基于STK的“全球鹰”无人机成像侦察能力分析与仿真*
2015-11-28刘世一郝顺义赵晓林刘华伟孙立国
刘世一,郝顺义,赵晓林,2,刘华伟,孙立国
(1.空军工程大学航空航天工程学院,西安710038;2.航空电子系统综合技术重点实验室,上海200233;3.解放军95899部队,北京100085)
基于STK的“全球鹰”无人机成像侦察能力分析与仿真*
刘世一1,郝顺义1,赵晓林1,2,刘华伟1,孙立国3
(1.空军工程大学航空航天工程学院,西安710038;2.航空电子系统综合技术重点实验室,上海200233;3.解放军95899部队,北京100085)
对“全球鹰”无人机成像侦察载荷能力进行了分析与仿真。首先,总结“全球鹰”无人机侦察载荷的发展历程;其次对“全球鹰”载光电、红外、SAR 3种侦察设备以及MP-RTIP雷达进行了介绍;最后采用STK(Satellite Tool Kit)软件建立相应的场景,对“全球鹰”侦察能力进行可视化仿真设计,得出在同一航线条件下,不同传感器对固定区域的平均覆盖比率不同;仿真结果表明,“全球鹰”无人机采取的侦察航线会对传感器的工作效果产生影响,在作战中,要根据战场实际情况选择合适的传感器。
全球鹰,成像侦察,STK
0 引言
“全球鹰”无人机作为世界上最先进的高空长航时无人侦察机之一,目前分5个批次,分别为:B lock 0(B代表改装版本,0代表编号)、B lock 10、B lock 20、B lock 30和B lock 40,RQ-4A(R指reconnaissance的首字母,Q指无人机,4指无人机计划第4架样机,A或B指改装版本)为初始编号,从B lock 20开始编号改为RQ-4B。B lock 0型“全球鹰”无人机,是最早生产的试验型号,配备有光学传感器(Electrical Optical,EO)、红外传感器(Infra Red,IR)及合成孔径雷达(Synthetic Aperture Radar,SAR);B lock 20型“全球鹰”无人机,改进了RQ-4A的有效载荷,采用增强型综合传感器组件,使有效作用距离增加了一倍;另外,B lock 20的改进型MQ-4C,增加了一部主动电子扫描环视雷达,能跟踪和识别水面目标;B lock 30型增加了机载信号情报侦察载荷,实现了对信号自动搜索、探测识别和定位;B lock 40型装备的是“多平台雷达技术嵌入计划”(MP-RTIP)雷达,该雷达采用的是当今最先进的X波段主动式电子扫描阵列,功能上等同于一个全天候的多平台雷达传感器,提高了“全球鹰”无人机探测、跟踪、识别静止和移动目标的能力[1]。当前服役的B lock 10、B lock 20以及B lock 30型主要的任务都是战略侦察,实际上,正在研制中的B lock 40型才是真正意义上的无人机载对地监视系统[2]。“全球鹰”的改进过程如图1所示。

图1 “全球鹰”无人机系统侦察载荷改进过程
1 “全球鹰”无人机载光电成像侦察设备
“全球鹰”无人机载光电侦察设备包括红外、可见光和激光类设备。由于大部分设备采用全被动的工作方式,本身不辐射电磁波,因此,在执行侦察任务时不容易被敌方发现。光电侦察设备与侦察雷达相比,最大的优点是在受到干扰时,仍能维持正常工作,除此之外,光电侦察设备体积小、功耗低等优点,也都是雷达设备不具有的。
1.1可见光侦察设备
“全球鹰”安装的可见光电视摄像机是由柯达公司生产,采用1 024×1 024像素的CCD图像传感器,工作波段为0.5 um~1 um,主要特点是体积小、重量轻、灵敏度高、抗冲击振动和寿命长。它不仅用于监视、侦察而且可以辅助操纵员遥控驾驶,但它的缺点是只能在白天进行工作。
