201.5MHz中子照相用RFQ加速器低电平控制系统的设计
2015-11-26于天君陆元荣
于天君 陆元荣
201.5MHz中子照相用RFQ加速器低电平控制系统的设计
于天君 陆元荣
(北京大学重离子物理研究所 北京 100871)
北京大学自主研制了基于射频四极(Radio Frequency Quadrupole, RFQ)强流氘束加速器。为满足该加速器稳定运行的要求,设计了一套低电平控制系统,系统主要包含自动增益控制(Automatic Gain Control, AGC)和自动频率控制(Automatic Frequency Control, AFC)两种方式,可实现对腔体频率、进腔功率的自动控制和手动控制。为保证安全、稳定运行,对SWR (Standing Wave Ratio)、限位信号进行监测,通过RS232协议和LabVIEW界面实现HMI (Human Machine Interface),亦可实现与PLC (Programmable Logic Controller)的无缝对接。连续闭环运行表明,控制系统对场幅度和相位的控制精度能够达到±1%和±1°之内,证明该低电平控制系统达到了RFQ加速器对各路功率和腔体频率稳定控制的要求。
RFQ加速器,低电平控制系统
北京大学中子照相系统已经在北京大学建造和调试完成,该系统采用热中子照相的技术,利用强流氘束射频四极(Radio Frequency Quadrupole, RFQ)加速器将氘束加速到一定能量,打靶产生中子并进行成像,它主要包含:电子回旋共振离子源(Electron Cyclotron Resonance Ion Source)、低能束流传输段(Low Energy Beam Transport)、四杆型RFQ加速器(RodRadio Frequency Quadrupole Accelerator)、高能束流传输段(High Energy Beam Transport)和靶站(Target)等主要部分[1−2]。另外,还需控制系统实现对其参数的监测、诊断、分析和自动控制。该照相系统中最主要部分为RFQ加速器,该加速器全长为2.8m,工作频率201.5MHz,重复频率100Hz,占空比不大于10%并可调节,峰值流强50mA,入口能量50keV,出口能量2MeV[3]。该加速器的低电平控制系统要求对加速场幅度及相位精度分别控制在±1.5%和±1.5°内,实现对其输入功率和腔体频率的自动控制,并实现与上位机用户界面系统的通信。
1 RFQ加速器低电平控制系统的控制原理
为实现对束流的既定加速和调制的目标,RFQ加速器频率必须工作在201.5MHz,其极间电压为70kV。工作频率和极间电压稳定,才能良好地发挥加速器的性能。然而随着运行时间的增长,加速器内部的温度会出现波动,可能会导致腔体频率偏移,不能有效地发挥加速器的性能[4−5]。因此,设置自动频率控制(Automatic Frequency Control, AFC)回路和自动增益控制(Automatic Gain Control, AGC)回路是十分必要的。控制回路必须能够实时对腔体的频率以及各路功率信号进行监测,当腔体失谐或功率波动的时候能够及时做出反应。作为控制芯片的一种,单片机可靠性和环境适应性强,对外界变化反应较快。基于以上,选择C8051F12X单片机作为整个低电平控制系统的芯片,以实现对频率和增益的有效控制。
强流氘束RFQ加速器低电平控制系统如图1所示,该系统主要由RFQ加速器、C8051F12X系列单片机(C8051F12XMCU)、射频功率源(RF Power Source)、定向耦合器(Directional Coupler)、相位及幅度检测器(Phase & RF Detector)、步进电机控制盒(Stepper Motor Controller)、LabVIEW计算机显示及控制面板(LabVIEW Control Panel)、射频功率耦合器(Coupler)、步进电机调谐器(Stepper Motor)、腔体信号提取端(Pick Up)等几个主要部分组成。虽然在硬件上他们之间的相互协调组成整个控制系统,但根据功能又可分为AFC和AGC两个不同功能子系统,下面对这两个子系统分别进行介绍。

