基于模型匹配的后轮主动转向车辆μ综合控制研究
2015-11-28滕冬冬孙骏冯能莲
滕冬冬,孙骏,冯能莲
(1.合肥工业大学机械与汽车工程学院,安徽合肥230009;2.北京工业大学环境与能源工程学院,北京100124)
主动安全技术是指能改善车辆操纵性和稳定性的技术,而后轮主动转向系统是实现性能提升的有效手段。传统的基于经典控制理论设计的后轮主动转向系统,如定前后轮转向比、具有一阶滞后的转向系统等,其局限性在于设计时所考虑的对象是基于近似和简化基础上的线性模型,但系统是否具有良好的动态性能,并对模型、测量噪声等不确定因素具有稳健性并不能确定。鲁棒控制理论是处理不确定问题的有力工具,因而具有自适应能力的鲁棒控制理论成为研究热点[1-3,5,7-11]。在鲁棒控制器设计方法中,H∞控制存在保守性问题对系统的鲁棒性能有一定影响[3],因此在H∞控制器的基础上设计了μ控制器,能有效处理鲁棒稳定性和性能折中的问题。为此提出用鲁棒模型匹配的方法来设计控制策略,将参考的前轮转角以及横摆角速度、侧倾角速度直接反馈到控制器输入端来加快信号响应,以匹配参考的模型为目标来设计μ控制器。
1 系统模型建立
1.1 整车动力学模型
建立具有侧向、横摆与侧倾运动的3-DOF 数学模型来研究车辆的操纵性能。如图1所示,x0y0z0为大地坐标系,xyz为车体坐标系。忽略纵向、垂向以及俯仰运动,认为汽车的簧上质量绕车身的质心转动、车身关于x-z 对称。同时忽略由于载荷变化引起轮胎特性的改变,认为轮胎的侧向力与其侧偏角是线性关系[4]。
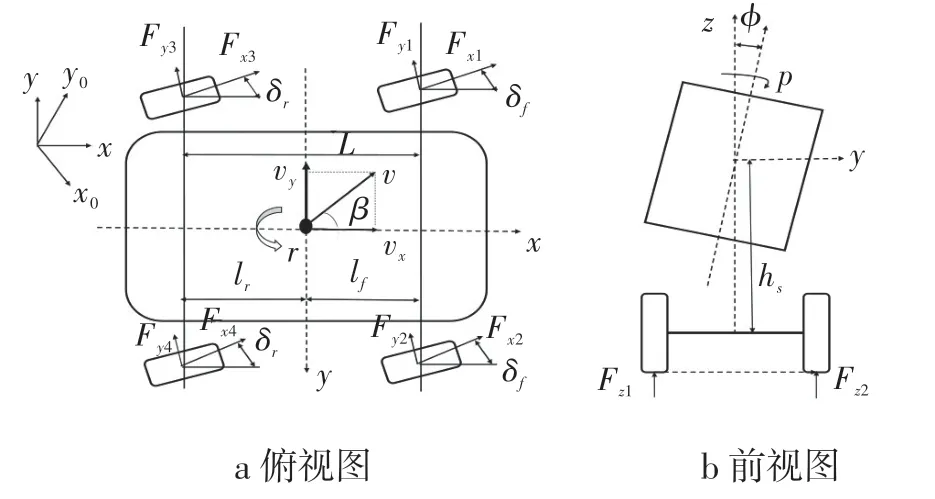
图1 转向动力学示意图
建立整车动力学模型如式(1)~(3)所示:
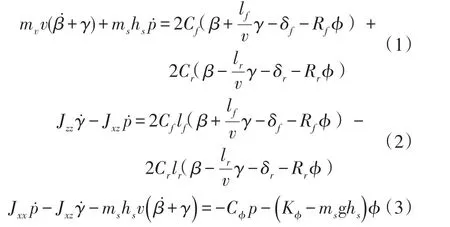
式中:mv为整车质量;ms为簧上质量;v为车辆的纵向速度;β为质心侧偏角;φ为侧倾角;γ为横摆角速度;hs为质心高度;p为侧倾角速度;Cf,Cr为前、后车轮侧偏刚度;lf,lr为质心距前、后轴的距离;δf,δr为前、后轮转角;Rf,Rr为车身侧倾因子;Jzz为绕z轴转动惯量;Jxz为悬挂质量对x轴和z轴的惯性积;Jxx为绕x轴转动惯量;Cφ,Kφ为侧倾阻尼系数与刚度系数。
