电气设计如图1所示。步进电机通过离合器实现与CRDM的挂接,离合器在断电落棒操作中处于分离状态,在正常棒运行的过程中,离合器处于吸合状态。减速器采用三级齿轮减速,可获得435的减速比,从而将步进电机的负载能力提高近450倍。CRDM采用链轮链条型设计,在链条的传动下控制棒体能够在引棒的带动下完成预定的精确到毫米级的上下直线运动。
核功率控制系统的最终输出信号传递给棒控棒位系统,进而完成指定的控制棒或棒束的运动。核功率控制系统的系统框图如图2所示。在棒控棒位系统的设计基础上,核功率控制系统可分为功率执行机构和系统测量装置。功率执行机构由棒控系统控制实现对控制棒的调节,从而起到直接控制反应堆功率的作用。系统测量装置包括反应堆输出功率测量装置、步进电机转速测量装置及控制棒位置测量系统,可以实时地检测反应堆的工作状态。
从控制的角度出发,需提取各个单元的数学模型,最后得出整个控制对象的数学模型。控制对象即为控制器控制的一系列元器件所构成的复合系统,系统的传递函数即为各个单元串联后的电气传递函数之积。
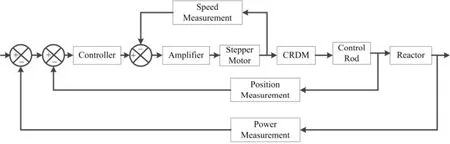
图2 核功率控制系统框图Fig.2 Block diagram of nuclear power control system.
1.1 各单元的数学模型
1.1.1 堆芯数学模型
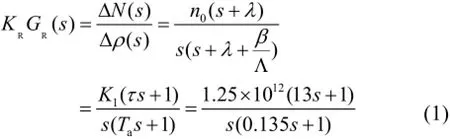
反应堆在运行过程中,堆芯物理过程的复杂使得堆芯中子动力学性能多变,从而无法简单地确定堆芯的具体线性数学模型。从控制设计角度出发,诸多文献[4−5]中普遍采用单组点堆中子动力学模型来替代实际的复杂多变的运行时堆芯中子动力学模型。因此,TMSR核功率控制系统在设计阶段拟采用等效单组缓发中子点堆模型,其传递函数[6−7]为:式中,ΔN(s)表示堆芯中子密度的变化量;Δρ(s)表示控制棒引入的反应性变化量;K1表示反应堆的传递系数;Ta及τ表示反应堆的时间常数。
