基于组件的机载电子对抗仿真系统设计*
2015-11-28邓健王星程嗣怡陈游商龙
邓健,王星,程嗣怡,陈游,商龙,2
(1.空军工程大学航空航天工程学院,西安710038;2.解放军93802部队,陕西咸阳712201)
基于组件的机载电子对抗仿真系统设计*
邓健1,王星1,程嗣怡1,陈游1,商龙1,2
(1.空军工程大学航空航天工程学院,西安710038;2.解放军93802部队,陕西咸阳712201)
由于现实中电子对抗作战的不可重复性与不可预见性,系统仿真技术成为研究电子战的重要手段。以机载电子对抗作战仿真实验为背景,设计了一种采用可重构“积木式组件”的分布式机载电子对抗仿真系统,提出了基于原子/复合组件开发的系统设计方法,以核心组件ESM的设计为重点论述了组件设计思路,最后给出仿真实例。应用结果表明,该系统为研究机载电子对抗实验提供了一种强有力的手段。
电子对抗系统仿真,系统开发,组件技术,原子组件,复合组件
0 引言
对机载电子对抗作战的研究需要对电子战飞机及其作战环境进行模拟仿真,同时要为电子对抗效能评估提供仿真数据,这是一个复杂的仿真系统设计过程,并且如果局部设计出现问题就将耗费大量人力物力进行修正。为了克服以上困难,我们采用了“积木式组件”化的设计方法。基于组件的软件设计方法是一种利用可重构的软件组件构建应用系统的技术,组件对象的可重用性与一般的C++面向对象语言不同,它只通过接口提供服务,基于组件的系统由多个组件搭建组成,进行程序修改时将构成程序的某个组件用新版本替换即可,提高了编程效率[1]。
本文以机载电子对抗装备性能模拟和机载电子对抗战术使用策略为研究对象,以关键组件ESM的组件化设计为例说明了基于原子/复合组件开发的系统组件开发流程,系统中专门的数据记录分析软件也能为电子对抗复合干扰策略的研究提供仿真数据支撑。最后,介绍了系统的仿真工作流程,通过仿真实例给出数据,分析并得出相应结论。
1 系统总体架构与工作流程
机载电子对抗仿真系统由作战想定编辑系统、机载电子战战场环境支持系统、仿真兵力生成系统、仿真案例设计、仿真部署及运行控制系统和仿真战场态势显示系统组成,如图1所示。
机载电子对抗仿真系统各部分的功能:
①仿真想定编辑是根据作战任务制定相应的想定仿真文书,在已有的想定数据库中选择所需的想定,也可以根据机载电子战作战任务需要在线编辑想定内容;②机载电子战战场环境支持系统是存储战场地理信息、电磁信息和气象信息的数据库,进行仿真场景的态势显示和战场环境显示;③仿真战场态势显示系统能够实时显示战场的态势信息,实现仿真作战过程和仿真效果的可视化;④仿真兵力生成系统根据作战想定的内容,将所需加入仿真的兵力实体部署到其初始位置上,作战兵力生成依据兵力组件以及相应的装备参数库以及决策规则初始化各仿真兵力单元;⑤仿真部署及运行控制系统加载作战实验方案,根据实验方案控制仿真运行的流程,同时提供仿真所需的底层通信支持。
