机载激光通信稳瞄吊舱设计与跟踪精度测试
2015-11-21孟立新赵丁选张立中姜会林李小明
孟立新,赵丁选,张立中,姜会林,李小明
(1.吉林大学机械科学与工程学院,吉林长春130012;2.长春理工大学空地激光通信国防重点学科实验室,吉林长春130022)
机载激光通信稳瞄吊舱设计与跟踪精度测试
孟立新1,2,赵丁选1,张立中2,姜会林2,李小明2
(1.吉林大学机械科学与工程学院,吉林长春130012;2.长春理工大学空地激光通信国防重点学科实验室,吉林长春130022)
针对飞机姿态扰动和强烈震动条件下激光通信中的光轴稳定问题,研制了粗精复合跟踪机构,并对减振器安装结构形式进行了分析,完成了减振系统设计和伺服系统仿真。在此基础上开展了飞机姿态和振动特性测试,根据测试结果,绘制了振动试验曲线。进行室内仿真检测和外场飞行测试的试验结果表明,在大气信道条件下,粗跟踪吊舱跟踪精度优于23.97 μrad,精跟踪精度优于7.03 μrad.对比实验室和外场测试环境的差异,可知大气干扰引起的光斑闪烁是导致跟踪精度下降的主要原因,为系统指标分配和吊舱跟瞄精度的提高提供了参考。
仪器仪表技术;激光通信;机载稳瞄吊舱;跟踪精度测试;飞行试验
0 引言
机载激光通信具有通信速率高、保密性好、机动灵活等优点[1],备受各国重视。从美国国防部规划的未来战斗系统示意图[2](见图1)和美国的国防先进研究署(DARPA)规划的地-空-天激光通信链路与组网示意图[3](见图2)可以看出,机载激光通信链路是空地激光通信链路的重要通信节点,也是星地激光通信链路重要的中继节点,还是地面间激光通信链路中重要的中继通信节点,因此研究机载激光通信技术具有重要意义。
由于飞机飞行姿态变化快、振动强烈,相对于地面静止激光通信载体和卫星,跟瞄机构需要更高的跟踪速度和更好的抗干扰能力[4-5]。
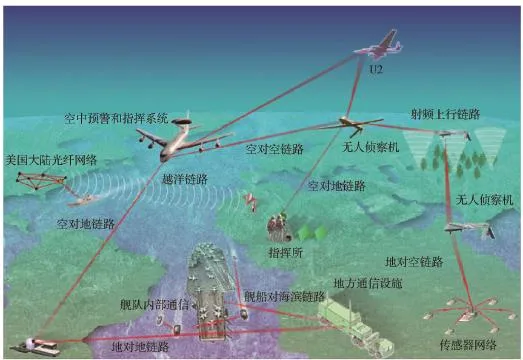
图1 美国国防部规划的未来战斗系统示意图Fig.1 Shematic diagram offuture fighting system
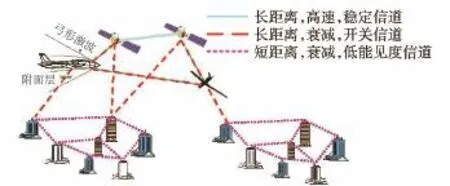
图2 DARPA规划的空间光通信网络分布图Fig.2 Free space optical networks of DARPA
1 机载激光通信跟瞄系统设计
对于飞机间远距离激光通信,为实现通信距离大于100 km,考虑激光光斑的覆盖范围和相对运动速度,通信光束散角设计为200 μrad,要实现突发误码概率小于10-8,根据误码率与跟踪精度关系[6],跟瞄系统跟踪精度应优于10 μrad.
