基于定量反馈理论的火炮随动系统鲁棒控制研究
2015-02-28荀盼盼韩崇伟赵宇和王保华
荀盼盼,韩崇伟,赵宇和,王保华
(西北机电工程研究所,陕西咸阳712099)
0 引言
火炮随动系统技术是指根据给定的射击诸元完成火炮自动瞄准的伺服技术,主要用于提高火炮自动化程度,实现火炮快速、高精度瞄准。但由于受战场环境约束、冲击、振动、传动摩擦、弹性形变等各种因素的影响,火炮的随动控制系统存在多种干扰与误差,直接影响火炮的射击精度[1-3]。
在现代火炮随动系统控制中通常采用非线性PID、平方根、前馈补偿、滑模变结构以及自适应、模糊、神经网络等控制策略[4-6],这些方法要么依赖于系统的线性模型,要么设计过程繁琐,且计算量较大。火炮随动系统是一个复杂的非线性系统,很难获得精确的数学模型,极大程度地影响着系统的控制效果。而计算量较大的方法又不利于工程应用,且大多停留在理论研究阶段。
定量反馈理论(QFT)[7]是Issac Horowitz 提出的一种鲁棒控制设计理论,这种设计理论可以用于对象具有很大不确定性的单变量、多变量、各种高度非线性以及时变等系统的鲁棒设计。QFT 是一种针对具有高度不确定性反馈控制系统的工程设计理论,是用作图的方法把设计指标和系统的不确定性用定量的方法在Nichols 图上形成边界,然后基于这些边界设计满足要求的控制器(包括前置滤波器)[8]。
本文提出了一种基于QFT 的火炮随动系统鲁棒控制策略,利用回路整形法设计控制器,既能改善系统性能,增强其鲁棒性,又利于工程实现。
1 火炮随动系统模型
火炮随动系统主要由控制器、功率放大器、永磁同步电机、减速器等环节组成,根据负载的力矩平衡方程建立电机-被控对象模型[9-10]如(1)式所示:
式中:ω 为电机输出角速度(rad/s);θ0为火炮随动系统输出角度;θm为电机输出角度(rad),θm=i·θ0;i 为减速比;J 为负载折算到电机轴上的转动惯量(kg·m2);B 为电机轴上的阻尼系数(N·m·s);Te为电磁转矩(N·m);TL为包含非线性扰动的负载转矩(N·m).
假设:永磁材料的电导率为0,忽略磁路饱和、磁滞损耗,三相绕组为对称、均匀分布,绕组中的感应电动势为正弦波形式,忽略高次谐波。则永磁同步交流电机(PMSM)在两相旋转坐标系d/q 下的数学模型[11]如下:
电压方程

磁链方程

转矩方程

(2)式~(4)式中:ud、uq分别为d、q 轴电压(V);id、iq分别为d、q 轴电流(A);ψd、ψq、ψf分别为d、q 轴磁链及永磁体磁链(Wb);Ld、Lq为d、q 轴电感(H);Rs为定子相电阻(Ω);np为电机极对数;ωr为转子电角速度(rad/s),ωr=npω.
在实际作战过程中,由于装弹量的变化使得负载转动惯量以及负载力矩在一定范围内不断发生变化,且存在机械及电气参数变化,因此火炮随动系统是一个带有参数不确定性及外扰动的非线性系统。首先不考虑外扰动,根据自动控制理论,将(1)式~(4)式通过合理简化,建立系统不确定被控对象模型。

式中:k 和a 为火炮随动系统不确定参数。
2 火炮随动系统QFT 控制器设计
2.1 QFT 系统结构
QFT 是基于频率域Nichols 图的一种鲁棒控制系统设计理论,能实现具有大范围不确定性系统的稳定控制,不需要知道对象的具体模型[12]。基于QFT 二自由度控制系统基本结构如图1所示。

图1 QFT 控制系统结构图Fig.1 QFT control system
图1中:r 和y 分别为系统的输入和输出;d1和d2分别为外部输入干扰和输出干扰;G(s)和F(s)分别为所需设计的控制器和前置滤波器;P(s)为不确定被控对象。QFT 的最终目标是设计控制器G(s)和前置滤波器F(s),使得闭环系统即使存在对象不确定及存在输入输出扰动作用下,其频域响应仍能满足性能指标要求。
2.2 不确定对象模板
以某火炮随动系统为例,代入已知参数,求得系统不确定参数范围为:k∈[3 500,4 000],a∈[25,40]. 选取系统标称对象模型为

根据某火炮随动系统的频率特性,选择一组具有代表性的频率特征点,表征对象模板的最大范围,ω∈[0.86,2,4.2,14.6,25,100,500]rad/s. 结合方程(6)式得系统Nichols 图上形成的不确定对象响应模板,如图2所示。