1.2红外侦察设备
由雷神公司生产的“全球鹰”具有无人机载红外侦察设备,通过谱段的扩展揭露伪装,弥补了可见光侦察不足。其主要种类包括红外行扫仪、红外前视仪、成像光谱仪和红外成像仪等。“全球鹰”无人机载红外成像仪采用3 um~5 um锑化铟凝视红外焦平面阵列,像元尺寸为20 um,能够发现伪装的目标,观测到目标的运动状态,同时它的精确度极高,空间分辨力小于0.1 m,温度灵敏度可达0.02℃[3]。表1给出了可见光和红外传感器的性能比较。
2 “全球鹰”无人机的雷达成像侦察设备
2.1SAR雷达
由休斯公司通信系统分公司生产的SAR雷达是全天时、全天候工作的,精确度较高,主要用于对固定目标成像。它既能发现飞机、船舶等金属目标,又可以侦察到植被、伪装等非金属物体,清晰地反应出它们所在地的地质结构。SAR雷达上安装的传感器,在聚束模式条件下分辨力为0.3 m,在广域条件下为1m,成像范围最大可以达到200 km2[3]。X波段SAR采用机械扫描天线和行波管发射机,因为没有低截获概率措施,所以发射的信号极易被敌方捕获到。表2给出了SAR和EO、IR的性能比较。

表1 EO和IR性能比较

表2 SAR和EO、IR性能比较
2.2MP-RTIP雷达
MTI(Moving Target Indicator)是仅显示所需要的动目标的脉冲雷达,在工作中主要用来对运动目标进行连续地跟踪[3]。诺斯罗普·格鲁门公司研发的MP-RTIP作为一种多平台技术雷达,具有合成孔径雷达和MTI两种功能,这使得“全球鹰”既可以对作战目标进行连续监视侦察,又可以通过机载动目标指示躲避巡航导弹的袭击。天线尺寸为0.45 m× 1.5 m的MP-RTIP雷达使用有源电扫阵列,通过180°机械旋转覆盖飞机的两侧弦,在方位和俯仰上实现了宽角度完全照射,确保了“全球鹰”支持空空和空地两种工作模式。而且电子扫描与传统的机械扫描相比,在精度和速度上都有很大提高。MP-RTIP雷达也同样具有聚束模式,在此模式下可获得小范围高分辨率的图像,并且还可以对目标实施有效的电子干扰。
3 “全球鹰”无人机成像侦察载荷能力分析与仿真
本仿真采用美国AGI公司开发的STK工具箱,该工具箱用来支持航天、防御和情报任务。STK可视化效果好,通过三维可视化模块建立的场景,逼近真实战场环境。STK拥有用于数据计算的分析引擎,可以快捷地分析出陆、海、空、天任务,并产生详细的模拟战场数据报告。STK软件应用领域不断扩展,涵盖遥感、通信等多个领域[4],美国独立测评机构aerospace公司出具的测评报告证明,STK软件仿真分析结果置信度达99.5%。
3.1仿真设置
假定“全球鹰”无人机对朝鲜开城市遂行成像侦察任务,已知开城市的面积为179.263 km2。要求“全球鹰”侦察高度为18 km,对目标区域的侦察平均覆盖比率达到90%。
①根据仿真需要在STK对象浏览器(Object Browser)中创建场景QQY,设置仿真时间:17 May 2014 09:12:00.000(UTCG)—17 May 2014 10:00: 00.00(UTCG)。
②向场景中添加韩国某机场及朝鲜开城市地图,经纬度范围如表3所示,分别作为出发地和侦察区域。

表3 机场及开城市经纬度信息
③添加飞行器,命名为“Global_Hawk”,在属性-三维图形属性-模型中选择“rq-4a”模型,在属性-基础-路径中规划出“全球鹰”的飞行路径,航迹点如表4所示。

表4 “Global_Hawk”侦察航迹点