2 机载电子对抗仿真系统原理
2.1电子支援措施ESM
电子支援措施(ESM)是电子战的信息源,利用电磁辐射支援军事行动[2],其主要功能为:①探测敌射频辐射;②测量敌关键参数;③识别辐射源。对于机载ESM系统而言,它必须足够灵敏以接收每一个微弱的旁瓣辐射,ESM系统记录侦察到的信号所到达时间并测量到达的角度与频率并将信号分类,最后将测定参数与已知的存储在知识库和数据库中的参数做对比,从而进行辐射源识别[3]。
2.2ESM功能模型
2.2.1坐标系转换
仿真中采用的是以观测点为坐标原点的空间直角坐标系,其y轴与原点的法线方向重合,指向地球外,x轴指向大地北方向,z轴与x、y构成右手坐标系。一般雷达装备以及接收机的位置信息由地理纬度、经度、海拔高度来确定,采用的是WGS84坐标(地心坐标)。在进行计算时,需要进行坐标转换:由地心坐标转换为大地空间直角坐标系,再转换成所需要的以观测点为原心的空间直角坐标系(垂线坐标系),其过程如下:
由经纬度换算为地心直角坐标系——雷达位置坐标用经纬度表示为:纬度B,经度L,高度H;换算为地心空间直角坐标X,Y,Z的换算关系为:

转换为地心空间直角坐标以后,需要计算敌机相对于我机的距离、方位角和俯仰角。
2.2.2截获条件计算
雷达信号如果可以被ESM接收机截获,雷达信号对应的工作状态可以被ESM接收机读取。ESM然后对多部雷达、每个雷达多个通道、每一个通道的不同波束参数进行参数测量和信号分选识别、威胁等级排序等。如果雷达信号未被截获,则不需要进行计算。
通过坐标转换,得出目标雷达相对于电子战接收机的方位角、俯仰角和距离信息,直接获取敌方雷达的载频信息,通过比较雷达信号是否在ESM接收机的测频、测向范围内,即如果雷达信号满足式(2)可以截获:
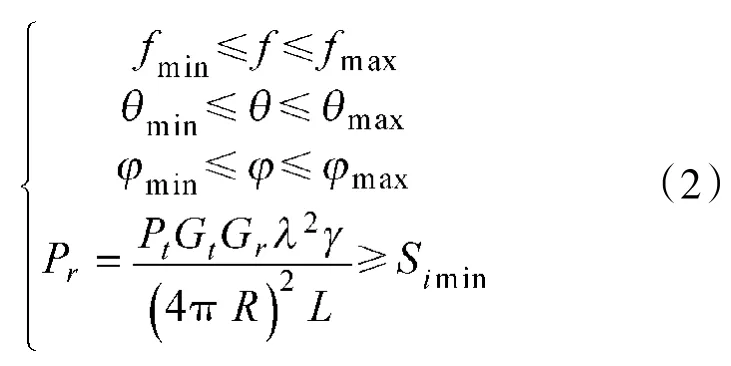
其中Pt为雷达信号发射功率、Gt雷达信号发射天线在本机ESM方向上的发射增益(由当前雷达的波束指向和本机相对于目标雷达的方位角和俯仰角之差查询雷达天线方向图获取)、Gr为ESM接收天线增益(根据目标雷达相对于本机的方位角和俯仰角读取本机ESM接收机天线增益数值),λ为雷达信号波长,γ为极化和馈线损失,一般取为固定值0.25,R为目标雷达距离本机ESM距离,L为雷达信号空间传输损耗,通过雷达信号频率和天气状况进行设置。
2.2.3参数测量
参数测量模型是在接收的雷达信号参数(频率、脉宽等)和计算得到的方位角、俯仰角和距离值上加入ESM的参数测量误差作为ESM的参数测量结果,提供给ESM输出和ESM继续做信号分选和威胁等级判定。参数测量模型表示为图2所示:
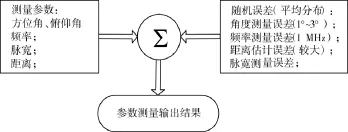
图2 参数测量模型
2.2.4信号分选识别