1.1 跟瞄系统设计
高精度跟瞄机构通常采用二级稳定方式,即粗精复合方式实现[1]。粗跟踪的目标是实现大范围跟瞄,抑制飞机扰动,为精跟踪提供初级工作环境,将目标运动稳定在精跟踪视场内。精跟踪对粗跟踪抑制残差进行进一步的抑制,实现高精度跟踪。
粗跟踪稳瞄吊舱采用两轴四框架结构,如图3所示。该结构形式有利于伺服精度的提高,且具有较大的保精度运动范围。
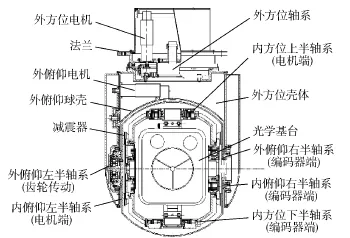
图3 机载吊舱结构图Fig.3 The structure design of airborne pod
两轴四框架吊舱安装在飞机上,飞机的运动和振动经过外框架后传递到内框架,最终影响激光通信光轴的指向精度[7]。虽然采用内外环跟踪方式可对载体的运动进行补偿,但由于伺服带宽限制,许多高频振动是无法完全补偿的,此时需考虑被动减振措施。减振器具有隔离高频振动的作用,但对频率低于其固有频率的振动无法抑制,其作用相当于低通滤波器。因此,将减震器与主动伺服控制结合既可实现对高频振动抑制,又可实现对低频姿态变化的补偿,从而实现视轴高精度稳定和跟踪。
1.2 减振器解耦与减振效果分析
减振器的安装方式有两种:一种是整体减振方式,另一种是局部减振方式[8]。整体减振是降减振器均匀安装在载体与吊舱安装基础面之间,如图4所示。
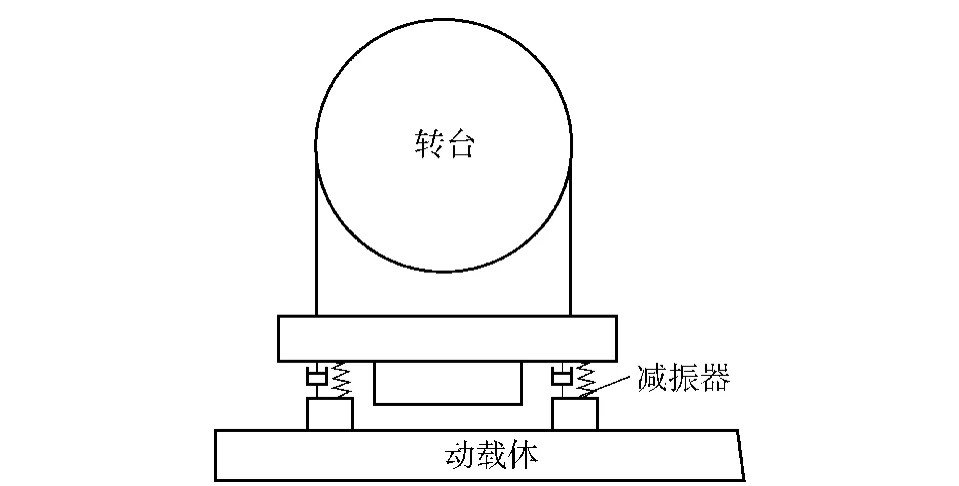
图4 整体减振示意图Fig.4 Schematic diagram of whole vibration reduction
这种安装方式为平面布置方式,具有结构简单,操作灵活、容易实现,减振效果较好等优点。整体减振由于将被减振对象安装在减振器平面上,使得被减震中心离减振器平面较远,当基础受到较大激励时,载体振动强烈,容易摇摆而产生失稳。同时当吊舱俯仰轴大范围快速运动时易于减振器产生耦合,使对框架运动的控制变得复杂,降低系统整体的精度。
局部减振方式,是在内外环之间增加减振器,为避免内环框架重心与减振器的弹心不重合问题,将减振器安装在内环框架的两侧,减振器布置如图5所示。
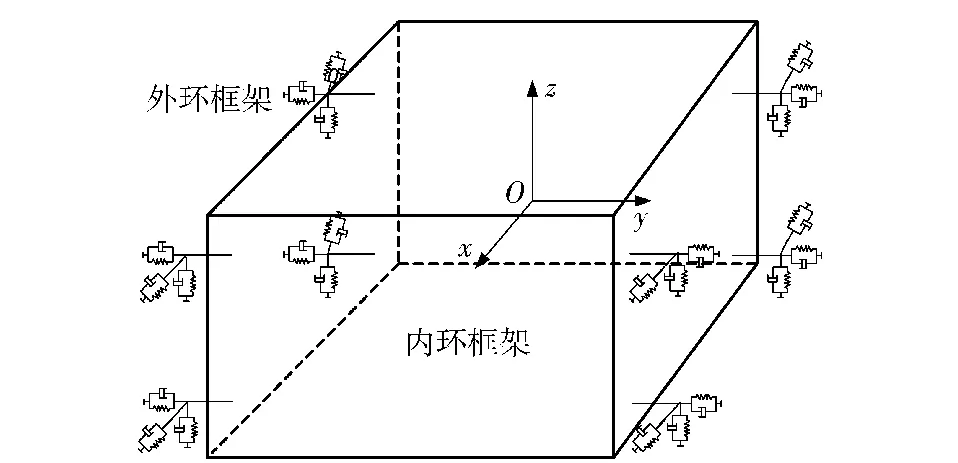
图5 局部减振示意图Fig.5 Schematic diagram of local vibration reduction
将8个3向刚度减振器对称分布在内环框架的两侧,每侧4个。对于减振器,内环框架可视为刚体,设其质量为m(忽略减振器质量),在内环框架的质心建立坐标系Oxyz,其中,x轴为光轴方向,y轴为外俯仰轴方向,z轴满足右手系。则内环框架质心坐标为(0,0,0),各轴惯性矩为Ix、Iy、Iz,惯性积表示为0,8个减振器在坐标系内的坐标分别为(xi,yi,zi),沿坐标轴方向的刚度分别为(kxi,kyi,kzi),阻尼为(cxi,cyi,czi),i=1,2,…,8.