定义EUx=AUx+BUu,则
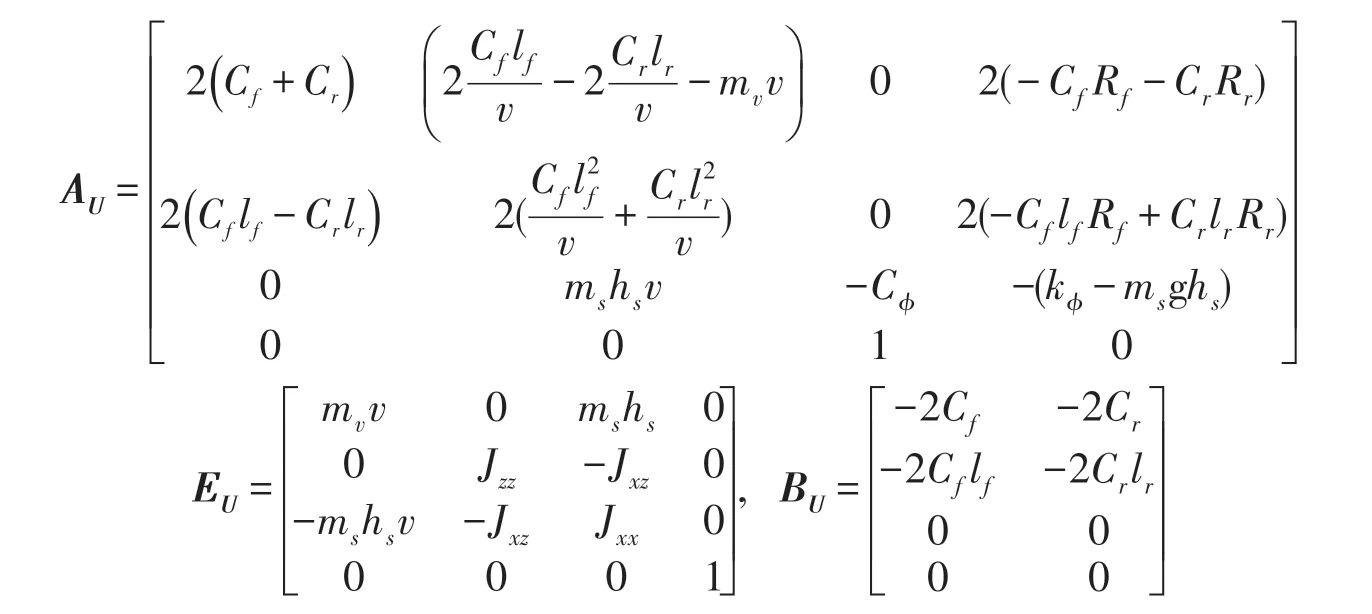
其状态空间表达式为


由此确定车辆的标称数学模型,为进行μ综合奠定了基础。
1.2 转向执行器模型
当转向系统的阻尼与刚度与车轮的转动惯量相比足够高时,前、后轮的转向运动近似为二阶线性系统[5]。

式中:Df,Dr为前、后转向系统阻尼比;wf,wr为无阻尼自然频率;δsf,δsr为前、后轮转角的指令信号;δf,δr为前、后轮的实际转角。
1.3 参考状态模型
参考横摆角速度和质心侧偏角是车辆状态的理想值,为了便于设计控制器,选择线性二自由度参考模型[6]。参考模型用状态空间表达式描述:

取状态量xi=[β*,γ*]T,则
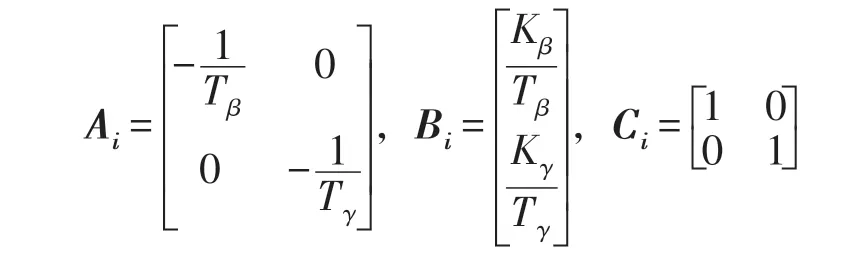
增益Kβ=0,取时间常数Tβ=Tγ。
2 μ 控制器设计
2.1 互联系统结构及加权函数选择
后轮主动转向系统的控制目标如下[7]:1)保证操纵性能,使通过控制得到的横摆角速度跟随参考值,且误差eγ即(γ*-γ)在低频段为最小;2)减小车辆质心侧偏角和侧倾角速度,使得车辆具有良好的车身稳定性能;3)降低由未建模动态对控制系统的干扰,保证控制系统具有良好的鲁棒稳定性;4)减小传感器噪声、外界干扰对控制系统的影响,提高系统的鲁棒性能。
考虑到系统的建模误差、传感器噪声以及外界干扰的影响,建立如图2所示控制系统结构。其中V-nom为标称系统模型;ideal为参考状态模型;Af,Ar分别为前、后轮转向执行器模型;Win为不确定加权函数;Wβ,Wγ为性能加权函数;Wact为输入加权函数;Wn为噪声干扰加权函数。
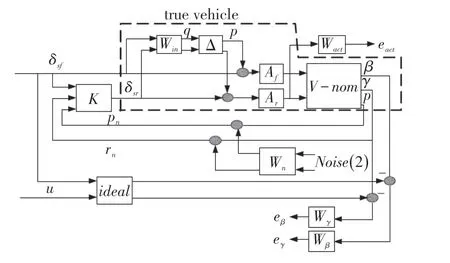
图2 控制系统结构框图
鲁棒控制器设计的关键是加权函数的选择。在设计控制系统时,考虑到执行机构模型的简化及整车模型线性化的误差,可将这些问题转化为线性系统的不确定性问题加以处理[8]。基于对模型了解的精确性,设定穿越频率100Hz,在低频段有20%的建模误差,高频段有250%的建模误差,此时未建模动态开始起主要作用。取不确定性加权函数