对截获的信号进行参数测量以后,需要对每一个波束信息进行信号分选和识别,以确定在固定时间(间隔)内接收到的雷达信号波束是否是属于同一雷达的波束,以及对该雷达工作状态信息的读取。信号分选流程如图3所示。
对输入的多部雷达、每个雷达对应的多个波束逐次进行分选识别和工作状态判定以后,确定了哪几个波束是属于同一部雷达,并读取对应的雷达工作状态,该雷达的工作状态确定以后进行该雷达威胁等级的判定。
2.2.5威胁等级判断
威胁等级判断是进行干扰资源分配或者火力打击的重要依据。采用模糊多属性决策直接线性加权的方法来确定电子对抗系统作战对象的威胁等级。机载电子对抗系统的作战对象包括空中和地(海)面的各种雷达。结合战机作战特点,雷达威胁等级主要考虑雷达类型、工作状态、与本机的距离等3个因素。威胁等级表达式为:

式(3)中,wi为第i部雷达的威胁等级,假设空中和地面雷达的数目为N,N部雷达的威胁等级记为W=[w1,w2,…,wN],wi=wi(i=1,2,…,N),P为雷达类型威胁因子;Q为雷达工作状态威胁因子;R为雷达距离威胁因子;μi(i=1,2,3)为各因子所占权重值。由层次分析法确定,且满足μ1+μ2+μ3=1。
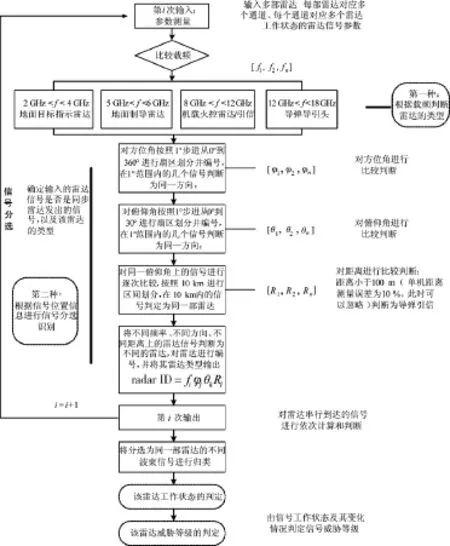
图3 信号分选流程图
雷达类型和工作状态可以根据雷达信号载频、重频、脉宽等参数与辐射源数据库比较得出;距离信息可以通过本机有源或者无源探测系统获得。P、Q和R均为区间[0,1]内的数值,最后确定的威胁等级也是[0,1]内的一个数值。
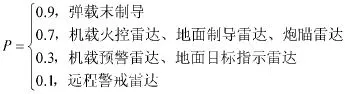
机载电子对抗系统作战对象包括弹载末制导雷达、机载火控雷达、地面制导雷达、炮瞄雷达、机载预警雷达、地面目标指示雷达和远程预警雷达等,雷达类型威胁因子的属性值确定如下:
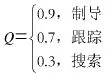
雷达的工作状态可以划分为搜索、跟踪和制导等3种状态。状态威胁因子的属性值确定如下:
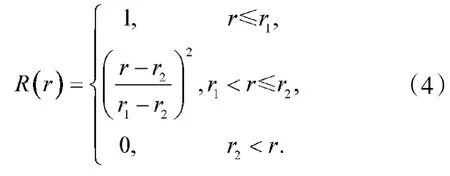
对于机载自卫电子对抗系统而言,当目标雷达与本机距离r小于最小威胁距离r1,即r≤r1时,其威胁程度R(r)最大,设为最大值1;当r大于最大威胁距离r2,即r≥r2时基本不对本机造成威胁,可认为R(r)为最小值0;同时R(r)随距离的逼近快速变大,因此,采用二次曲线作为其数学表达式,雷达距离威胁因子的数学表达式为
2.3原子组件与复合组件
原子组件(Atomic Component)是建立系统仿真模型的无须再分的基本单位,原子组件的定义如图4所示。在机载电子对抗仿真系统中,根据数据的传输特点,将组件的数据输入/输出消息分为两类,周期性数据的传递,定义为组件的接口;触发性消息,定义为事件。接口反映系统成员之间的信息传递,事件则反映系统成员在状态变化过程中的交互作用。

图4 原子组件