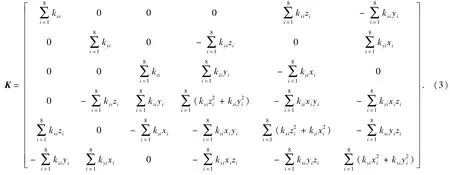
根据系统弹性力学方程[9]

式中:M、C、K分别为质量阵、刚度阵和阻尼阵;F为基础激励;X=[xyzθxθyθz]T为内框架绝对位移;
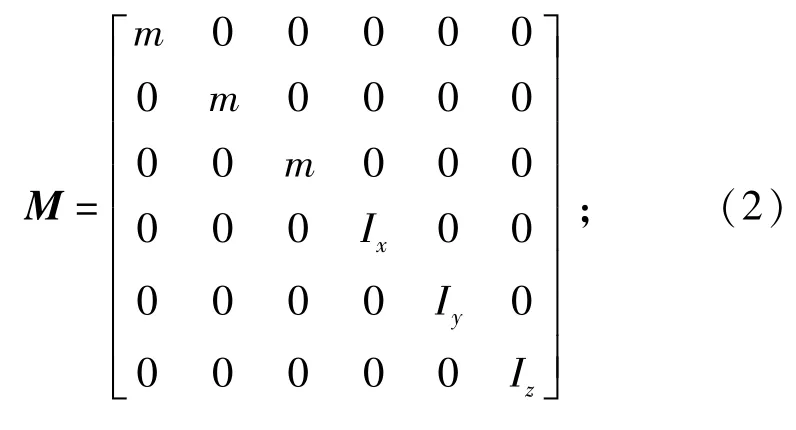
阻尼器与弹簧并联,阻尼矩阵C与刚度矩阵K结构形式相同,也为对称阵。
从质量阵、刚度阵和阻尼阵的结构形式上可以看出,当内框架的质心与8个减振器安装对称面的中点重合时,即减振器支点相对质心对称分布时,,,实现6个自由度完全解耦。
此时,减振器对振动源激励振幅衰减系数为
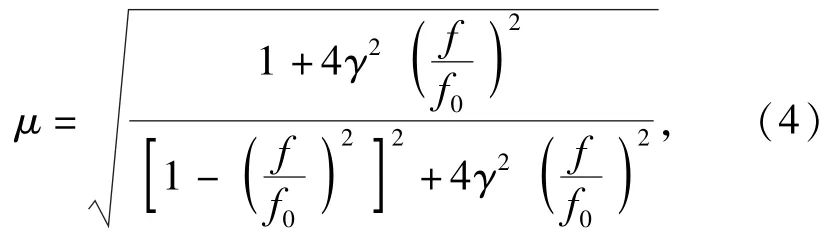

式中:k为减振器动刚度;m0为减振器额定承载质量。在机载激光通信粗跟踪吊舱中,减振器选择3向等刚度减振器,型号为JPD-2-2.0.减振器动刚度为10.6 kg/cm,额定承载质量为2.0 kg,额定承载质量下的谐振频率为11.5 Hz,阻尼比为0.12.