(4)为“Global_Hawk”添加3种传感器,分别命名为“EO”、“IR”、“SAR”;向场景中添加面目标“AreaTarget”和覆盖定义对象“CovDef”;为开城市添加地面站“Facility”(Lat:38.158°,Lon:126.551°)和发射机“Transmitter”。
“全球鹰”无人机侦察航迹俯视图如图2所示;设置完成的仿真场景3D图形如图3所示。
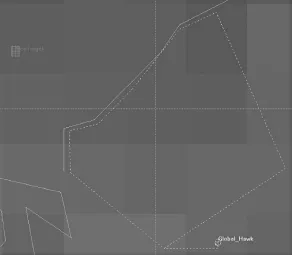
图2 侦察航迹俯视图
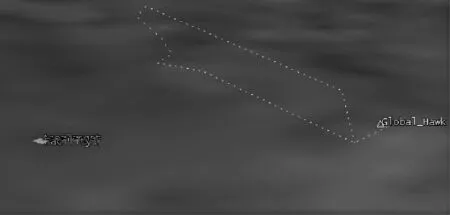
图3 侦察场景3D图
3.2仿真结果与分析
SAR传感器对开城市的覆盖能力报告如表5所示:

表5 SAR覆盖能力报告
从报告中可以看出,侦察起止时间为9:19: 05.000—9:24:29.5000,在09:19:05.000时刻第一次覆盖比率达到100%,在09:23:56.125时刻覆盖比率最小为0%,侦察时间段内平均覆盖比率为85.71%,小于要求的平均覆盖比率90%,因此,采用实验中所设航线SAR不能满足侦察要求。
IR、EO传感器对开城市的覆盖能力报告如表6、表7所示:
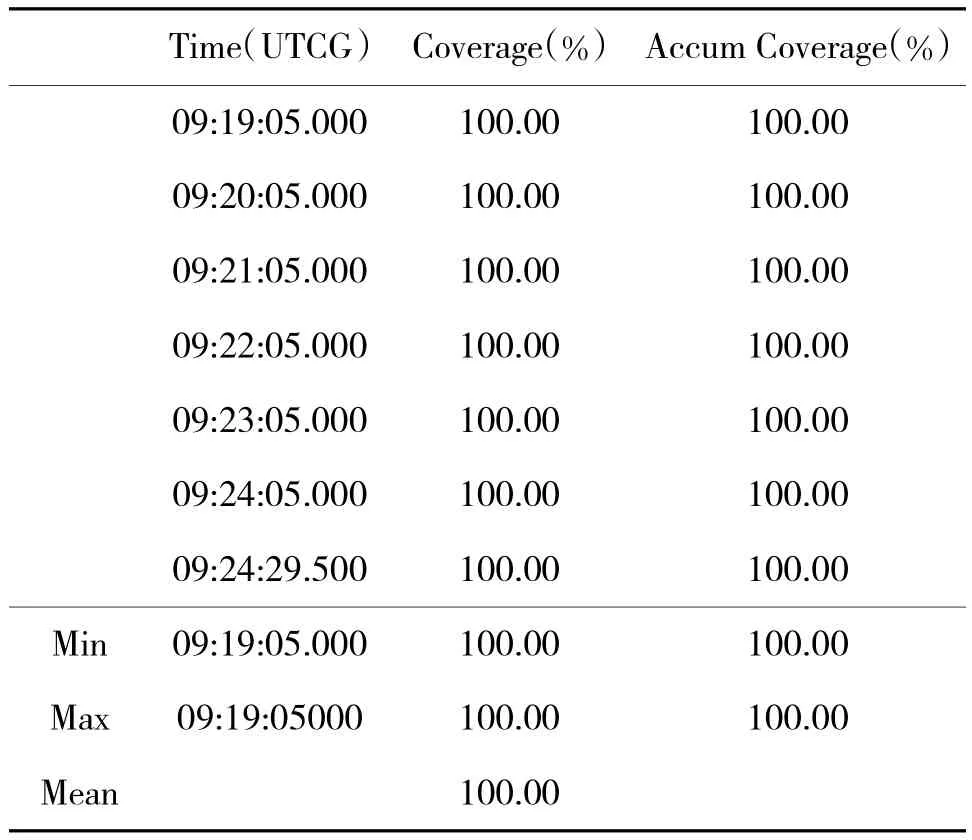
表6 IR覆盖能力报告
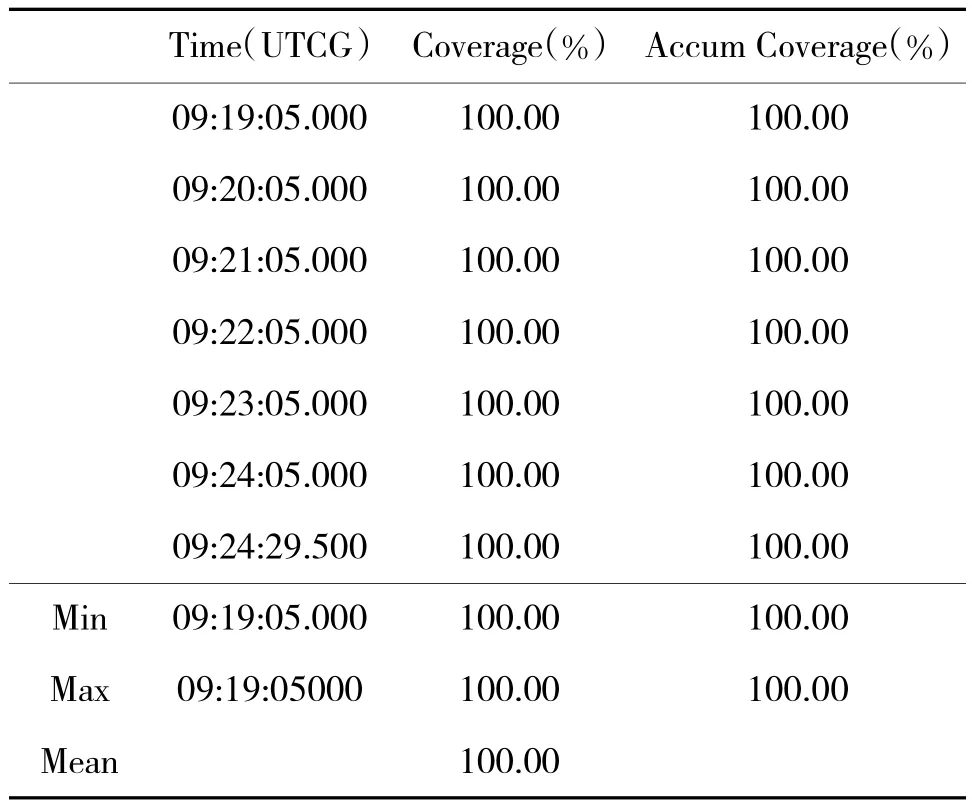
表7 EO覆盖能力报告
从报告中可以看出,在对开城市进行侦察的时间段内,“全球鹰”无人机载IR、EO的平均覆盖比率均为100%,大于要求的90%,所以IR、EO满足对目标区域的侦察要求。
本次侦察设计的航线,IR、EO能按照预定计划完成任务,而对于SAR,若想提高它的平均覆盖比率,应该对航线进行重新规划。实际作战中,天气条件是影响侦察效果的主要因素,在雨天或沙尘暴等恶劣天气中,IR、EO成像质量差,而SAR不易受天气影响,虽然SAR的平均覆盖比率相对IR、EO低,但为了获得准确、清晰的情报信息,还是尽量使用SAR进行侦察。
在覆盖比率满足要求的前提下,再测量发射机与“全球鹰”之间的距离,生成的图表如图4所示。
按照NIIRS准则,传感器-目标之间距离越近,传感器成像效果越好,NIIRS值则越高。从图表中可以看出,在侦察时间段内,发射机与“全球鹰”之间的距离最小,所以此次规划保证了“全球鹰”在侦察过程中传感器是处于成像最佳的工作状态。
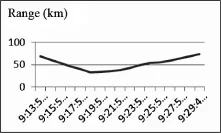
图4 发射机与“全球鹰”距离变化图像
4 结束语
“全球鹰”无人机有“大气侦察卫星“之称,凭借其先进的侦察设备,实现了在18 km高空对特定区域的平均覆盖比率达到100%。在航迹规划合适的条件下,侦察时间段内可以使传感器与目标之间的距离达到最小,提高了NIIRS值。
本文目前只针对一架“全球鹰”无人机侦察能力进行仿真,下一步可在此基础上对多架“全球鹰”协同侦察效能进行仿真,建立的场景将更加逼近实际战场环境,获得的数据也将更加全面、准确。
[1]刘长清,刘承禹.机载远程对地监视系统关键技术研究[J].电子信息对抗技术,2011,26(5):33-36.
[2]林岳峥,祝利,王海.全球鹰无人侦察机的技术特点与应用趋势[J].飞航导弹,2011(9):21-24.
[3]季华益.“全球鹰”及其对抗策略思考[J].航天电子对抗,2013,29(1):26-30.
[4]杨颖,王琦.STK在计算机仿真中的应用[M].北京:国防工业出版社,2005.
[5]林伟廷.高空长航时无人机侦察任务规划问题研究[D].长沙:国防科学技术大学,2007.