1.1.2 测量装置数学模型
功率测量装置是采用裂变电离室来测量中子密度,根据额定功率对电离室的要求及电离室的灵敏度与定值器设定值,可得电离室的传递函数[7]为:

式中,R为定值器参考电阻;ΔIk为电离室的灵敏度;Δn为额定功率时的中子密度。
控制棒位置测量装置可等效为时间常数100 ms的一阶惯性模型环节,即其传递函数为:

1.1.3 CRDM数学模型
CRDM由链轮链条、减速器、离合器、步进电机及其驱动器等组成,其传递函数为:
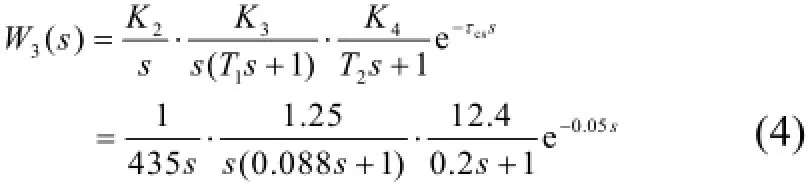
式中,K2为减速装置的减速比,减速装置等效为比例环节;K3为步进电机的传递系数;T1为步进电机的时间常数;K4为电机驱动器的放大系数;T2为驱动器的时间常数;τcs为链轮链条等的延时常数,在后续的公式推导中该项可忽略不计。
控制棒的微分当量ΔKcr=1.28×10−5[7−8]。
1.2 系统数学模型及分析
根据系统的设计方案提取出不同的系统数学模型,可分为仅考虑功率测量装置的传统型控制对象模型及同时考虑电机速度、控制棒位置及功率测量的改进型多环路控制对象模型,然后再针对不同的系统模型进行可控性与可测性的控制型分析。
1.2.1 传统型控制系统对象及分析
传统型核功率控制系统由PLC控制器、CRDM、控制棒及功率测量装置来实现,其系统框图如图3所示。
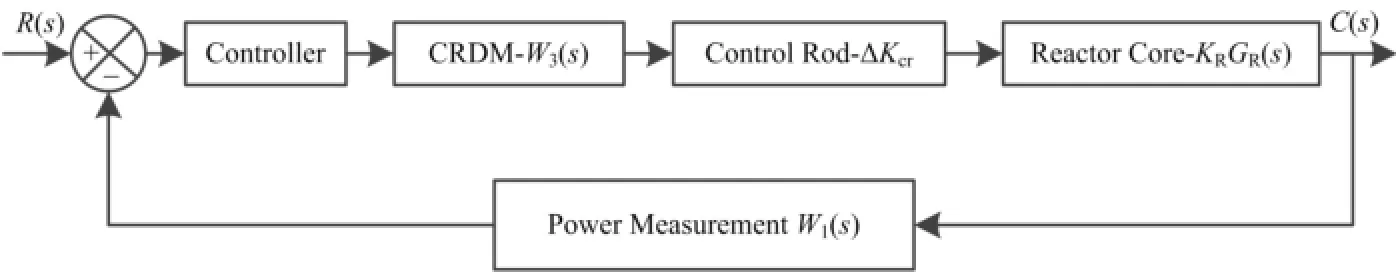