由于采用8只减振器并联结构形式,系统的额定总承载质量为16 kg,总刚度84.8 kg/cm,由于机械系统的刚度远大于减振器的刚度,内框架质量约为15 kg,因此引起的系统谐振频率改变不大,系统谐振频率约为11.8 Hz.图6为振动增益随频率变化关系。

图6 振动增益随频率变化关系Fig.6 Vibration reduction rate vs.frequency
从图6中可以看出,减振器在低频会对振动有放大作用,在10 Hz处,振动放大最大为输入幅值的1.6倍。对于振动源的激励在20~100 Hz的振动,振幅衰减系数μ为0.63~0.08,可以看出该减振器可以很好地隔离高频振动。
1.3 伺服系统设计与仿真
粗跟踪伺服系统采用直流力矩电机直接驱动,角度传感器采用32极对数的双通道旋转变压器。控制系统采用电流环、速度环和位置环3环控制策略,系统控制框图如图7所示,根据仿真分析(见图8),系统跟踪精度为±50 μrad优于精跟踪视场的1/4(精跟踪视场为320 μrad),从而实现粗精对接。
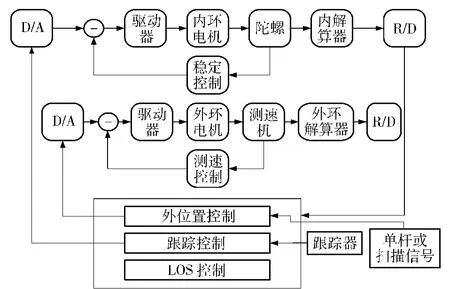
图7 粗跟踪控制系统框图Fig.7 Block diagram of coarse tracking control system
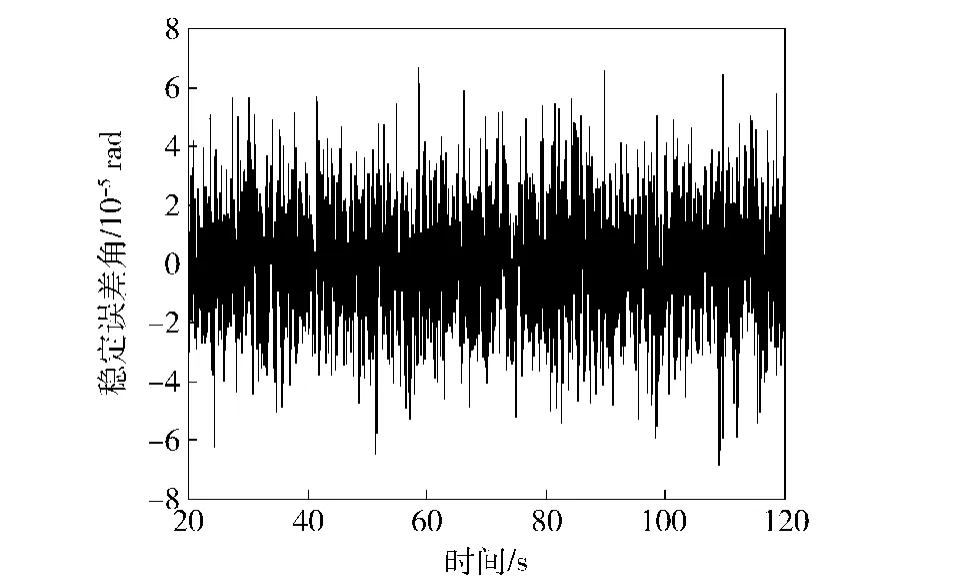
图8 粗跟踪系统精度仿真结果Fig.8 The accuracy simulation result of coarse tracking system
精跟踪控制采用美国PI公司的压电陶瓷振镜驱动,其带载频率为1 000 Hz,反馈元件采用高帧频相机,并对相机进行开窗口设计,窗口像素80×80,采样频率2 000 Hz,实现带宽为300 Hz的跟踪回路,抑制粗跟踪残差。
2 飞机运动特性测量
2.1 设备布局与安装位置