[6]徐毅,罗君.无人机——未来战场的主力武器[J].电子科学技术评论,2005,20(5):1-6.
[7]周义.全球鹰无人侦察机——大气层侦察卫星[J].中国航天,2003,23(9):40-43.
[8]Putrich G.Next Generation of Global Hawks Ready to Roll[J/OL].Flight nternational,2010-01-06.
[9]军事射频技术频道:全球鹰无人侦察机的介绍[J].射频世界,2010(6):35.
[10]乔明,赵晓林,余超.面向任务的无人侦察机航线规划算法研究[J].空军工程大学学报;自然科学版,2015,16(2):20-25.
Analysis and Simulation of Imaging Reconnaissance Equipment Capacity of Global Hawk UAV Based on STK
LIU Shi-yi1,HAO Shun-yi1,ZHAO Xiao-lin1,2,LIU Hua-wei1,Sun Li-guo3
(1.School of Aeronautics and Astronautics Engineering,Air Force Engineering University,Xi'an 710038,China;
2.Key Laboratory of Science and Technology on Avionics Integration Technologies,Shanghai 200233,China;
3.95899 Troops of PLA,Beijing 100085,China)
This article analyzes and simulates the imaging reconnaissance equipment capacity of Global Hawk UAV.Firstly,the development of reconnaissance equipment is summarized.Then,the reconnaissance equipment including EO,IR,SAR and MP-RTIP are introduced.Finally,the simulation situation is established with STK.Because of visualization simulation design,it is summarized that the average coverage ratio of fixed area is different with various sensor.Simulation results show that the reconnaissance route can affect effect of sensor.So suitable sensor should be elected in battle based on the battlefield situation.
Global Hawk,imaging reconnaissance,STK
V271.4
A
1002-0640(2015)08-0023-04
2014-06-16
2014-07-17
国家自然科学基金(61132007);陕西省基础研究项目(2014JQ8331);航空科学基金资助项目(20145596024)
刘世一(1990-),男,辽宁铁岭人,硕士研究生。研究方向:导航、制导与控制。