图3 传统型控制对象模型Fig.1 Traditional control object model.
根据图3及各单元的传递函数及基础开闭环理论,传统型核功率控制系统对象的闭环数学模型为:
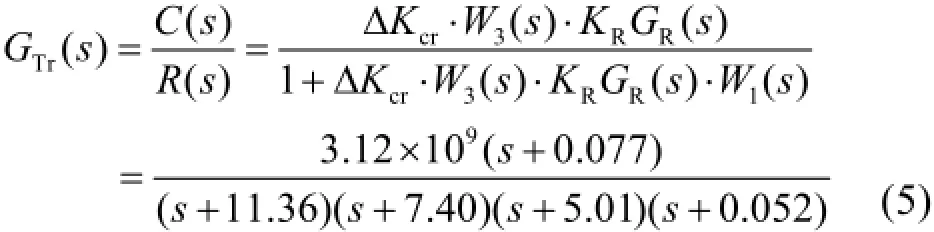
式(5)的零极点模型是通过MATLAB计算得出。由该式可知,GTr(s)的极点均在复平面的左半平面,即该系统是稳定的,且可知系统阶数为4。
由卡尔曼提出的可控性与可测性的概念在现代控制系统设计中起着重要的作用。如果在一个有限的时间间隔内施加一个无约束的控制向量,使得系统由任意初始状态x(t0)转移到任意其他状态,则称系统在时刻t0是状态可控的[9]。将式(5)的传递函数型系统模型转换成状态空间描述模型[A,B,C,D],进而得到系统的可控性变换矩阵:
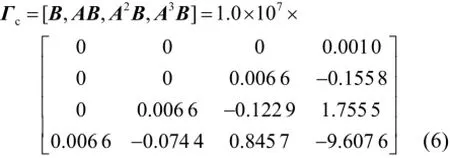
由式(6)可得Γc的秩为rank(Γc)=4,等于该系统模型的阶数,即该系统在任何时刻是状态完全可控的,此外,也可证明该系统是输出完全可控的。
若系统的状态x(t0)在有限的时间间隔内可由输出的观测值确定,那么称系统在时刻t0是可测的[9]。同可控性分析方式,得其可测性变换矩阵:
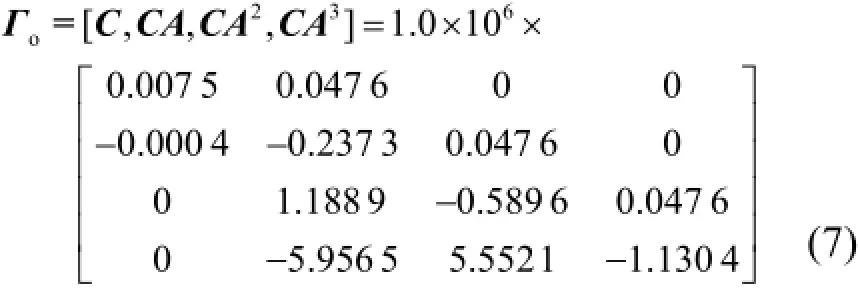
由式(7)可得Γo的秩为rank(Γo)=4,等于该系统模型的阶数,即该系统在任何时刻是完全可测的。
该模型下系统的状态完全可控性、输出完全可控性与完全可测性使得设计的系统在任意时刻可对其诸多物理过程的动态行为进行分析,从而积累可靠实验过程数据进行参数更新。
1.2.2 改进型多环路控制系统对象及分析
当考虑到电机速度反馈及棒位反馈时,可基于图2得到多环路的控制系统模型如图4所示。