试验飞机采用某型号固定翼飞机,巡航速度250 km/h,最大飞行高度6 000 m,光端机采用座椅安装槽固定于飞机内部。通信窗口采用飞机原有窗口改装,最大限度减小飞机改装程度。光端机安装与窗口改装如图9和图10所示。

图9 光端机布局图Fig.9 Layout of optical transmitter and receiver

图10 窗口设计与改装图Fig.10 Design and modification of window
2.2 飞机运动特性测量
对飞机低频姿态变化,采用惯性导航系统(INS)对飞机姿态变化进行测试,对飞机的高频振动,采用振动测试仪进行测量。巡航时,飞机姿态变化测试结果如图11所示。
从图11中可以看出,飞机最大横滚角速度为5°/s,最大偏航角速度为6°/s,要求跟瞄吊舱具备较高的执行速度。振动测试结果如图12所示。
从图12中可以看出:试验用飞机振动主振动点为90 Hz左右,振动频率范围从10 Hz一直延伸到1 000 Hz左右;振动最大加速度为x方向3.8 m/s2(飞行方向),y方向最大值为5.7 m/s2(窗口视轴方向),z方向最大值为5.7 m/s2(上下方向),飞机整体振动较为强烈。

图11 飞机姿态变化测试图Fig.11 The test chart of airplane attitude
3 跟踪精度室内检测
首先在室内搭建跟踪精度检测系统(见图13),采用大口径平行光管模拟无穷远目标,采用振动台模拟飞机的振动特性,振动量值根据飞机实测值和GJB150—86确定,振动输入曲线如图14所示,随机振动频率5~2 000 Hz,考虑螺旋桨飞机固有频率,增加100 Hz定频振动。
采用机载激光通信系统的脱靶量评价系统的跟踪精度[10],粗跟踪一个相元对应的空间分辨率为15 μrad,精跟踪相机一个相元对应的空间分辨率为4 μrad,对精跟踪脱靶量进行40倍细分,最终精跟踪相机测量分辨率为0.1 μrad.图15为粗跟踪视轴振动抑制残差和粗精复合后视轴振动抑制残差仿真结果。只开启粗跟踪时,视轴振动抑制残差为17.3 μrad(1σ),粗跟踪与精跟踪均开启后,视轴振动抑制残差为0.78 μrad(1σ),满足激光通信视轴指向精度要求。
