陀螺和加速度计微惯性测量系统设计
2015-11-28范锦彪
李 慧,范锦彪
(中北大学电子测试技术国家重点实验室,山西 太原 030051)
微惯性测量系统的设计对于现代武器系统的机动能力、可靠性、环境适应性等的技术性指标具有决定性影响。它的精度在很大程度上决定了卫星、导弹、航天器的姿态精度,对各类飞行器的定位、定向及姿态的确定具有重大作用。为此,设计了陀螺和加速度计微惯性测量系统,以实现对飞行体姿态的高速度、高精度采样存储。
1 微惯性测量系统的硬件设计
1.1 硬件系统总体设计
实时记录弹体内通过测量的加速度和角速度是惯性测量系统硬件部分的主要任务,微惯性测量单元的硬件部分主要由电源控制器、中心控制器、Flash 存储器、三轴陀螺、三轴加速度计、适配放大滤波电路和接口电路组成,如图1 所示。

图1 微惯性测量单元硬件框图
由于A/D 转换器的输入范围为0 V~2.5 V,但是传感器的输出范围在0 V~5 V,所以在信号从传感器输出以后,需要将信号缩小到A/D 转换器可接受的范围。本文采取了电阻分压的方式进行信号缩小,缩小到0 V~2.5 V 的信号被输入A/D 转换器,信号转换为数字信号,并存入Flash 存储器。实验完成后装置从弹体中取出,并经过上位机读取数据后进行信号处理、解算和输出[1-3]。
本文中微惯性测量单元的性能指标要求工作温度在-40 ℃~60 ℃,角速度测量范围:X,Y,Z:±2 000 °/s,加速度测量范围:±50 g,分辨率为12 bit,采样频率50 kSa/s,技术实践60 s 记录通道为8 通道,存储容量48Mbyte,陀螺传感器精度≤0.5%FR;加速度传感器精度≤0.5FR,USB 接口为上位机接口方式,数据保持时间≥72 h。
1.2 微惯性测量系统的状态设计
介于设备使用的要求和条件,以及电路设计的原理,通常在进行设计测试系统时要先完成功能设计,而后进行状态设计,最后进行整体电路设计[4,5]。图2 为微惯性测量单元状态设计图,状态设计分为待上电、初始化、顺序记录、等待读数、读数、擦除六种状态。

图2 微惯性测量单元状态设计图
1)待上电:电池开始为电源控制芯片供电,等待上电信号。此状态下,电流标准设置为20 μA 左右,为达到低功耗要求,只有MAX894L 和CPLD 电源管理芯片接通电源,装置的上电方式为断线上电。
2)初始化:复位信号会在断线上电后在电路中产生,对CPLD 进行复位操作。系统设定为保持上电信号1 s 以上电路才进行上电,主要原因是为了避免电路中产生的毛刺使电路误上电。
3)顺序记录:时间60 s,长度48Mbyte,此状态需保证Flash 存储器中的数据已被擦除过,且电路进行断电上电,数据记录成功后,进入低功耗状态,自动关闭传感器电源,等待读数。
4)等待读数:等待与上位机相连,此时系统不再进行任何数据的记录和存储。
5)读数:装置在与上位机连接后,发出读数指令,唤醒单片机,设备接收指令后,AD 总线进入高阻态,CPLD 总线同步进入到输出状态,读出存储设备中数据。读数完成后,既可以进入擦除状态,也可以直接下电。
6)擦除:上位机对Flash 存储器发擦除命令,进行按块擦除。此状态需要在数据读出后进行。
2 传感器的选择
2.1 陀螺传感器的选择
由于相比于传统陀螺仪,MEMS 陀螺具有重量轻、体积小、结构坚固、抗冲击强等特点,故本文选择MEMS 陀螺作为微惯性测量单元的传感器。
MEMS 陀螺的工作原理是随着三个轴角速度的变化而输出不同的电压信号,此信号在经过A/D 转换器后以数字信号存储在Flash 存储器中,之后通过上位机软件将信号读取到计算机并解算成需要的参数值。
由于成本、体积、速度等方面的考虑,且要求设备在随着时间和温度变化的条件下依然能够保持较好的稳定性和可靠性,本文选择采用MEMS 技术芯片的西安精准测控公司生产的PA-3ARG 系列固态角速率陀螺,其是一种具有高可靠性和高封装坚固性的三轴角速度传感器。
2.2 加速度传感器的选择
由于:a=f/m,即:加速度=惯性力/质量,可知加速度可以通过测量惯性力的方式被计算出来。而惯性力可以通过电磁力来平衡,电磁力和电流又存在着比例关系,可以通过实验得出惯性力和电流的关系,信号处理电路记录电流便可通过惯性力得出加速度[6]。
由于功耗、体积、稳定性和精度方面的考虑,本文选用Analog Device 公司的ADXL 系列的加速度传感器[7]。
3 微惯性测量系统的上位机软件设计
LabVIEW 软件是一款提供直觉式开发环境的软件,且其拥有丰富的数据采集、分析和存储等相关函数。本文选用LabVIEW 软件作为数据采集系统的设计开发软件。
3.1 软件主界面
在充分考虑人机界面要与以往软件风格的衔接及人们实际操作习惯等因素的条件下,本系统软件界面如图3。