图2 火炮随动系统不确定对象模板Fig.2 Uncertain plant templates of gun servo system
2.3 设计性能指标
根据该火炮随动系统的动态特性要求,闭环系统阶跃响应的调节时间ts≤2.5 s,超调量σ≤20%,相角裕度γ =45°,幅值裕度4.7 dB. 由此确定设计性能指标如下:
1)鲁棒稳定性指标

式中:L(s)=P(s)G(s). 此时,相角裕度45.2°,幅值裕度4.95 dB.
2)输出干扰阶跃响应性能,取时间t≥1 s 时,输出响应幅值满足|y(t)|≤0.02,则系统输出干扰模型为

3)跟踪性能指标

由火炮闭环系统阶跃响应时域指标得期望的跟踪上下界模型Tu(s)、Tl(s)分别为

2.4 QFT 控制器设计
图3给出了在无控制器作用下标称对象的开环频率响应及复合边界交集。图中圆圈从上到下分别代表ω=[0.86,2,4.2,14.6,25,100,500]rad/s 的被控对象标称点,图3中曲线1 ~曲线7 从上到下分别代表ω=[0.86,2,4.2,14.6,25,100,500]rad/s 所对应的边界曲线。

图3 复合边界及整形前开环Nichols 图Fig.3 Compound bounds and open loop Nichols chart before loop shaping
借助于QFT 交互式设计环境,按照控制曲线的设计原则,在Nichols 图上对系统开环频率响应曲线进行整形,如图4所示。由图4可知,开环频率特性曲线没有穿越稳定边界,且各个频率特征点均在边界线上方,满足系统鲁棒稳定性要求。

图4 整形后系统开环Nichols 图Fig.4 Open loop Nichols chart after loop shaping
此时控制器表达式为

依据QFT 的设计原理[7]可知,控制器G(s)的设计主要是为了满足系统鲁棒稳定性需求,无法保证系统一定会具有较高的动态品质。通过分析系统闭环频率特性发现,仅有控制器作用下的响应曲线不在期望的上下界范围内,必需设计前置滤波器对系统进行补偿控制,以提高系统品质。同样在Nichols 图上利用回路整形原理,求得前置滤波器表达式为

为了考察控制器G(s)和前置滤波器F(s)的可行性,图5给出了QFT 交互式设计环境分析得出的稳定裕度验证曲线、跟踪性能验证曲线、抵抗输出干扰验证曲线。

图5 控制器性能分析曲线Fig.5 Analytic curves of controller performance
图5中,虚线为设计边界,实线为实际系统曲线。由图5可知,实际输出曲线均在边界范围内,即本文所设计的控制器G(s)和前置滤波器F(s)满足设计指标要求。
3 仿真研究
为了进一步验证本文所设计的控制器G(s)和前置滤波器F(s)的有效性,对火炮随动系统进行时域仿真分析。
图6为QFT 作用下系统阶跃响应和期望的上下界跟踪响应对比曲线,从图6中可以看出,系统实际输出在设计期望的边界范围内,满足调节时间和超调等时域指标要求。

图6 阶跃响应验证曲线Fig.6 Step response test curves
图7给出了在不同工况下,不同控制算法的阶跃响应对比曲线。从图7(a)可以看出,在无参数摄动且无输出干扰的情况下,QFT 控制策略较PID 复合控制相比,优势不太大,响应略快,调节时间稍短。从图7(b)和图7(c)可以看出,在具有相同参数摄动以及相同外扰动的情况下,和PID 复合控制相比,QFT 控制策略表现出明显的优越性,系统输出平稳,几乎不受参数摄动及扰动的影响。
图8给出了相同参数变化、相同扰动作用下,不同频率不同控制算法系统的正弦响应对比曲线。通过对比图8(a)和图8(b)可以看出,当给定信号在较小频率范围内,QFT 控制器作用下系统正弦响应性能变化不大,控制效果良好,而PID 复合控制在存在参数摄动及扰动作用下跟踪性能较差。从图8(c)可以看出,当给定信号频率增大到一定程度时,系统的跟踪性能明显变差,表明已不在QFT 控制范围内。由此可见,本文所设计的控制器不但具有较强的鲁棒性,而且在系统要求的频率范围内跟踪性能良好。
4 结论
由于火炮随动系统中不可避免地存在模型参数不确定性以及各种非线性扰动,影响了系统控制效果,本文提出了一种基于定量反馈理论的火炮随动系统鲁棒控制策略。以某火炮随动系统为例,进行了QFT 控制器设计,并通过仿真研究验证了本文所设计的控制器能够满足系统性能指标要求,具有较强的鲁棒性和较好的跟踪精度。从QFT 控制器设计过程可以看出,该方法易于掌握,只需掌握经典控制理论就可以完成设计工作。因此,文中所提出的基于定量反馈理论的鲁棒控制策略具有较强的工程实用性,为火炮随动系统的设计提供了新的思路。