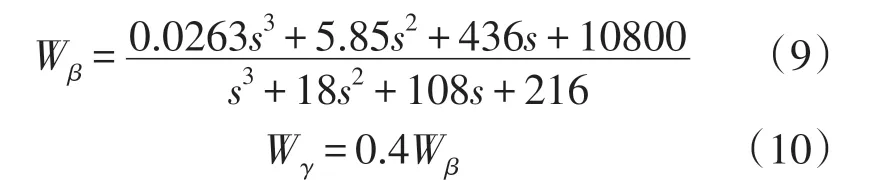
要获得每个被控输出的跟踪精度,要求灵敏度函数(Wr-1和Wβ-1,反映灵敏度函数的幅值范围)要小,因此可以要求质心侧偏角在低频性能段稳态误差小于0.02 rad;在低于带宽频率范围内按照约为21dB/10倍频来改善性能;在高频段由于非线性因素的作用,可以降低对跟踪精度的要求。取性能加权函数
滤波器Wact用于限制后轮转角执行器的挠度幅值,限制后轮转角最大值为5°。

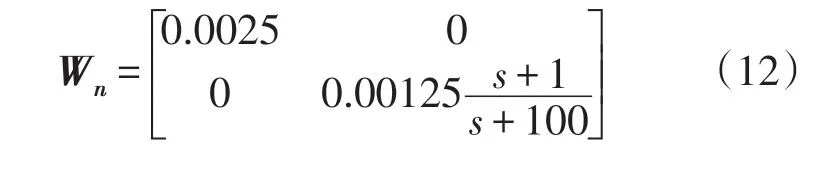
Wn为高通滤波器,用来模拟反馈通道中引入的传感器噪声干扰[9]。
2.2 控制器设计
为了获得μ 综合的开环连接结构,断开实际闭环系统与摄动和控制器的连接,成为一开环系统,如图3所示。

图3 开环链连接结构

μ综合的目的就是在所有稳定的控制器K中,最小化闭环传递函数Fl(IC,K)的μΔ~(·)(增广摄动矩阵的结构奇异值)的峰值。即

μ控制器的设计,是根据设计出来的H∞控制器K,采用D-K 迭代算法来进行系统鲁棒稳定性和鲁棒性能的寻优。

表1 车辆参数
2.3 μ控制器降阶处理
基于表1中的车辆参数,经过3次迭代得到26阶μ控制器。由于μ控制器阶次较高,在计算和实际应用上都有困难,因此需要降阶处理[11]。采用最优Hankel 范数近似方法进行降阶,降为14阶时其控制器的奇异值在整个频率段与全阶误差几乎为0,得到降阶μ控制器(以下均以降阶后控制器代替μ控制器)。
2.4 控制器对比分析
用μ分析法对设计的降阶后μ控制器和H∞控制器进行鲁棒稳定性和性能分析,得到其结构奇异值曲线如图4所示。

图4 鲁棒稳定性与鲁棒性能分析
图4a表明:在整个控制频段内,μ控制器和H∞控制器的μ值都小于1,能使系统保持良好的鲁棒稳定性能,且H∞控制器的μ值要比μ控制器的小,说明H∞控制器鲁棒稳定性好。但从图4b可以看出在低频段μ控制器的结构奇异值小于1时,有良好的鲁棒性能,而H∞控制器在低频段其结构奇异值大于1时,鲁棒性能较差。说明H∞控制方法仅考虑鲁棒稳定性而忽略了鲁棒性能要求,但μ控制方法能有效处理稳定性与性能的折中问题。