由图4可得控制系统对象模型的传递函数为式(8)−(10):
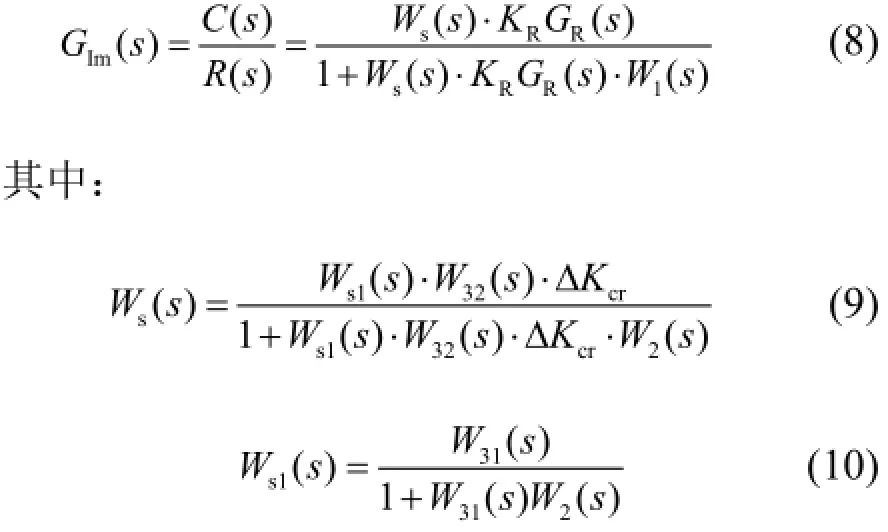
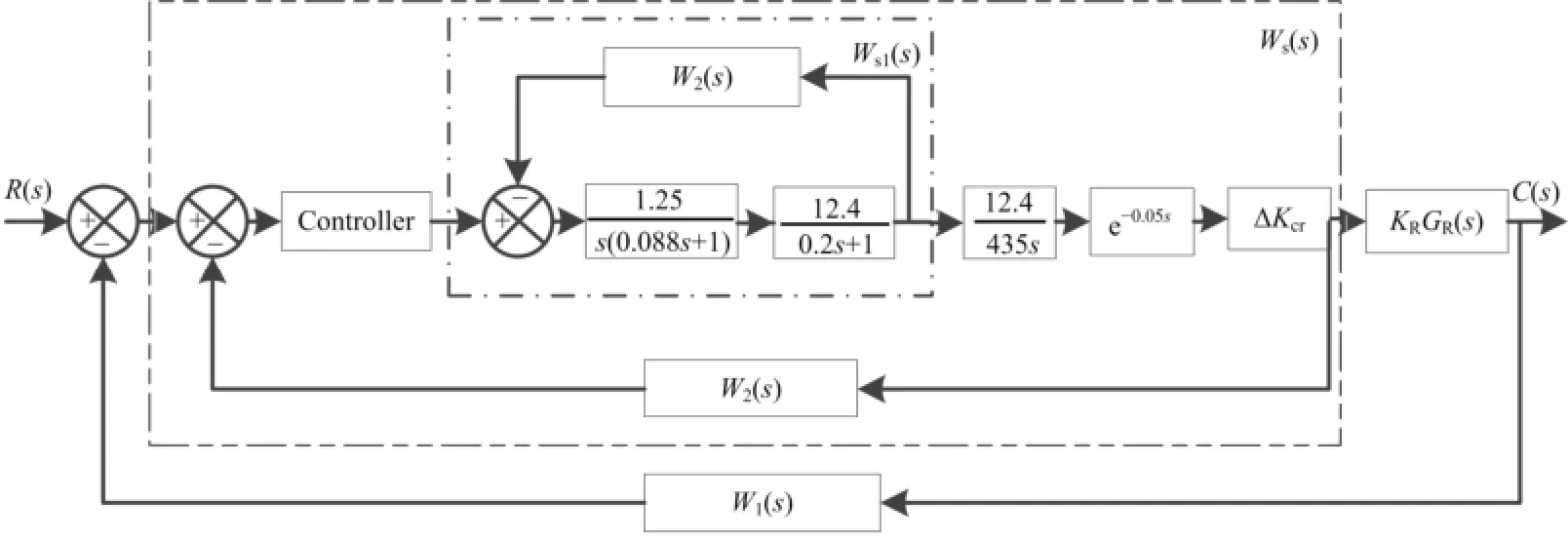
图4 改进型多环路控制系统对象模型Fig.4 Improved multiple circle control system object model.
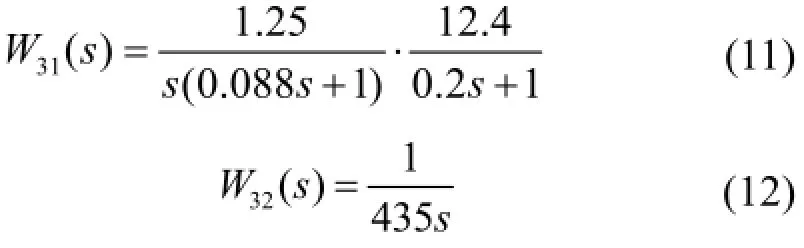
式(11)为驱动器和步进电机的传递函数,式(12)为减速装置的传递函数:
将式(9)、(10)代入式(8)及各原始单元的传递函数可得GIm(s)的零极点模型:
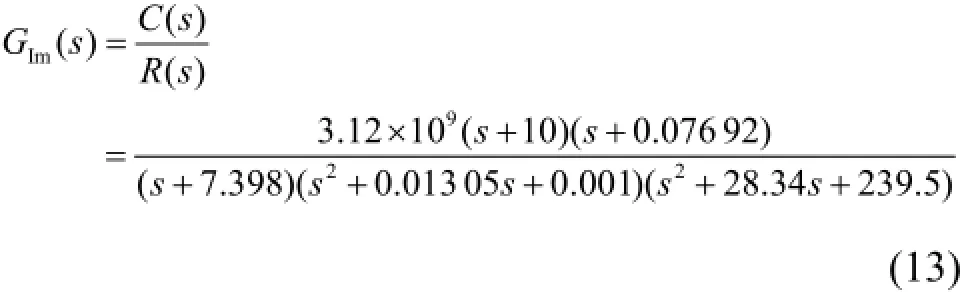
由式(13)可知,该系统模型下的传递函数的极点均在复平面的左半平面并存在一对主导共轭复数极点,得该系统也是稳定的,其阶数为5。同上所述,可得该系统的可控性变换矩阵及可测性变换矩阵的秩均为5,即知该系统同样是状态完全可控与完全可测的。
2 PID控制器设计与分析
PID控制器在试验之前应具备满足条件的参数范围,而非仅仅一组理论上的最优化参数。两种控制模型传递函数的较高阶次,使得各种参数整定法中对初始参数基准难以获得,故本文中拟采用计算最佳化参数方法结合@MATLAB/Simulink模型基于系统传递函数在控制系统对动态性能的具体要求下进行设计。
计算最佳化参数算法是利用MATLAB脚本文件来实现的试凑响应法,根据图5所示的系统以及给定的最大超调量或上升时间等参数进行比例系数Kp和整定参数a的初步调试。

图5 PID控制系统Fig.5 PID control system.