4 飞行试验结果与讨论
两架飞机相对飞行,相互跟踪,在两架飞机相距20 km时,测得的机载激光通信样机跟踪精度如图16、图17所示。
从图17可知:粗跟踪误差(1σ)为方位16.19 μrad,俯仰17.68 μrad;精跟踪误差(1σ)为方位5.5 μrad,俯仰4.4 μrad.两轴误差合成后,合成后粗跟踪误差为23.97(1σ),合成后精跟踪误差为7.03 μrad<10 μrad,满足通信对跟瞄精度的要求。
在运动特性基本相同的条件下,飞行试验得到的稳瞄吊舱跟踪精度大于实验室内仿真系统测试结果,其主要原因是飞行试验中,激光通过了大气层。由于大气湍流和附面层效应影响,使得到达接收端的光束波前相位发生畸变,低频变化造成光斑中心产生光漂移现象,高频变化产生光斑扩散现象,对于较强湍流条件,甚至产生光斑破碎和光斑空洞现象,降低光学天线与探测器耦合效率,对小靶面探测器影响更加明显,从而影响跟踪精度[11-13]。光经过大气前后接收端光斑形状如图18所示。
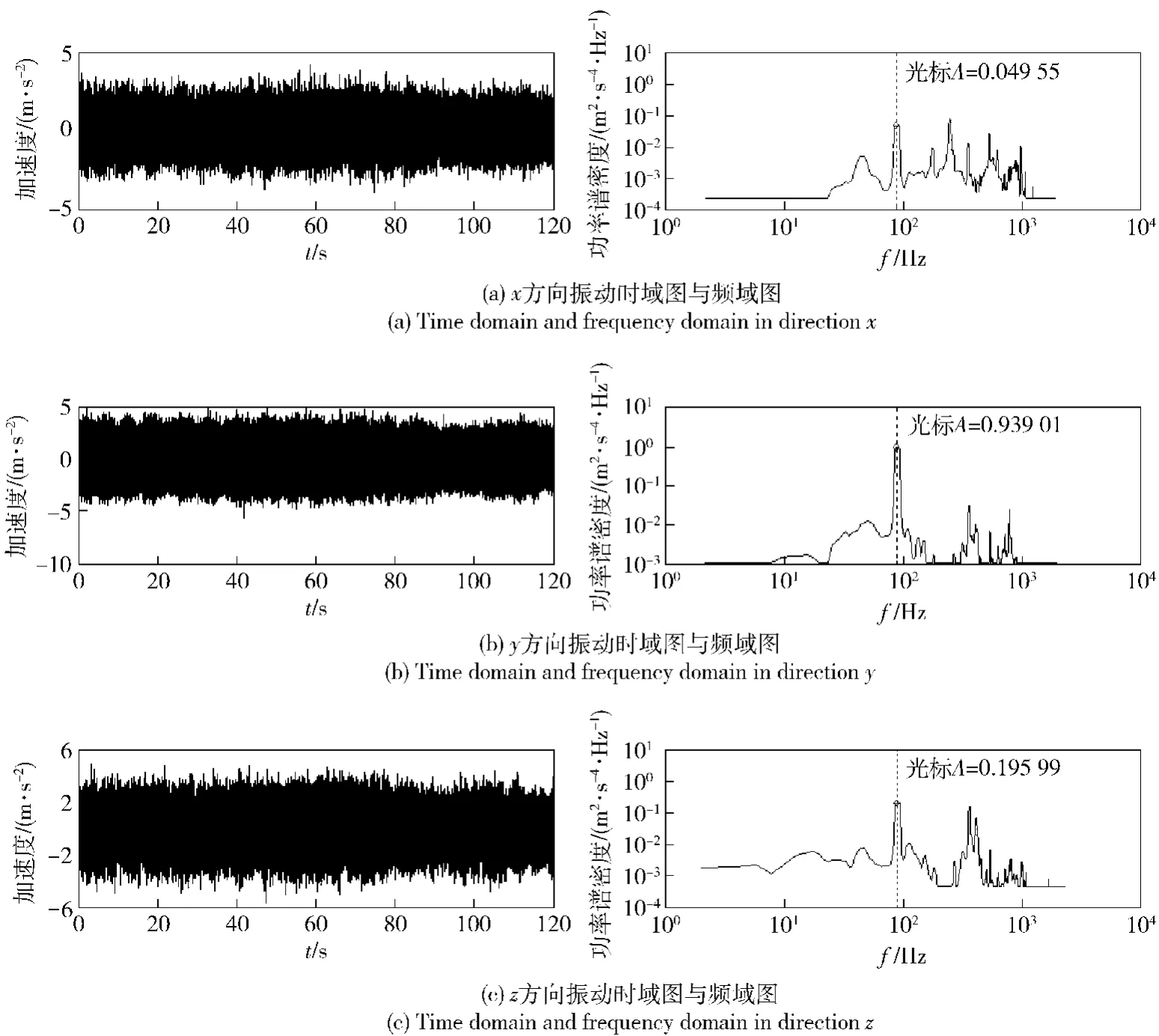
图12 飞机振动情况测试结果Fig.12 The test result of airplane vibration

图13 跟踪精度检测试验Fig.13 The test of tracking accuracy
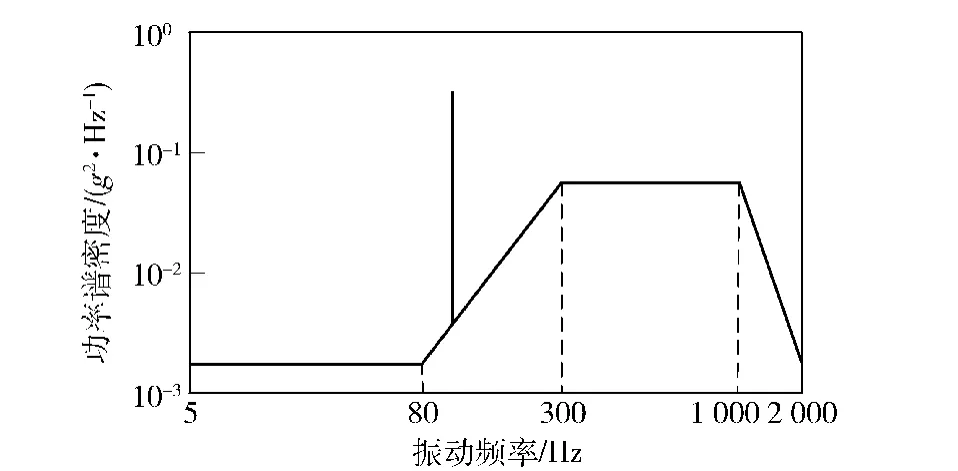
图14 振动台输入曲线图Fig.14 Vibration curve of vibration table

图15 振动抑制效果图Fig.15 Effect diagram of vibration suppression
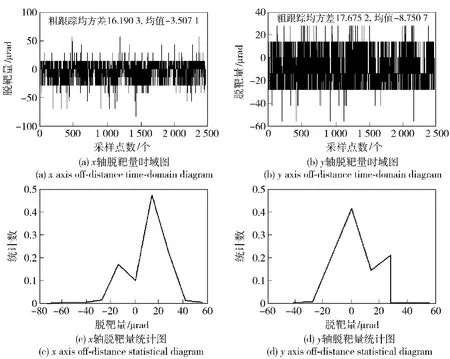
图16 粗跟踪吊舱跟踪精度实测图Fig.16 The tracking accuracy testing chart of coarse tracking system