3 仿真试验验证
3.1 阶跃工况
采用前轮转角阶跃输入来验证控制器的瞬态响应特性,设置在0.5 s时阶跃输入0.04 rad 前轮转角,分别采用2种控制器进行仿真,结果见图5。
图5表明:2种控制器与无控制相比能明显降低其调节时间,以及具有良好的控制超调的能力,稳态值更低,使车辆具有良好的瞬态性能。图5a表明:μ控制器瞬态性能的上升时间以及调节时间比H∞控制器的要小,同时其稳态值更接近参考值,但其最大超调量比H∞控制器的要大。说明μ控制器虽然在控制超调方面略差,但表现出更快的响应速度且稳态误差更小。图5b为质心侧偏角响应曲线,μ控制器的稳态值相比H∞控制器要小,在操纵稳定性方面更突出。
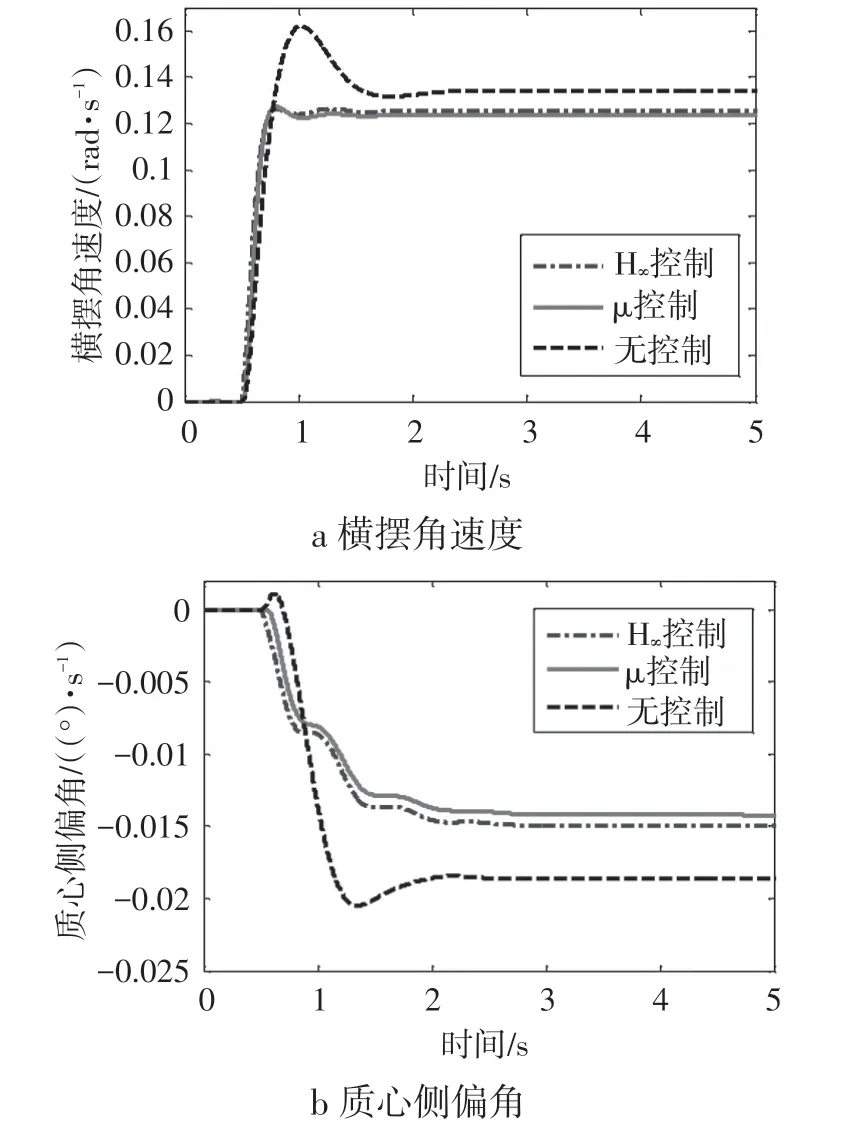
图5 阶跃工况仿真结果
3.2 双移线工况
在CarSim中建立闭环双移线仿真工况,车速为108 km·h-1,通过车辆行驶参数来衡量行驶稳定性。因μ控制器与H∞控制器双移线试验工况响应特性比较接近,为了验证μ控制器的性能,仅对μ控制器与CarSim中控制器进行比较。设置接口参数,定义导入变量为后轮转角,导出变量为前轮转角、横摆角速度、质心侧偏角,建立CarSim-Simulink联合仿真试验模型如图6所示。
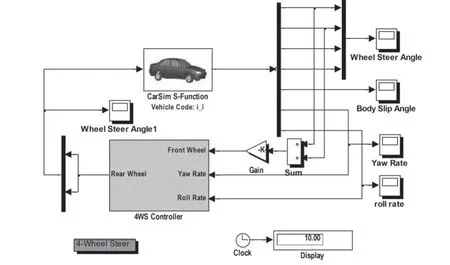
图6 联合仿真试验模型
仿真试验结果见图7。图7a为μ控制后四轮转角输出;图7b为2种控制器与无控制行使轨迹对比,可看出μ控制后车辆能按参考路径行驶,相比CarSim中控制器其跟随参考路径几乎无差别;图7c表明μ控制器与CarSim中控制器都能降低其横摆角速度,μ控制器相比在幅值处更小;图7d表明μ控制器控制后的质心侧偏角小于0.3°,与无控制相比大幅降低;图7e表明CarSim中控制器控制后的侧倾角速度与无控制差别不大,但μ控制器能实现侧倾角速度的有效控制,这与该控制策略将侧倾角速度作为反馈控制变量一致。图7表明2种控制器相比无控制都能有效降低关键变量,显著改善车辆稳定性,但μ控制器能更好地稳定性能。