图5 中传递函数如式(14)所示。可降低参数的计算复杂度,并将整定参数a设定范围于(0,10),且步长设定为0.1。

在不考虑使用PID控制器的情况下,由CRDM及相关测量方案构成的传统型及改进型控制对象的阶跃响应如图6所示。图6(a)是传统型控制对象模型对应的阶跃响应,易知其稳态中子通量密度幅值过于偏小(仅是初始中子通量密度的0.38%)。改进型控制对象模型的阶跃响应(图6(b))有55%的超调量,且其调整时间超过14 min。故在原控制对象阶跃响应的基础上进行如图5的PID控制器初步设计,以达到控制工程中快速、稳定、超调量小的特点。
根据图5的计算最佳化参数算法,可得到满足条件的初始参数化值[K, a]=[1.2×106, 4.7]。因此,可在此基础上,构建 MATLAB/Simulink模型进行进一步的PID参数设计。
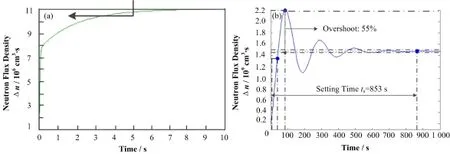
图6 控制对象 (a) 传统型,(b) 改进型的阶跃响应(没有PID控制器时)Fig.6 Step responses of the control object of traditional (a) and improved (b) without PID controller.