组件属性包括组件的性能参数和状态参数。性能参数确定机载电子对抗仿真实验过程中每个不同的兵力单元及该组件的作战能力。状态参数反映仿真过程中兵力单元的状态信息,组件状态参数的集合构成作战实验的战场态势。系统在进行作战仿真初始化时通过数据库加载组件性能参数实现对具体想定的仿真;在仿真实施过程中对组件属性的状态参数进行记录,用于仿真结束后的实验数据分析,通过组件属性状态参数的变化映射到仿真兵力单元上,从而形成作战态势的变化过程。
原子组件可实现的功能较为单一,为了实现对具有更复杂结构的装备和作战使用策略的软件描述,将功能关联的几个原子组件进行聚合封装为复合组件(Compound Component)。复合组件的定义如图5所示。复合组件将所包含的原子组件统一封装在一个大的框架中,其从整体外部结构上来说与原子组件是一致的,输入/输出接口、接收/发送事件和属性通过映射的方式与原子组件进行关联。
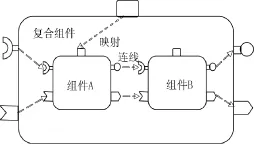
图5 复合组件
2.4ESM模型组件化设计
采用组件化的设计思想,可以较为方便地模拟出电子对抗系统功能上的模块化:ESM系统探测到的目标位置和雷达工作信息可以表征为组件的接口;组件的属性可以表征接收机的工作参数;组件的事件则可以表征ESM系统作出的信号分选与威胁等级判断等一系列措施。根据2.2中模型,设计ESM组件的接口关系如表1所示。
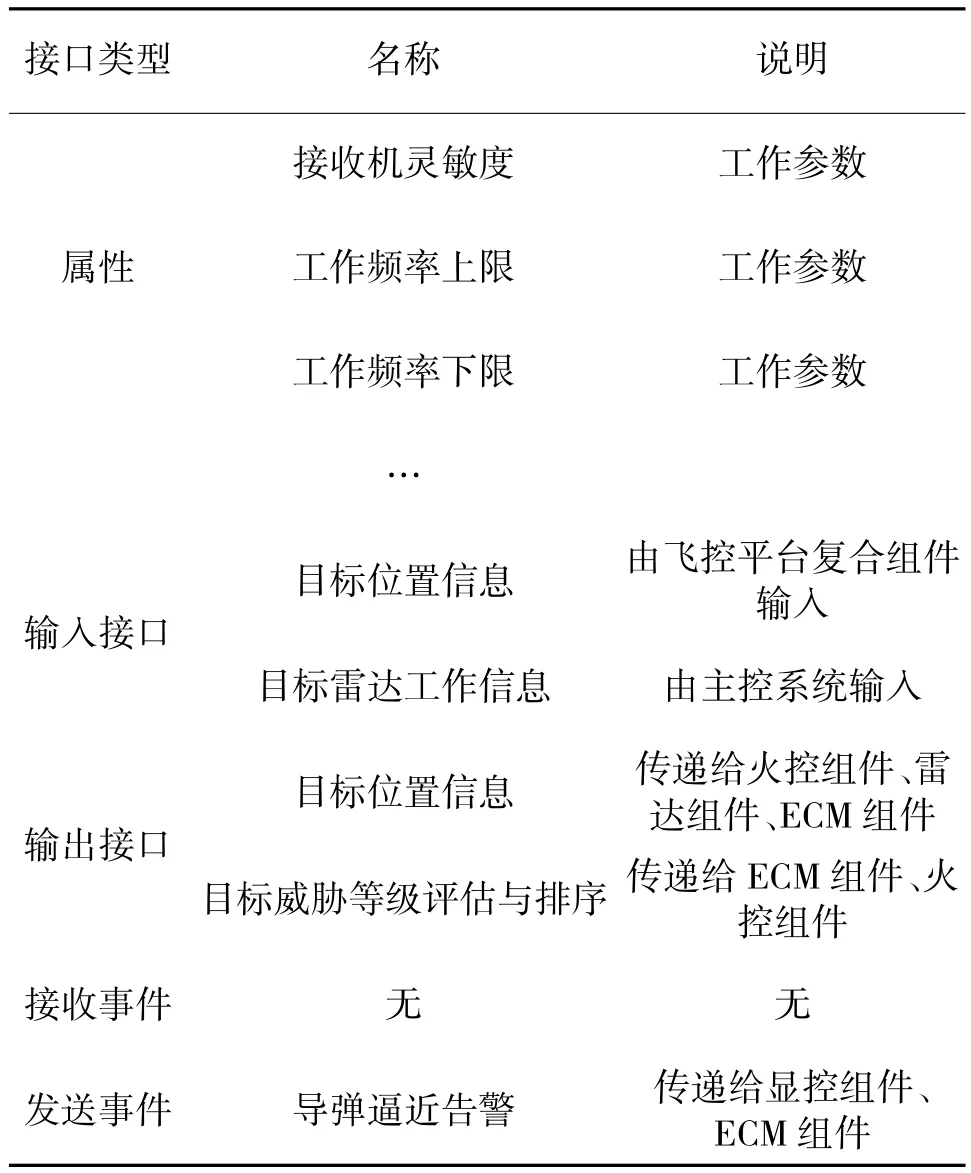
表1 ESM组件接口关系图
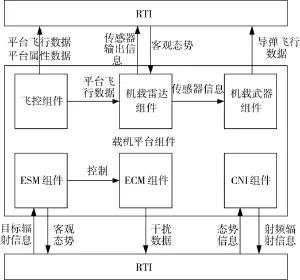
图6 载机平台联邦员生成图
其他组件的设计与ESM是一样的,各原子组件封装在一起组成系统中载机平台复合组件,载机平台复合组件结构如图6所示。该复合组件表示某一个作战飞机单元,其主要的原子组件有:飞控组件,其负责载机平台的飞行控制,根据飞行指令,产生载机平台的姿态信息、位置信息;机载雷达组件,其实现机载雷达搜索识别目标,跟踪目标和导弹制导功能;机载武器组件,系统中主要指的是空空、空地导弹;ESM组件,它是对机载电子支援系统的功能仿真,具有目标识别、威胁告警和干扰引导等功能;ECM组件,它是对机载电子对抗措施的功能仿真,根据ESM所形成的目标威胁数据列表,确定具体的电子对抗措施,施放干扰;CNI组件则是机载通信组件。
在组件开发之后,将其打包发布到实体中,实体开发完成后,将其添加到想定中,最后通过系统仿真资源部署,运行仿真工程。
3 仿真实例
某次仿真实验想定为:作战想定内容为蓝方两架飞机从海上突防红方某重要区域,红方在地面指挥所的引导下派出两架飞机进行拦截,以此为作战背景,分析电子战压制性干扰和欺骗性干扰战术使用策略对作战效果的影响。
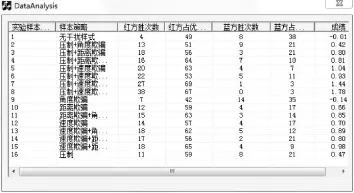
图7 仿真实验数据记录