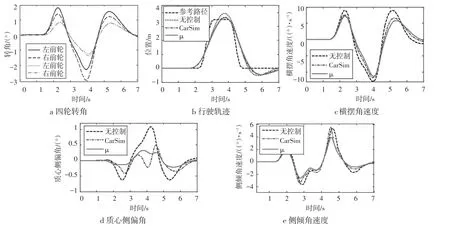
图7 双移线工况仿真结果
4 结论
基于模型匹配控制策略设计的μ控制器,在整个频率范围内具有良好的鲁棒稳定性,虽然低频段H∞控制器比μ控制器鲁棒稳定性要好,但μ控制器在这一频段有更好的鲁棒性能,能更好地抑制外界干扰的影响,能有效地处理带宽频率范围内鲁棒稳定性和鲁棒性能折中问题。
阶跃工况仿真结果表明:μ综合控制器相比H∞控制器可使车辆获得良好的瞬态响应特性且稳态误差更小,车辆操纵稳定性能更佳。基于非线性仿真软件CarSim进行双移线工况联合仿真,仿真结果表明μ综合控制器能有效地改善车辆的关键变量,保证车辆良好的操纵稳定性。
[1]Yingmin Jia.Robust Control with Decoupling Performance for Steering and Traction of 4WS Vehicle sunder Velocity Varying Motion[J].IEEE Transactions on Control System Technology,2000,8(3)∶554-569.
[2]李铂,陈善华.基于回路成形和μ综合的后轮主动转向鲁棒控制[J].汽车工程,2006,28(4):370-375.
[3]杨斌虎,杨卫东,陈连贵.基于结构奇异值μ综合的热轧带钢AGC鲁棒控制[J].控制理论与应用,2008,25(3):299-302.
[4]Xiujian Yang,Zengcai Wang & Weili Peng.Coordinated Control of AFS and DYC for Vehicle Handling and Stability Based on Optimal Guaranteed Cost Theory[J].Vehicle System Dynamics,2009,47(1)∶57-79.