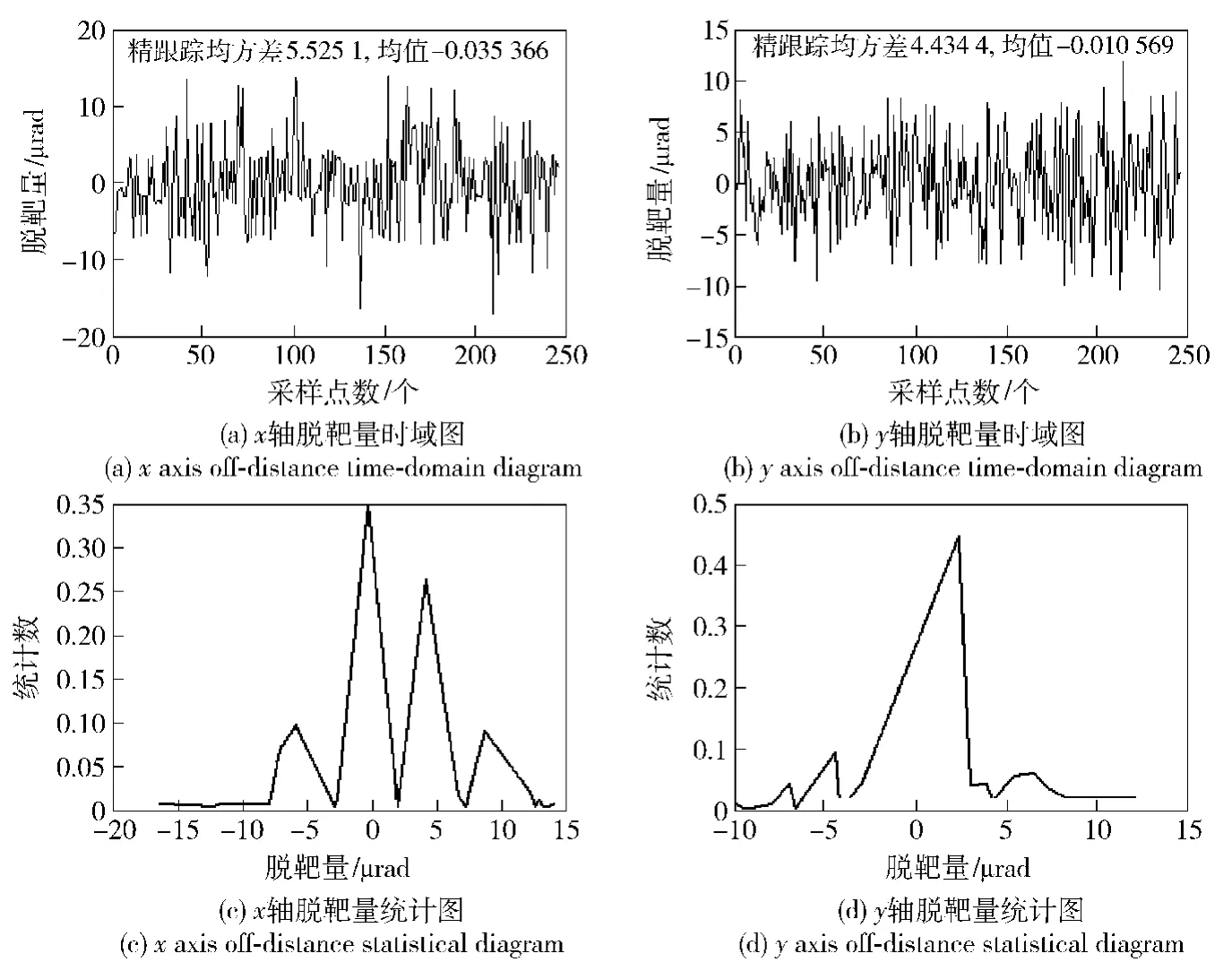
图17 精跟踪系统跟踪精度实测图Fig.17 The tracking accuracy testing chart of fine tracking system
室内仿真实验通常只考虑运动和振动对跟瞄精度的影响,对大气等因素模拟较困难,导致室内仿真结果较实际飞行试验结果还是有较大差距,在跟踪指标设计过程中需要预留足够的安全预量。
5 结论
通过对飞机姿态变化和振动测量分析可知,飞机的姿态变化和振动均较强烈。系统采用粗精复合跟踪方式,通过优化设计被动减振器和伺服系统带宽,实现粗跟踪精度优于23.97 μrad,精跟踪精度优于7.03 μrad,满足激光通信对视轴指向精度的要求,为实现高速率、远距离激光通信提供了支撑。

图18 大气湍流引起的散斑效应Fig.18 Speckle effect due to atmospheric turbulence
(
)
[1] 姜会林,佟首峰,张立中,等.空间激光通信技术与系统[M].北京,国防工业出版社,2010. JIANG Hui-lin,TONG Shou-feng,ZHANG Li-zhong,et al.The technologies and system of space laser communication[M].Beijing:National Defense Industry Press,2010.(in Chinese)
[2] Ruggiero T.Laser zaps communication bottleneck.science and technology[EB/OL].Lawrence Livermore National Laboratory,[2003-12-01].https:∥www.llnl.gov/str/December02/Ruggiero.html.