图3 软件主界面
软件图形界面的左边是波形图空间,用来显示数据得出的波形,可以通过LabVIEW 软件的波形显示控件直接显示多种波形,“采样长度”控件记录采集的数据量,以MB 为单位,“采样读数”控件对设备内的数据进行读取,“打开文件”控件用于打开以前的数据,“通道选择”控件查看不同通道中的数据波形。
3.2 程序各部分功能
主程序主要由程序初始化部分,主体部分和程序退出部分三部分组成。主体部分是用来响应用户各种操作的一个带While 循环的事件结构。
根据系统要求设计了数据采集子程序、读取二进制文件子程序、数据转换子程序和通道选择子程序。
通过数据采集子程序及读取二进制文件子程序发送读数指令和读取二进制文件(.dat 文件),并输出成为一维数据。再用数据转换子程序将.dat 文件从8 位转换为16 位,并处理得到12 位A/D 转换的结果。
通道选择子程序能够将得到数据的一维数组,按照8 个通道分成8 个数组,并且按照用户选择的通道进行输出。
3.3 模块化程序设计
为了使主程序能够简单易读的同时又方便分开调试,且不容易出错,采用了子VI 的方法。采样读数、读取文件、数据转换、通道选择的程序分别封装成子VI,分别调用不同的子VI,就能分别实现其对应功能。节省了工作路径的同时,也提高了运行速度和稳定性。
3.4 事件结构
事件结构能够根据用户的不同动作去执行不同的程序,是当今主要的人机界面设计方法之一。由于事件通常需要多次执行,而不是只执行一次,所以通常情况下事件结构需要配合While 循环一同使用。相比于不断循环判断触发条件的轮询结构,事件结构等待触发的特点能够节省大量的系统资源。
3.5 错误处理
软件设计人员需要对软件有全面的了解,在软件发生问题的时候,能够迅速找到问题发生的地方,作为LabVIEW 编程中重要的一环,软件本身提供了错误输入和错误输出控件,通过这两个控件,可以方便地进行错误处理。
如图4 所示,本次软件设计中,使用了错误输入簇和错误输出簇,程序框图最左边是错误输入簇,之后数据流经过程序初始化部分、主循环事件结构部分、程序结束部分,最后在错误输出簇部分结束。这样设计出来的程序,体现了数据流编程的思想,不但能够使程序按照数据流的方向执行,而且能够很好地处理程序各个部分产生的错误。
4 实验结果
为了验证微惯性测量系统的性能,利用三轴无磁性转台模拟弹体的飞行姿态。以X 轴为例:如图4 为两个传感器采集到的X 轴信号。将采集到的三轴信号进行后续的解算即可得到需要的飞行参数。
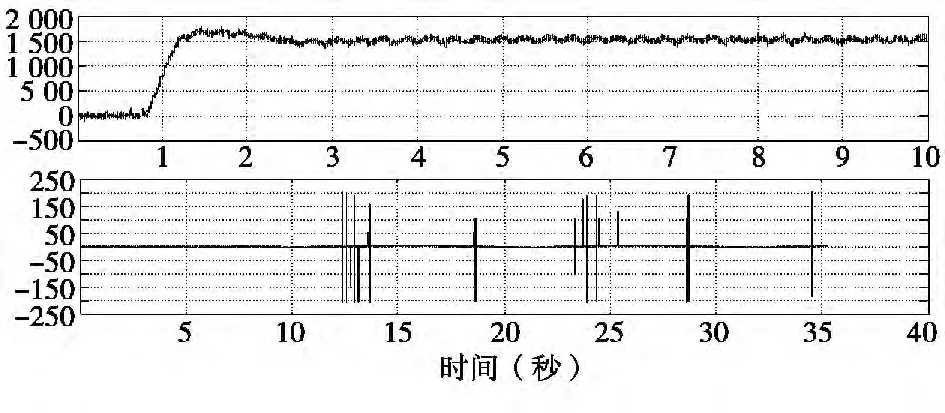
图4 X 轴陀螺角速度变化曲线及加速度曲线
5 结论讨论
采用陀螺和加速度计的微惯性测量系统体积小、功耗低,能很好地实现对飞行体姿态的数据采集,可以满足测量单元性能指标的要求。两种传感器信息的融合使得精度更高,误差减小。该测试系统适用于很多场合,后续将采集到的数据利用算法软件进行处理分析,便可以解算出姿态测试所需要的参数,有进一步研究的意义和必要性。同时,在试验过程中也发现每一次信息的读取都需要将测试装置拆下来连接数据线读取,若能在系统中集成小型无线数据传输模块,便可能解决这个问题。这也是后续为提高工作效率需要改进的。
[1]崔中兴.惯性导航系统[M].北京:国防工业出版社,1982:60-96.
[2]张树侠,孙静.捷联式惯性导航系统[M].北京:国防工业出版社,1992:34-39.
[3]马凯臣.基于微惯性测量单元的末敏弹稳态扫描参数测量方法研究[D].太原:中北大学.2012.
[4]葛淑兰,石学法,张伟滨.地磁场相对强度研究方法[J].海洋地质与第四纪地质,2007(4):65-69.
[5]郭凤霞,张义军,言穆弘.地磁场长期变化特征及机理分析[J].地球物理学报,2007,11(50):1649-1657.
[6]朱仕永.导弹囊抛子弹动态参数测试及其姿态仿真[D].太原:中北大学,2009.
[7]曹咏弘,祖静,林祖森.无陀螺捷联惯导系统综述[J].测试技术学报,2004,18(3):269-273.