在图3、图4的基础上建立Simulink仿真控制模型,如图7所示。因为涉及到两种控制对象模型,所以采用Manual Switch来控制仿真通道。其中,PID-subsystem采用如图8所示的模型,微分部分加入了实际PID控制器中的惯性环节单元,所采用的满足条件的PID参数集建立于初始化参数值[K, a]上,具体满足条件的参数集见图9及图10。
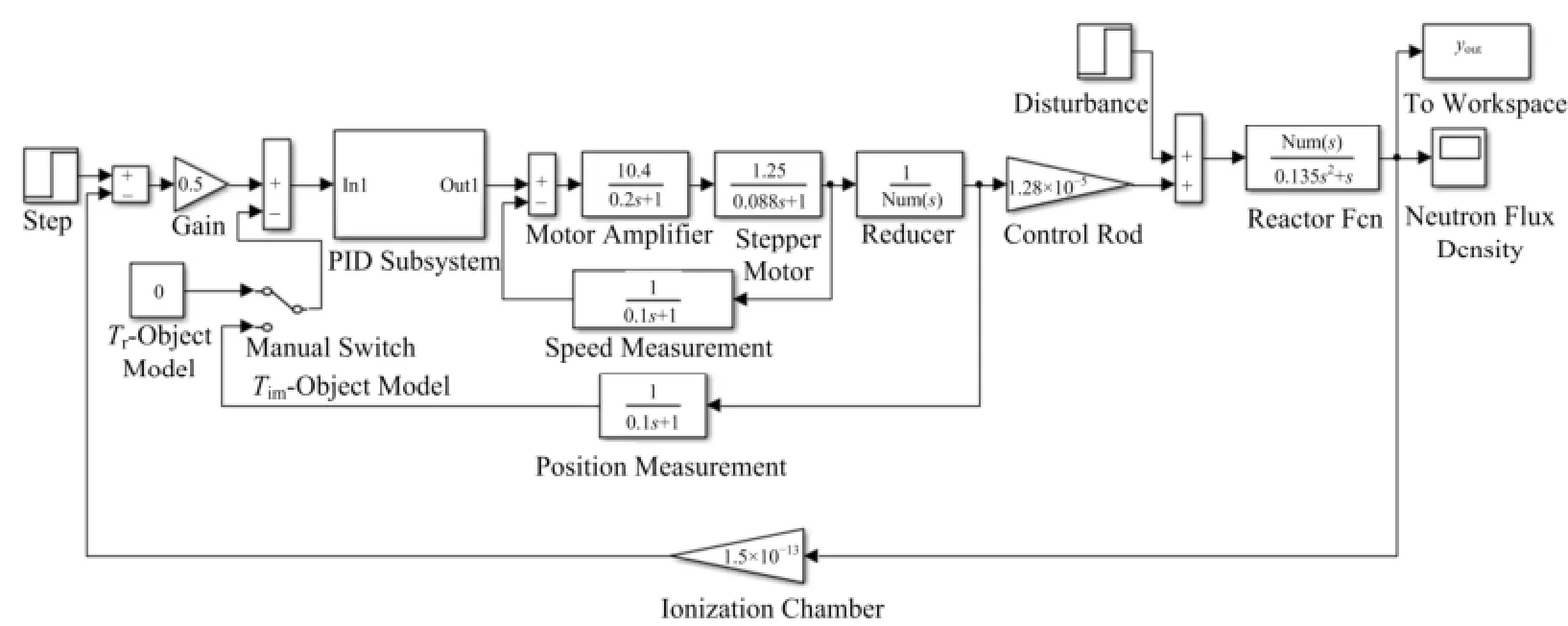
图7 MATLAB/Simulink控制对象PID仿真模型Fig.7 PID simulink model of control objects in @MATLAB/Simulink.
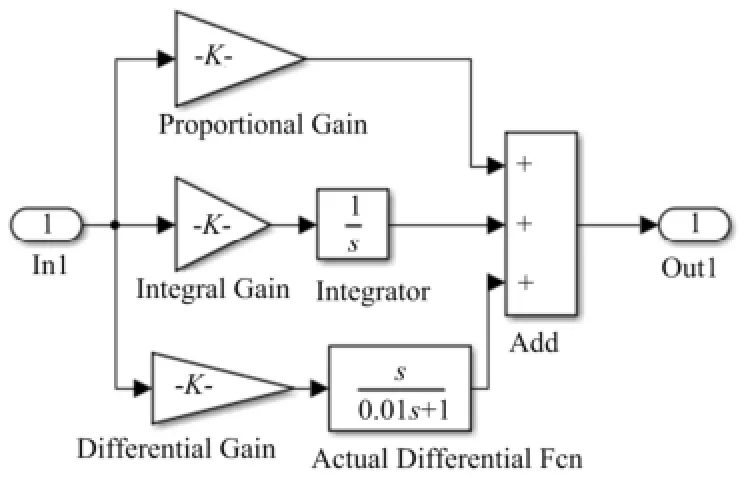
图8 PID子系统的实际模型及最优参数集Fig.8 PID-subsystem actual model and optimal parameter set.
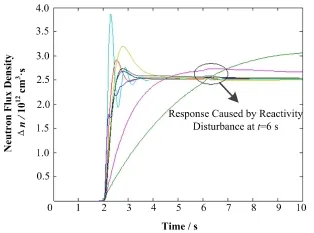
图9 功率控制系统传统型控制模型在不同PID参数下的阶跃响应Fig.9 Step responses with different PID parameters in traditional control models in PCS.
