入射角和距离对点云精度综合影响的评定
2015-11-22凌胜仁刘云龙
吴 栋,凌胜仁,刘云龙
(苏州工业园区测绘地理信息有限公司,江苏 苏州 215027)
1 引言
三维激光扫描技术是近几年来国际上兴起的一种新型测量技术,是测绘领域的又一次技术革新。通过三维激光扫描仪能快速获取被摄物体表面的点云数据,提取三维坐标,具有快捷、实时、高精度、低成本、无接触、易操作等特点[1],在三维重建等领域广泛应用。同时,国内外许多学者都对三维激光扫描仪的测量精度进行了研究,郑德华等指出了测距误差和扫描角误差是三维激光扫描误差的主要误差源之一[2];Derek D.Lichti 利用室内标定场和自标定方式对三维激光扫描仪进行了误差分析[3];刘春等提高了三维激光扫描仪的测距精度和测水平角精度[4];谢宏全等通过建立室外检校场来检验徕卡C10 的测距精度与水平角精度[1],[5]。
本文通过室外标定场,依据实际工程环境,设计合理有效的入射角和距离对精度影响的检定试验。试验时,采用Z+F IMAGER 5006h 三维激光扫描仪获得试验数据,将三维激光扫描仪的扫描结果与经加常数和乘常数改正的全站仪测量结果进行比较,研究不同入射角与距离对三维激光扫描仪测量精度的综合影响。试验结合隧道三维激光测绘案例,为城市地下工程三维扫描方案和扫描作业提供了技术参考。
2 标定场设计与数据获取
2.1 试验器材
本文采用的三维激光扫描仪为德国Z+F 的IMAGER 5006 h,主要技术参数如表1 所示[6]。
2.2 试验方案设计
本文在室外标定场对仪器精度进行评定。图1为所采用的室外标定场。

表1 Z+F IMAGER 5006h 主要技术参数

图1 室外标定场
采用全站仪无棱镜多次精测方式测出所有靶标的中心坐标,全站仪事先经过检校测得其加常数与乘常数,并对测量结果进行改正,确保结果可作为检定三维激光扫描精度的标准。为有效分析扫描仪的水平角精度和距离对精度的影响,本文在垂直于1 号标靶且距离为5 m,10 m,20 m,30 m 和40 m 处分别设站进行点云扫描,并在室外标定场设置4 个靶球,用于不同设站之间点云的配准。
2.3 数据获取
根据上节所示的试验方案以指定的流程完成试验,在试验过程中做好过程控制。主要试验步骤如下:①按照设计方案布设试验场地;②用全站仪配合棱镜建立局部坐标系,在局部坐标系中多次精测每一靶标的中心坐标,用三维激光扫描仪依次在各个扫描站完成扫描作业;③将全站仪靶标数据和扫描仪扫描数据导出;④获取点云数据后,采用与三维激光扫描仪配套的点云处理软件Z+F Laser Control 进行不同设站点云的配准以及靶标中心坐标的提取。在处理时可将点云影像放大,并采用自动识别靶标中心的方式得出靶标中心坐标,确保坐标提取的精确性与高效性。
3 数据分析
在试验场上按照前节所述的实验方案布设平面靶标和靶球,使用全站仪(Topcon 7502C)实测平面标靶,得到靶标中心的坐标。将各扫描站得到的三维点云通过4 个靶球转换到全站仪所在的坐标系下。分别在各站扫描点云中使用随机自带软件Z+F Laser-Control 提取各个靶标的中心坐标,如表2 所示。

表2 各扫描站点云提取的靶标中心坐标误差
综合分析表1 可知,各个扫描站在在P1—P5 靶标都表现较类似的精度,在P6 之后的靶标表现较大的误差,即在P5 点之后发生了跳变,精度锐减。分析原因,针对试验三维扫描仪的扫描情况,随着距离的拉长,精度变化明显,达到一定距离后,点位精度差别明显。
为更加直观的分析扫描仪入射角、距离和靶标中心的测量精度的关系,将数据以折线图的形式表示出来,如图2 所示。
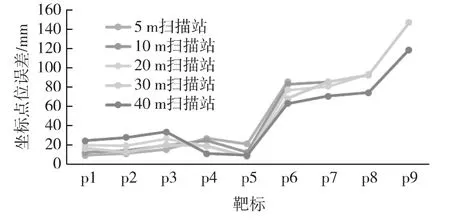
图2 各扫描站点云提取的各靶标中心点位误差