[3] Chan V.Free space optical networks[EB/OL].[2007-11-20]. https:∥web.mit.edu/chan/www/vincent_project.html.
[4] 姜会林,刘志刚,佟首峰,等.机载激光通信环境适应性及关键技术分析[J].红外与激光工程,2007,36(6):299-302. JIANG Hui-lin,LIU Zhi-gang,TONG Shou-feng,et al.Analysis for the environmental adaptation and key technologies of airborne laser communication system[J].Infrared and Laser Engineering,2007,36(6):209-302.(in Chinese)
[5] Toyoda M.Acquisition and tracking control of satellite-borne laser communication systems and simulation of downlink fluctuation[J]. Optical Engineering,2006,45(3):4-12.
[6] 马晶,潘锋,谭立英.星地激光链路中光束发散角与跟瞄误差的最佳匹配[J].强激光与粒子束,2006,18(8):1233-1237. MA Jing,PAN Feng,TAN Li-ying.Optimum ratio of beam divergence angle to pointing error for satellite-ground laser link[J]. High Power Laser and Particle Beams,2006,18(8):1233-1237.(in Chinese)
[7] Horwath J,Fuchs C.Aircraft to ground unidirectional lasercomm.terminal for high resolution sensors[J].Proceedings of SPIE,2009,7199(1):101-113.
[8] 孟立新,张立中,李小明,等.直升机载高压电力巡线用稳定吊舱设计[J].电力系统自动化,2012.36(21):113-116. MENG Li-xin,ZHANG Li-zhong,LI Xiao-ming,et al.A helicopter-borne stable pod for high voltage electricity-line-cruising[J]. Automation of Electric Power System,2012,36(.21):113-116.(in Chinese)
[9] 方同,薛璞.振动理论与应用[M].西安:西北工业大学出版社,2000. FANG Tong,XUE Pu.Vibration theory and application[M].Xi' an:Northwestern Polytechnical University Press,2000.(in Chinese)
[10] Zhang L Z,Meng L X,Xu R,et al.Research of the tracking accuracy and stabilization accuracy test on airborne platform[C]∥Proceeedings of IEEE ICMA 2009.Changchun,Jilin,China:IEEE,2009:3201-3206.
[11] 韩成,白宝兴,杨华民,等.空地激光通信跟踪精度主要外界影响因素研究[J].光子学报,2010,39(1):89-94. HAN Cheng,BAI Bao-xing,YANG Hua-min,et al.The main external influence factor on air-ground laser link[J].Acta Photonica Sinica,2010,39(1):89-94.(in Chinese)
[12] Biswas A,Kovalik J,Regehr M W,et al.Malcolm wright.emulating an optical planetary access link with an aircraft[C]∥Free-Space Laser Communication Technologies XXII.San Francisco,California,US:SPIE,2010.
[13] Fletcher T M,Cunningham J,Baber D,et al.Observations of atmospheric effects for FALCON laser communication system flight test[C]∥Atmospheric Propagation VIII.Orlando,FL,US:SPIE,2011.
The Test of Tracking Accuracy and Design of Airborne Laser Communication Stabilized Pod
MENG Li-xin1,2,ZHAO Ding-xuan1,ZHANG Li-zhong2,JIANG Hui-lin2,LI Xiao-ming2
(1.School of Mechanical Engineering,Jilin University,Changchun 130012,Jilin,China;2.Fundamental Science on Space-Ground Laser Communication Technology Laboratory,Changchun University of Science and Technology,Changchun 130022,Jilin,China)
For the optical axis stability problem of airborne laser communication,a coarse and fine tracking system is proposed.The installation structure of the shock absorber is analyzed.Avibration reduction system is designed,and the servo system is simulated.On this basis,the vibration and movement characteristics of the aircraft are measured.The measured results meet the laboratory simulation input.The simulation tests and the field tests of tracking accuracy are carried out.The reults show that,under the condition of atmospheric channel,the tracking accuracy of coarse tracking system is better than 23.97 μrad,and the tracking accuracy of fine tracking system is better than 7.03 μrad.The results are greater than the laboratory simulation test results,which provide a reference for the system index allocation and the improvement of pod accuracy.
apparatus and intruments technology;laser communication;airborne stabilized pod;tracking accuracy test;flight test
TN209
A
1000-1093(2015)10-1916-08
10.3969/j.issn.1000-1093.2015.10.013
2014-11-18
国家“863”计划项目(2012AA0042)
孟立新(1981—),男,博士研究生。E-mail:mengcust@163.com;赵丁选(1965—),男,教授,博士生导师。E-mail:zhaodx@jlu.edu.cn