图7 系统阶跃响应对比曲线Fig.7 Contrast curves of system step response
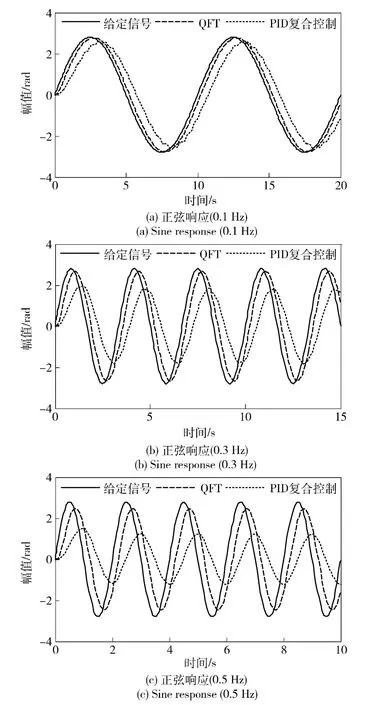
图8 系统正弦响应对比曲线Fig.8 Contrast curves of system sine response
References)
[1]陈杰,方浩,辛斌,等. 数字化陆用武器系统中的建模、优化与控制[J].自动化学报,2013,39(7):943 -962.CHEN Jie,FANG Hao,XIN Bin,et al. Modeling,optimization and control in ground-based digital weapon systems[J]. Acta Automatica Sinica,2013,39(7):943 -962. (in Chinese)
[2]黄大荣,姜辉. 弹炮结合防空武器系统的机动生存能力研究[J].兵工学报,2010,31(7):882 -886.HUANG Da-rong,JIANG Hui. Research on mobile survivability of integrated missile-gun air defense system[J]. Acta Armamentarii,2010,31(7):882 -886. (in Chinese)
[3]Nordin M,Gutman P O. Controlling mechanical systems with backlash-a survey[J]. Automatica,2002,38:1633 -1649.
[4]郭亚军,王晓锋,马大为,等. 自适应反演滑模控制在火箭炮交流伺服系统中的应用[J].兵工学报,2011,32(4):493-497.GUO Ya-jun,WANG Xiao-feng,MA Da-wei,et al. Application of adaptive backstepping sliding mode control in alternative current servo system of rocket gun [J]. Acta Armamentarii,2011,32(4):493 -497. (in Chinese)
[5]田建辉,钱林方.火力线跟踪与瞄准综合自适应控制研究[J].计算机仿真,2011,28(3):40 -43.TIAN Jian-hui,QIAN Lin-fang. Self-adapting tracking and pointing control of axis of firepower on unmanned turret[J]. Computer Simulation,2011,28(3):40 -43. (in Chinese)
[6]张文静,台宪青. 基于LuGre 模型的火炮伺服系统摩擦力矩自适应补偿[J]. 清华大学学报:自然科学版,2007,47(S2):1756 -1760.ZHANG Wen-jing,TAI Xian-qing. Adaptive friction compensation in gun servo systems based on the LuGre model[J]. Jounal Tsinghua University :Science & Technology,2007,47(S2):1756 -1760. (in Chinese)
[7]Horowitz I C. Sorvey of quantitative feedback theory[J]. International Journal of Control,1991,53(2):255 -291.
[8]王增会,陈增强,孙青林,等.定量反馈理论发展综述[J].控制理论与应用,2006,23(3):403 -410.WANG Zeng-hui,CHEN Zeng-qiang,SUN Qing-lin,et al. Survey of the development for quantitative feedback theory[J]. Control Theory & Applications,2006,23(3):403 -410. (in Chinese)
[9]陈明俊,李长红,杨燕. 武器伺服系统工程实践[M]. 北京:国防工业出版社,2013.CHEN Ming-jun,LI Chang-hong,YANG Yan. Weapons servo system engineering practice[M]. Beijing:National Defense Industry Press,2013. (in Chinese)
[10]方晨曦,张辉,叶佩青,等. 数控速度规划中的过象限摩擦误差约束[J].清华大学学报:自然科学版,2014,54(6):822-827.FANG Chen-xi,ZHANG Hui,YE Pei-qing,et al. High-speed feed-rate planning with friction error constraints[J]. Journal Tsinghua University :Science & Technology,2014,54(6):822 -827. (in Chinese)
[11]李晓宁,赵现枫,黄大贵,等. 基于单神经元的永磁同步电机解耦控制[J].控制理论与应用,2012,29(7):933 -939.LI Xiao-ning,ZHAO Xian-feng,HUANG Da-gui,et al. Decoupling control for permanent magnet synchronous motor based on single neuron[J]. Control Theory & Applications,2012,29(7):933 -939. (in Chinese)
[12]张福星,朱荣,熊威,等. 基于定量反馈理论的微型飞行器增稳控制器[J]. 清华大学学报:自然科学版,2010,50(2):219 -223.ZHANG Fu-xing,ZHU Rong,XIONG Wei,et al. Augmented stability controller for micro air vehicle based on quantitative feedback theory[J]. Jounal Tsinghua University :Science &Technology,2010,50(2):219 -223. (in Chinese)