图3 入射角度对精度的影响
由图3、图4 可知,扫描仪测量误差随入射角和距离的增大,开始表现平稳,但到达一个阈值之后误差急剧增加。各个扫描站的扫描误差增大的起始角度数值不同,随着扫描距离的的增大,该起始角度数值越来越小。在垂直入射角时,扫描仪测量误差随距离的增大而增大。
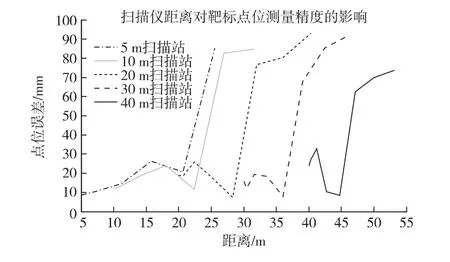
图4 距离对精度的影响
4 在地下工程测绘中的指导作用
,根据入射角与距离对点云精度的综合影响的分析可知,在大型工程中应用三维激光扫描技术时距离零入射角距离20 m(P5 点)之后测量误差急剧增大。因此,本文提出在正常的湿度环境下若使用Z+F IMAGER 5006h 的superhigh 模式进行多站扫描两测站的距离不宜大于40 m,如图5 所示。

图5 适宜湿度条件下地下工程三维激光多站扫描方案
为了验证上述结论,试验证明在站距小于35 m的情况下隧道点云数据拼接最大误差为12.6 mm时能达到较好的拼接效果。当站距大于35 m 情况下拼接误差较大,为56.7 mm。导致点云拼接误差特别大的原因是地下隧道雾气重、入射角度大而导致有效点云数减少,拼接数不足,精度变化大,无法达到自带软件的拼接精度要求。
5 结束语
本文通过建立室外标定场,以Z +F 公司生产的IMAGER 5006h 为试验对象,研究入射角与距离对三维激光扫描仪测量精度的综合影响,并结合隧道三维激光测绘案例分析,为城市地下工程测绘时扫描方案和三维扫描作业提供技术参考。试验表明,扫描仪测量误差随距离和角度的增大,开始表现平稳,但是到一定阈值后,扫描仪点位测量误差急剧增加。根据这个特点提出,在设计IMAGER 5006 h 三维激光扫描仪多站扫描方案时,(在适宜的湿度环境下)站距不宜大于40 m。但地下工程实例表明:当湿度增大和水汽严重的情况下,由于水汽对激光的散射作用,应该在根据工程需求又保证精度的条件下,适当减小站距。因此,为保证测量精度,提高作业效率,在施工作业时,应视外界环境变化适当调整站间距。
由于湿度环境难以模拟,本文未对湿度和三维激光扫描仪的测量误差进行研究,后续将对湿度和测量精度的关系作进一步的研究。
[1]谢宏全,高祥伟,徐孝伟.地面三维激光扫描仪水平角精度检校试验研究[J].测绘通报,2014,(8):52-54.
[2]郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(2):32-34.
[3]Lichti D D.Error modelling,calibration and analysis of an AM-CW terrestrial laser scanner system[J].Isprs Journal of Photogrammetry & Remote Sensing,2007,61(5):307-324.
[4]刘春,张蕴灵,吴杭彬.地面三维激光扫描仪的检校与精度评估[J].工程勘察,2009,(11):56-60.
[5]谢宏全,高祥伟,邵洋.地面三维激光扫描仪测距精度检校试验研究[J].测绘通报,2013,(12):25-27.
[6]Z+F,Gmbh.Z +F IMAGER 5006h User Munual[Z].Germany:Z+F Gmbh,2013.
[7]张洪栋,刘翔,时振伟,等.影响地面三维激光扫描仪数据质量的因素分析[J].测绘与空间地理信息,2014,(2):183-186.
[8]张永彬,高祥伟,谢宏全,等.地面三维激光扫描仪距离测量精度试验研究[J].测绘通报,2014,(12):16-19.