[5]Tilman Biinte,Dirk Odenthal,Bilin Aksun-Giiven,Levent Giiven.Robust Vehicle Steering Control Design Based on the Disturbance Observer[J].Annual Reviews in Control,2002,26(2)∶139-149.
[6]Shino M,Nagai M.Yaw-moment Control of Electric Vehicle for Improving Handling and Stability[J].JSAE Review,2001,22∶473-480.
[7]Guodong Yin,Nan Chen,Pu Li.Improving Handling Stability Performance of Four-Wheel Steering Vehicle via μ -Synthesis Robust Control[J].IEEE Transactions On Vehicular Technology,2007,56(5):2432-2439.
[8]Doyle,J.Structured Uncertainties in Control System Design[C].Proceedings of the 24th Conference on Decision and Control,Lauderdale,1985:260-265.
[9]季鹏凯,沈斌,陈慧,章桐.主动转向系统鲁棒控制的研究[J].汽车工程,2013,35(12):1092-1098.
[10]史忠科,吴方向,王蓓,阮洪宁.鲁棒控制理论[M].北京:国防工业出版社,2003.
[11]Sigurd Skogestad,Ian Postlethwaite.MULTIVARIABLE FEEDBACK CONTROL Analysis and Design[M].Chichester·NewYork·Brisbane·Toronto·Siagapore∶JOHN WILEY&SONS,2001.