图1 强流氘束RFQ加速器低电平控制系统的设计图
1.1 AFC回路
随加速器的运行,加速器的频率会随温度而变化,这也是RFQ加速器噪声(Microphonics)主要来源,为稳定加速器的工作频率和减小噪声,设置AFC回路是十分必要的[6]。该回路为反馈型回路,至少需一路信号作为反馈信号,反映腔体失谐情况,进而做出相应调节。腔内频率的变化会导致腔体提取信号幅度和相位的变化,原则上,提取端口信号的幅度和相位信号均可反映腔体频率的变化。但是,幅度信号只能反映失谐信息,而相位信号既可给出腔体的失谐信息又可给出频率偏移的方向(如图2所示),故选择相位信号作为反馈信号。

图2 RFQ加速腔S21参数的相频曲线
如图3 AGC与AFC控制回路原理图所示,定向耦合器前进功率提取端(Forward Pickup)提取到的信号经过衰减器衰减之后进行延迟,与经过衰减之后腔体功率提取端(Cavity Pickup)提取到的腔体信号之间进行鉴相操作,鉴相后的相位信号即可作为反馈信号。

图3 AGC与AFC控制回路的原理图
单片机根据相位信号给出调谐信号指令并发送给步进电机控制盒,驱动步进电机带动调谐杆进行调谐操作。调谐杆直径40mm,步进距离40mm,腔体内的调节范围为70–110mm。该调谐杆对腔体的磁场部分进行微扰,在不改变极间电压分布、腔体比分路阻抗、值等物理量的前提下进行调谐操作。图4为冷模测试条件下测得腔体频率增长与4根调谐杆运动距离之间的变化关系,由图4可知,频率增长与调谐杆距离之间存在正比例变化关系,通过改变距离而改变频率是可行的。
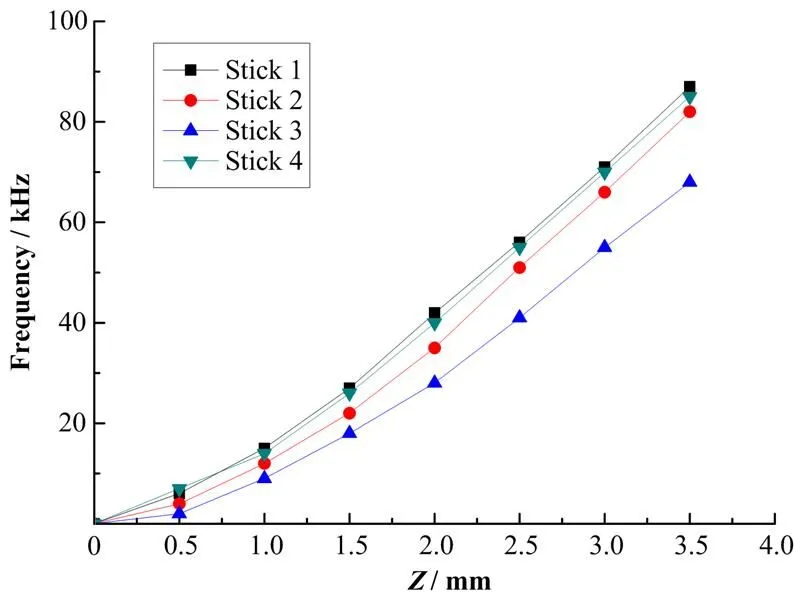
图4 腔体频率增长随调谐杆距离的变化曲线
1.2 AGC回路
自动增益控制是指腔体提取端的信号,经衰减器衰减和隔离器之后,到达射频功率检波器AD8361,该检波器将检测到的功率信号转化为电压信号,然后将该信号传送给微处理器C8051F121,该处理器将模拟信号转化为数字信号并发送给C8051F120,通过与用户设定值比较,控制功率源的功率输出,使腔体内的场强稳定在设定值。
1.3 控制板硬件说明
(1) 三路提取信号进行了衰减和隔离,其中前进信号、反射信号和提取信号的衰减量分别为−66.7dB、−65dB和−50dB,到达AD8361之前三路取样信号应不大于25dBm。
(2) 三路都采用AD8361作为检波器,用来检测功率值的大小。采用AD8302作为鉴相器和AD8368作为增益控制器。
(3) 采用4片C8051F121微处理器作为相位和幅值信号预处理器,一片C8051F121微处理器作为4路步进电机的控制器。
(4) 采用C8051F120作为主芯片,实现以下操作:与其他处理器实现通信,与上位系统实现通信,对所有的数字量进行处理,控制步进电机调谐器的动作,控制增益信号。
1.4 程序逻辑结构
程序可以实现频率开、闭环控制和幅度开、闭环控制,其主要部分执行框图如图5,图中MGC (Manual Gain Control)为手动增益控制、MFC (Manual Frequency Control)为手动频率控制。执行幅度闭环操作时,需要设置幅值信息(程序内部设置了保护值,输入幅值应在此范围内),使腔内场强达到设定值。执行幅度开环时亦设置了保护值,当输入值超出保护范围时会将幅值输入警报标志位置1。在执行AFC操作时为防止电机运动超出调谐范围,程序设置了限位,该内容将在下部分展开。