图9是功率控制系统传统型控制模型(对应图3)在初始化PID参数集上进一步优化的仿真结果。图9中满足条件的仿真曲线集中最大超调量在2.34%−15.79%,上升时间均小于0.5 s。参数集范围为:[Kp, Ki, Kd]=[(1.4×107−20.4×107), (1.3×106−18.7×106), (1.2×106−20.2×106)],图9仿真曲线中的最优结果选取的参数是[Kp, Ki, Kd]=[5.4×107, 4.6×106, 1.0×106]。在选取合适的参数下,该控制模型针对测量值的阶跃响应可以有很快速的响应和较小的超调量,满足条件的PID参数范围广,在控制端体现出较强的鲁棒性。图9中椭圆的部分是在堆芯前引入的反应性扰动带来的响应,由图9可知,该扰动在第6 s处引入,在不到0.5 s的时间内扰动引入的响应即消失,故在合适的PID参数集下,该控制模型的抗干扰能力较好。
图10是改进型功率控制系统控制模型(对应于图4)的阶跃响应,所采用的PID参数集和Tr模型中的一样,图10中仅显示了一组参数下的仿真结果。由图10可知,在采用相同PID参数的情况下,Im多环路控制模型的阶跃响应的超调量有所改善,中子通量密度的响应时间也有所缩短,有利于对堆芯中子通量密度的控制。
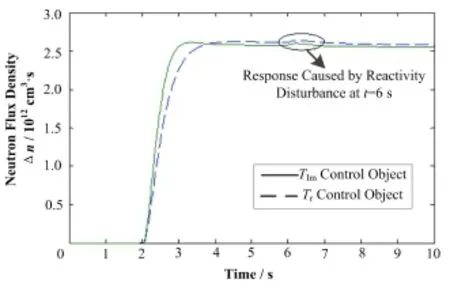
图10 改进型功率控制系统的控制模型在相同PID参数下的阶跃响应Fig.10 Step response in improved PCS control model with same parameters above-mentioned.
加入棒位的及时反馈控制可以提高棒位的精确性,提高反应堆控制的安全性,可防止反应堆因超负荷运行停堆等安全事故。棒位反馈回路的存在增强了系统的抗干扰能力,使得回路内的扰动迅速被吸收处理。
3 结语
在TMSR的控制棒样机基础上进行关于功率控制样机的研究,对控制模型及控制参数进行了前期的理论探索。控制模型提取于控制棒样机中的CDRM及堆芯的模拟传递函数。据CRDM的机械设计及测量方案,提出两种控制模型:仅包含功率测量和内部转速测量的传统型堆芯对象模;包含功率、棒位和转速测量的改进型多环路堆芯对象模型。针对两种控制模型均提出了详细的单元传递函数及系统级传递函数,并进行了可控性和可测性分析,得出了两种对象模型均是完全可控与完全可测的结论。在控制模型的基础上应用的是成熟的PID控制算法,通过@MATLAB/Simulink及最优化参数方法可获得满足条件的初始化参数集,并在此基础上进行进一步的仿真探究,表明在合适的控制参数集下,两种控制模型代表的PCS对象均具有跟踪性能好、鲁棒性强、抗干扰能力较强等特点。此外,具有棒位精确反馈的改进型模型有着比传统型模型更好的跟踪性能及快速响应性,使得这种改进型模型有着更突出的应用意义。
1 江绵恒, 徐洪杰, 戴志敏. 未来先进核裂变能—TMSR核能系统[J]. 中国科学院院刊, 2012, 27(3): 366−374 JIANG Mianheng, XU Hongjie, DAI Zhimin. Advanced fission energy program-TMSR nuclear energy system[J]. Bulletin of Chinese Academy of Sciences, 2012, 27(3): 366−374
2 Wang Q Q, Li Y P, Wei Y B, et al. TMSR single control rod drive mechanism control system and its reliability analysis[C]. Proceedings of 2013 2ndInternational Conference on Measurement, Information and Control, ICMIC, IEEE, Harbin, China, 2013: 737−741
3 陈永忠. TMSR概念设计报告-功率控制系统[R]. 上海:中国科学院上海应用物理研究所, 2013: 776−778
CHEN Yongzhong. TMSR concept design reports-power control system[R]. Shanghai: Shanghai Institute of Applied Physics, Chinese Academy of Sciences, 2013: 776−778
4 朱昊, 韦钢, 翟春荣. 核电站堆功率调节器的设计与改进[J]. 核技术, 2013, 36(12): 120605
ZHU Hao, WEI Gang, ZHAI Chunrong. Design and improvement of nuclear reactor power controller[J]. Nuclear Techniques, 2013, 36(12): 120605
5 李彬, 何小旭. 核反应堆功率控制系统设计与仿真[J].工业控制与应用, 2008, 27(10): 15−18
LI Bin, HE Xiaoxu. A reactor power control system[J]. Industry Control and Applications, 2008, 27(10): 15−18
6 程懋松, 戴志敏. 熔盐增殖堆初步安全分析[J]. 核技术, 2013, 36(6): 060601
CHENG Maosong, DAI Zhimin. Preliminary safety analysis of molten salt breeder reactor[J]. Nuclear Techniques, 2013, 36(6): 060601
7 石海松, 张建民. 核动力控制系统连续仿真和离散仿真的研究[J]. 核科学与工程, 2003, 23(4): 318−324
SHI Haisong, ZHANG Jianmin. Simulations research of the continuous system and the discrete system in a nuclear power control system[J]. Chinese Journal of Nuclear Science and Engineering, 2003, 23(4): 318−324
8 Zhou X M, Liu G M. Study of control rod worth in the TMSR[J]. Nuclear Science and Techniques, 2013, 24(1): 010601
9 Ogata K. Modern control engineering[M]. 5thEd. Beijing: Publishing House of Electronics Industry, 2013: 512−522
