涡轮发电机转速测试系统设计
2015-11-28任达陆
任达陆,王 利
(中北大学机电工程学院,山西 太原 030051)
涡轮发电机依靠高速气流旋转,不但为引信工作提供电源,而且其输出脉冲的大小在某种程度可以算出子弹的飞行速度[5]。子弹在空中发射后,,涡轮电机检测到的脉冲频率、幅度与子弹的飞行速度有密不可分的关系。因此,测量涡轮发电机输出信号的频率和幅值可以得出弹丸飞行速度,并获得弹道特征,同时也可以获得引信工作状态。涡轮发电机输出信号的频率和幅值是通过测涡轮发电机的转速获得的,因此,测量涡轮发电机的转速对于引信来说,尤其对应用广泛电引信来说是非常重要且必不可少的。
本课题以单片机为中心,设计的全数字化涡轮发电机转速测量系统,不只适用于引信,它在军用工业控制和通用电器中也有巨大的使用价值。
1 涡轮电机转速测量系统的设计思路
1.1 转速检测的一般方法
通常情况下电机转速测量系统组成内容,转速测量流程图如图1。
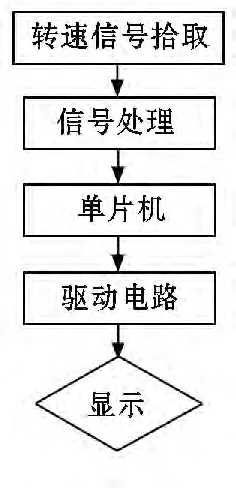
图1 转速测量
1.2 转速信号拾取
有的传感器很简单,只由一个敏感元件组成,它感受被测量时直接输出电,有的传感器则不同。当需要使用传感器进行收集信号时,我们将敏感元件和其测量电路、传递机构搭配成所需要测量的功能进行测量转换。比如土壤湿度传感器只是把土壤的温度转换成可以处理的电压或电流信号(一般是电压,根据工作的原理输出其电量)。
1.3 整形和倍频
传感器输出的信号不能直接连接单片机,这是因为需要将信号处理成符合单片机需求的信号类型,且由于系统传感器部分硬件电路设计的情况和对所使用的传感器不同,并且复杂的实际情况,都会对所获得的信号造成负面影响[2]。我们可以使用触发器电路来整形;除此之外,要处理转速时测量精度问题及码盘的刻度误差所造成的精度下降问题,我们可以使用倍频电路。采用的方法即在涡轮每转一圈,来相应的增加脉冲的个数,以便提高获得的精度。
1.4 单片机
在整个涡轮发电机转速测量系统设计中,单片机作为一个重要的交通枢纽,作用着对发来的脉冲信号的采集、运算以及转速计时等多方面需求,其次,将得到的转速脉冲信息经过单片机的计算分析后,再次把信号发送到串口上,使用液晶显示器或者数码管都可以显示出来[3]。根据涡轮发电机的应用情况由于考虑数据的准确性、可靠性,传感器类型和编程的简化,本文将首采用89C51 单片机。
2 硬件和软件设计总体方案
2.1 硬件设计方案
本转速测量系统由光电传感器HC-020K、单片机和显示器等构成。传感器部分采用SH130076S 光电传感器,负责将被测量的转速转化为脉冲信号,通过LM393 芯片处进行处理,再将脉冲信号送进单片机整理所获得的数据[4]。使用的单片机与上述一样AT89C51,之后显示器采用4 个7 段LED 数码管动态显示。
各部分模块一些功能:
1)光电传感器:主要是收集信号。
2)放大和整形电路:将传感器所测得到的信号进行放大和整形,再经过单片机后进行所得数据处理。
3)单片机:把处理后的信号通过软件编程得到实际转数,并送入LED 液晶或者数码管进行显示。
4)LED 显示:即该测量系统的显示部分。
2.2 软件设计思路
我们在编程时候需要主要解决外部中断的编写和内部定时器的使用,可以同时测量转速的一定范围,所以低速和高速都要在这个范围之中,需要进行四字节到三字节程序的编写。最后结果中则只需要把二进制转换成十进制数位,然后把结果转换成非压缩BCD 的程序,只有这样最终把测速结果准确的显示出来。
软件运行步骤:光电码盘发出一个T 内的所有脉冲送入单片机的外部中断即P3.5 口,便产生一个中断信号,定时器此刻开始定时,使用软件将记数器和定时器0 中断的次数设定为初始两个高位字节。再将TH0、TL0 初始值设定为0,用作两个低位字节。若干个中断完毕后读出此时记数的个数便得到电机转速,进而把结果一系列变换后显示程序,最后送入数码管。