图5 程序主要部分的执行框图
2 RFQ加速器低电平控制系统HMI界面
调试界面如图6所示,可实现操作系统的可视化和人机交互功能。界面的写入部分能够实现幅度和频率的开、闭环操作,实现对单个调谐杆的控制,读取部分可以读取腔体功率、前进功率、反射功率、各个电机位置、当前的报警状态和限位状态。将低电平控制系统部分集成到人机界面程序的整个系统控制模块中去,可以实现对整个系统的控制(图7)。

图6 控制系统的LabVIEW调试界面

图7 人机界面程序的整个RFQ加速器系统控制界面
3 保护机制的设计
由§2讨论可知,对于AGC操作而言,在程序中设置了保护范围,使加速器可以运行在一个安全的范围内。
为使前进波有效地进入腔内建立电磁场,同时减小反射波的幅值,以保护功率源,要对驻波比进行监测。驻波比与入射功率和反射功率的定义为[7]:
式中,r和f分别是反射功率和入射功率;SWR(Standing Wave Ratio)是驻波比系数。由式(1)可知,驻波比越大其反射率就越大,当驻波比超过预定值时系统给出报警信号。
在AFC操作时需要实时地调整步进电机位置,但是,其运动范围须在70–110mm才能保证系统安全,故而需要设置限位信号。AFC操作限位保护装置如图8所示,24V直流电源(24 V DC)、继电器线圈端(Coil)、限位开关(Limit Switch)串联在电路中。当处于正常运行时,限位开关常闭,继电器线圈处于吸合状态,微控制单元(Microcontroller Unit, MCU) 限位信号处于0电位,系统调谐正常。当调谐杆触发限位开关时,限位开关断开,继电器线圈处于非吸合状态,MCU接收到高阻态,系统警报且处于限位状态。

图8 AFC操作限位保护装置示意图
4 程序中待定系数的确定
在此以前进功率与MCU数字信号之间的转化系数确定为例,说明反射功率、腔内提取信号等待定系数处理方式与此相同。
如图9所示,功率源(RF Power Source)前进功率f,经定向耦合器(Directional Coupler)、衰减器(Attenuator)后,在示波器(Oscilloscope)上显示峰峰值为P,结合前进信号衰减系数为66.7dB,可知:

式中,R为同轴线特征阻抗。
如图10所示,f经定向耦合器、衰减器(衰减后信号应不大于25dBm)和处理器后,在屏幕上显示数字量为Dig。

图10 MCU电路板测量前进功率流程图
MCU将功率信号转化为数字量的过程为:根据电功率与电压、电阻的关系,将功率转化为电压有效值,然后将检测到电压有效值进行模拟量到数字量(Analog to Digital)转化,该转化为线性转化,设其转化系数为。由以上过程可得f与Dig的关系为:

由以上分析,前进功率f可由式(2)给出,数字量Dig可以调用程序指令直接屏幕读出,将f与Dig代入式(3),即可确定系数2的值。将106.67/2作为整体系数,最后将系数输入到MCU的程序,前进功率系数确定完毕。
5 测试结果
该RFQ加速器低电平控制系统在北京大学强流氘束RFQ加速器上进行功率测试实验,图11和图12分别为在AGC和AFC两种模式下48h内幅度波形随时间的变化曲线以及相位波形随时间的变化曲线。从图11可知,闭环后控制系统对场幅度和相位的控制精度能够达到±1%和±1°之内,完全满足之前的设计要求。

图11 AGC控制的幅度(a)和相位波形
6 结语
根据强流氘束RFQ加速器功率控制、噪声抑制和运行安全的要求设计了RFQ加速器低电平控制系统。在48h连续运行中,该系统对加速腔内场幅度和相位控制精度分别为±1%和±1°,达到了设计指标,满足了强流氘束RFQ加速器安全、稳定运行的要求,为其它RFQ加速器慢调谐系统的设计提供了思路。
1 Zou Y, Wen W, Guo Z,. PKUNIFTY: a neutron imaging facility based on an RFQ accelerator[J]. Nuclear Instruments and Methods in Physics Research, 2011, A651(1): 62–66. DOI: 10.1016/j.nima.2011.02.011
2 Wen W, Li H, Zou Y,. Neutronic design and simulated performance of Peking University Neutron Imaging Facility (PKUNIFTY)[J]. Nuclear Instruments and Methods in Physics Research Section, 2011, A651(1): 67–72. DOI: 10.1016/j.nima.2010.12.194
3 周泉丰. 强流氘束RFQ加速器控制与实验研究[D]. 北京: 北京大学, 2012ZHOU Quanfeng. Experimental studies on high current deuteron RFQ and control system for PKUNIFTY[D]. Beijing: Peking University, 2012
4 Kondo Y, Morishita T, Hasegawa K,. High-power test and thermal characteristics of a new radio-frequency quadrupole cavity for the Japan proton accelerator research complex Linac[J]. Physical Review Special Topics-Accelerators and Beams, 2013, 16(4): 040102. DOI: 10.1103/PhysRevSTAB.16.040102
5 Wang J, Huang J L, He Y. Multi-physics analysis of the RFQ for Injector Scheme II of C-ADS driver Linac[J]. Chinese Physics C, 2014, 38(10): 107005. DOI:10.1088/1674-1137/38/10/107005
6 Xia W L, Wang Z, Lu Y R,. Design and implementation of a compact control system for coupled RFQ-SFRFQ Linac[J]. IEEE Transactions on Nuclear Science, 2014, 61(4): 2345–2350 DOI: 10.1109/ TNS.2014.2329876
7 Pozar D M. Microwave engineering[M]. Hoboken, NJ: John Wiley & Sons Inc., 2005
Design of a low level control system for the RFQ accelerator of PKUNIFTY
YU Tianjun LU Yuanrong
(,,,)
Background: The Peking University Neutron Imaging Facility (PKUNIFTY) was developed by using neutron sources generated by Radio Frequency Quadrupole (RFQ) accelerators. Purpose: This study aims to design a low level control system that meet the requirement of stable operation of the RFQ accelerator. Methods: Both the automatic gain control (AGC) and automatic frequency control (AFC) were designed to control the cavity frequency. The power fed into cavity by automatic and manual ways. In order to make it safe and stable, the standing wave ratio (SWR) and limit signal were constantly monitored. The human machine interface (HMI) was implemented in the remote computer using LabVIEW, it communicates with both the control system’ microcontroller unit (MCU) and the Programmable Logic Controller (PLC)RS232 interface. Results: The control precision of the accelerating field is ±1% in amplitude and ±1° in phase in a 48-h closed loop test. Conclusion: Test results show that the low level control system meet the requirements for stable control of the power and cavity frequency of RFQ accelerator.
RFQ accelerator, Low level control system
TL50
TL50
10.11889/j.0253-3219.2015.hjs.38.080204
于天君,女,1990年出生,2015年于北京大学获硕士学位,研究领域为RFQ加速器低电平控制
陆元荣,E-mail: yrlu@pku.edu.cn
2014-12-22,
2015-03-09