CLC TL362+.5
PID design and simulation of TMSR nuclear power control system
WANG Quanquan1,2,3YIN Congcong1,2,3SUN Xuejing1,3HAN Lifeng1,3CHEN Yongzhong1,3LI Yongping1,3LIU Wei1,3
1(Shanghai Institute of Applied Physics, Chinese Academy of Sciences, Jiading Campus, Shanghai 201800, China)
2(University of Chinese Academy of Sciences, Beijing 100049, China)
3(Key Laboratory of Nuclear Radiation and Nuclear Energy Technology, Chinese Academy of Sciences, Shanghai 201800, China)
Background: Power Control System (PCS) is one of the most significant systems in Reactor Control System (RCS). PCS accomplishes functions such as power lifting, power maintain and power regulation. Purpose: In the solid reactor design scheme in Thorium-based Molten-Salt Reactor (TMSR) nuclear energy system, power controller is designed to generate signals for control rod moving direction and distance according to the deviation and deviation change trend between the measurement power value and preset value with classical Proportional Integral Derivative (PID) control algorithm. Methods: The PID design of PCS has a relationship with the characteristics of closed control loop which is constructed by reactor neutron physics, thermodynamics and transmission performance of control rods. Different design parameters determine various control system steady and dynamic performance. It is important and necessary to give a parameter set that can provide required characteristics for the control models. With the perspective of control engineering, this paper gives simulation and parameter analysis of PID algorithm of PCS on the basis of control rod control system and positioning system that has already been constructed and fundamentals of neutron physics. Apart from this, the controllable and measurable characteristics of two control models (a traditional control model and an improved multiple-loop control model) are investigated. Results: The system controllable and measurable characteristics analysis from transfer function of two control model showed that our control objects were completely controlled and completely measured in any state. The PID design and the simulation results demonstrated that the two control model both achieved satisfactory tracking performance and robustness with appropriate control parameters. Conclusion: In fact, compared with the traditional model, the improved control model which is of practical significance has better dynamic characteristics, especially in working against unmeasurable disturbances.
Thorium-based Molten-Salt Reactor (TMSR), Power Control System (PCS), Proportional Integral Derivative (PID), Rod control and rod positioning system
TL362+.5
10.11889/j.0253-3219.2015.hjs.38.020601
中国科学院战略先导科技专项(No.XDA02010300)资助
汪全全,男,1987年出生,2010年毕业于中国科学技术大学电子科学与技术系,现为博士研究生,研究领域为熔盐堆功率控制系统设计与棒控棒位系统设计
李勇平,E-mail: liyongping@sinap.ac.cn
2014-08-25,
2014-11-11