软件设计转速程序思路:将接收到的传感器信号送入外部中断P3.5 口。主要是设计编写单片机外部中断服务程序INT0,将记数值的三个字节读取,不断的再次清0 记数初值循环计算下次的记数。调用子程序BCD 用于三字节十进制(BCD)两字节二进制的转换,再一并转化为十进制,最后送入显示部分。
3 涡轮发电机转速测量系统的转速分析
本涡轮发电机转速测量系统可以使用M 法进行测速,由于它的硬件电路较为简单,其测量方法所适合的测速范围后文将分析,测量的精度在本次实验中需要通过传感器的设置和型号来控制。
1)在本软件设计中,闸门时间预设为1 s,T1 所容许的计数值为65 536,所以,其计数量在1 s 内最大值不会大过65 535,便可得出此阶段最大计数频率L。设电机计数频率为f,它的周期是l/f,当计数累积成65 535 个数据时,此时周期是:
T=65 535* 1/f
所以按以上的要求:每当T=1 s 时,这时极大值是L=65 535* l/f
因此:f=65 535(Hz)
2)此次进行试验测量时,我们配置了20 点的码盘,则每转过一圈,会产生20 个脉冲,所以,轴的频率是:
f=65 535/20=3 276.75(Hz)
计算成转速是:
n=f* 60=196 605(r/min)
3)采用这种计算方法我们可以得到一种理想的转速数值。如果依然达不到最终的要求,则还可以换一种软件进行计时,就可以增大它的最高限度,进而它的最大限度只跟定时器和计数器最高允许的输入频率有关联,但由于此时的晶振为11.059 2 MHz 的,所要求的频率会达到500 kHz,因为对所测量的物体特性进行重点分析,所以,可以使用容易达到M 法来测量,其上限也完全能达到我们的需求。采用这种测速方法的下限实际上也很低,但是转速如果低到一定值时,则其误差会很大,所以,它允许的测量误差和测速下限有不可分割的关系[5]。
4 结论
4.1 硬件电路
单片机用于转速测量方法有很多,在硬件设计上要因其要求、功能和使用场合不同,使用的电路也完全不同,80C5l系列的单片机有用80C3l 和80C5l 等,再进行扩展和延伸,串口使用的是8155、7279A 等作为最后的显示。涡轮发电机所使用的是89C51 单片机,因为可以最大化地利用该单片机里本身所带的两个16 位定时器和计数器来进行设置,充分的发挥了该种单片机自己所带的明显优点,采用的接口为89C5l 的P0 口,因为它有很强的电流驱动能力等明显的特点,可以用来拓展所使用的试验芯片,然后通过单片机来控制,极尽可能简单化了部分硬件电路。有明显的发展优点且较高的性价比,在整个测速行业中,不仅可用于工业控制中的转速检测系统且民用电器等范围中也可涉及到。
4.2 测量方法
我们之所以采用M 法进行测量,这是由于单位时间短时间内首尾脉冲可能测不到,便容易产生较高的误差。所以M 法适合测量高速,也可以提高编码器,使用一次采集的脉冲数多些。
4.3 改进和展望
关于涡轮发电机叶片转速的定时时间长短是不同的,由于我们可以人为估计初始值,则需要根据其具体实际的应用不用,通过涡轮发电机转速的现实情形用来增大或减少定时时间。在机械能转化为电能的能量转变中,涡轮发电机的输出与涡轮叶片的转速具有一定的关系,电机的转速决定了引信供电系统的持续输出能力,未来工作可以对这个方向进行研究。
[1]何立民.单片机应用技术选编[M].北京:北京航空航天大学出版社,1997(3):45-50.
[2]张有德.单片微机原理、应用与实验[M].上海:复旦大学出版社,1997.
[3]李朝青.单片机外围数字IC 技术手册[M].北京:北京航空航天大学出版社,1998.
[4]梁廷贵、王裕琛.现代集成电路实用手册[M].北京:科学技术文献出版社,1999:33-36.
[5]于海生.微型计算机控制技术选编[M].北京:清华大学出版社,1999.