实验数据统计结果如图7所示,欺骗策略的不同组合构成组合策略,作战效果即空中拦截成功率记录为成绩。对得到的实验数据采取直观分析的方法。首先,计算各因子水平均值,因子水平均值的计算是将实验结果按照因子所在列进行分组,分组的方法是将因子所在列水平相同的实验分为一组,计算各组的实验结果均值即为因子水平均值。对于实验因子压制干扰来讲,有两个水平,其水平为0即不采取压制干扰措施时,水平的均值计算通过计算第1列中压制干扰水平值为0的实验结果总和:T0=-0.01+(-0.14)+0.66+0.85+0.70+0.89+0.80+0.98= 4.73,则实验因子压制干扰的0水平均值为T0=T0/8= 0.59。采用同样的方法即可得到其他因子水平的均值。对于因子极差的计算,在本次作战实验实例中,因子的水平数均设为2,极差的计算只需用实验结果大的水平均值减去实验结果下的均值即可,对于因子压制干扰的极差R=T0-T1=0.37。因子速度欺骗、距离欺骗、角度欺骗的极差计算与压制干扰相同,对实验结果的分析计算数据如表2所示。
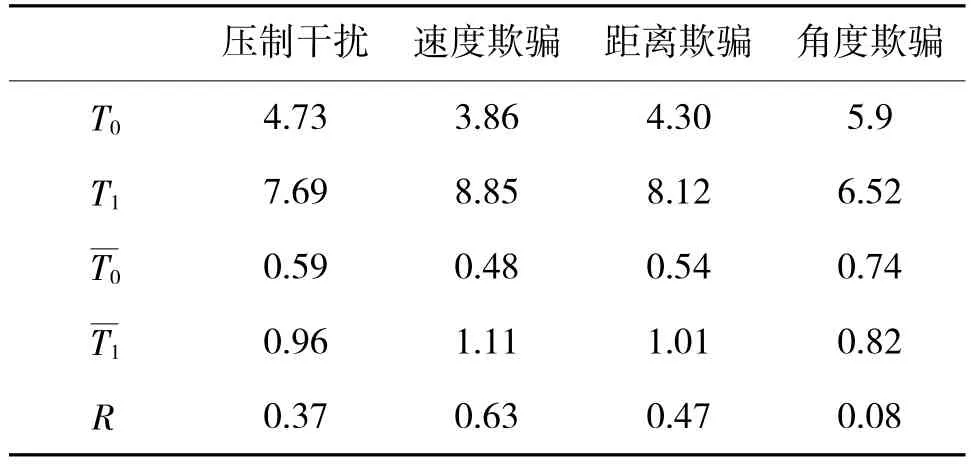
表2 仿真实验数据分析
将实验因子水平均值绘制到水平均值图中,如图8所示。通过图中显示可以看出各个单一因子的最好水平结果,仿真实验中因子水平最好的组合是:压制干扰+速度欺骗+距离欺骗+角度欺骗。同时,通过各因子均值图的线段端点差值也可看出因子速度欺骗对实验结果的影响最大。
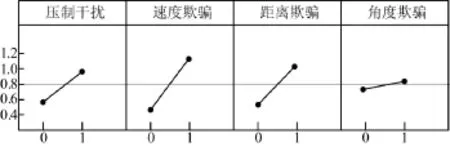
图8 各因子水平均值图
分析本次实验结果可以得出以下结论:
结论1:除单一使用角度欺骗策略作战效果比未使用电子对抗作战策略效果差外,其他电子对抗使用策略及其组合策略的使用都对空中拦截作战效果有较大的提升,且组合策略作用大于单一策略作用。
结论2:实验因子对实验结果影响从大到小的顺序是速度欺骗>距离欺骗>压制干扰>角度欺骗。
结论3:电子对抗多种策略联合中,压制性干扰策略和欺骗性干扰策略都能够起到较好的作用。
6 结束语
本文在机载雷达电子对抗作战需求之上,设计了基于“积木式”组件技术的机载电子对抗仿真系统,阐述了这种基于可重构式组件的仿真系统设计方法,简要介绍了系统模型的设计流程,不仅为机载电子对抗实验提供了一个有力的工具,也非常适合在战术演练、院校教学和实际研究中应用。
[1]余滨,张耀鸿.基于组件的C4ISR系统效能仿真环境[J].军事运筹与系统工程,2002,19(1):25-28.
[2]Skolnik M I.雷达手册[M].南京电子技术研究所译.北京:电子工业出版社,2010:971.
[3]Stimson G W.机载雷达导论[M].吴汉平译.北京:电子工业出版社,2005:864.
Design of an Airborne Electronic Countermeasures Simulation System Based on Component
DENG Jian1,WANG Xing1,CHENG Si-yi1,CHEN You1,SHANG Long1,2
(1.School of Aeronautics and Astronautics Engineering,Air Force Engineering University,Xi'an 710038,China;2.93802 Troops of PLA,Xianyang 712201,China)
Due to the nonrepeatability and unpredictability of real electronic warfare,system simulation technique becomes an important method for studying electronic warfare.With the airborne electronic countermeasure simulation experiment as the background,a distributed airborne electronic warfare simulation system which adopting reconfigurable“cordwood component”method is desinged,while a design idea which based on atomic/compound component development technology is proposed,using the design of core component ESM as example to explain this design thought,at last,a simulation case is given.Practical applications indicate that this system provides a powerful mean for studying airborne electronic countermeasure experiments.
electroniccountermeasuressystemsimulation,systemdevelopment,componenttechnology,atomic component,compound component
TN97;TP311;TP391.9
A
1002-0640(2015)08-0047-05
2014-07-16
2014-08-11
陕西省自然科学基金资助项目(2012JQ8019)
邓健(1989-),男,山东聊城人,硕士研究生。研究方向:电子对抗理论与技术,电子对抗仿真技术,系统仿真技术等