基于LLL算法的永久散射体差分干涉相位解缠
2015-11-18刘朝功
刘朝功
(天津土地交易中心,天津 300042)
在含有载波相位的数据处理中,正确求取整周模糊度的估值是很重要的环节。永久散射体技术在2001年由Ferretti 提出[1],其相位解缠也属整数最小二乘范畴。荷兰Delft 大学的Teunissen教授对模糊度提出LAMBDA 解法[2],并通过Z 变换对模糊度协方差降相关处理。由于Z 变换对整周模糊度的搜索影响很大,近期不同的整周模糊度约化方法大量提出,包括LLL 方法[3,4]、联合去相关[5]等。LLL 方法受到了越来越多的关注,本文基于此进行永久散射体差分干涉相位解缠。
1 永久散射体差分干涉相位解缠
假设永久散射体差分干涉图已经生成且永久散射体点筛选出,对同一幅干涉图K 中的相邻永久散射体点X 和点Y 做相位差分,可以得到函数模型[6-9]。

其中,Δhx为目标点相对于参考面的高程为相位高程转换系数;αd·pd为地表位移的模型;e 中包含大气误差,轨道误差,以及噪声等等随机误差。
因差分相位值是经过取模处理的,真相位差值应加上相应的整周数,故对于K 幅干涉图中的X 点和Y 点,做相位差分,有如下的函数模型(3)。假设已知地表形变的先验模型,且位移函数模型为线性位移α,那么上式中未知参数的个数是K+2,方程的个数是K,观测方程秩亏,不能得出唯一解,为此增加伪观测方程(4)。

协方差矩阵为:

其中,矩阵y1,A1和B1的含义如式(3)定义;A2为一个零矩阵02×K,B2为一个单位矩阵I2×2,观测值y2的值设为0。那么永久散射体差分干涉的函数模型和随机模型可以写为:

2 利用LLL 方法构造Z 变换
对于整数最小二乘,第一步是求出未知参数的浮点解,对模糊度方差协方差矩阵进行乔列斯基分解,用LLL 方法对权矩阵的基进行整数施密特正交变换,构造Z 变换矩阵,那么变换后的方差协方差矩阵就能够近似为一个对角矩阵,再搜索整数解,可以大大简化整周模糊度的搜索时间。基本流程图如图1 所示。

图1 基于LLL 方法的永久散射体差分干涉解缠
假设有如下的函数模型,先进行实数最小二乘求解。

其中,y∈Rn;e∈Rn;x1∈Rm1;x2∈Rm2;A1∈Rn×m1;A2∈Rn×m2,参数x1是整周模糊度,1=[1,…,m1]'是由x1得到的最小二乘解的列向量。根据加权最小二乘原理:


对b=[b1,…,bm1]'进行整数施密特变换,其中,μij=[<bi,。


为了提高基的正交性,整数施密特变换需要进行迭代计算,最后得到D+E 矩阵是近似对角矩阵,可以快速进行整周模糊度搜索。
3 仿真模拟实验
为了验证LLL 算法的正确性及可行性,利用随机模拟数据进行检验。信号模拟按照ERS1 和ERS2 的卫星参数来设置。一般情况下,主影像的噪声水平比较小,模拟的主影像的相位噪声设置为均值150;副影像的噪声设置为均值200,均方差设置为50;垂直基线方差为400 m,时间基线跨度为8年;大气信号方差2 rad;位移信息10 mm/年的速度方差;DEM 方差为40 m,模拟过程中高程小于0 的设置为0,当作海平面。一般情况下设先验的主SLC 影像的相位方差因子为(200)2,副影像的相位方差因子为(300)2。按照上述参数值,模拟真实的相位再取模,作为观测值用LLL 方法进行解算其整周值。数据模拟的信息如表1所示。

表1 永久散射体数据模拟信息
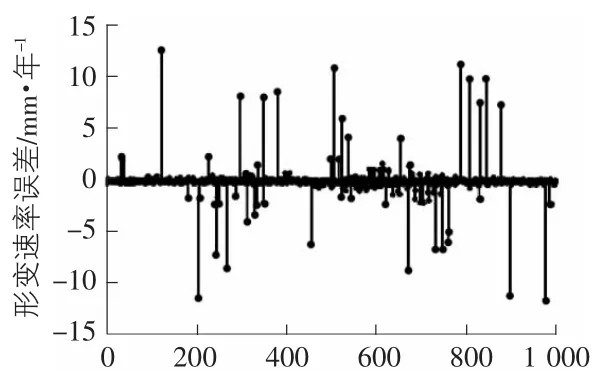
图2 模拟数据和解算结果的形变速率误差

图3 模拟数据和解算结果的DEM 误差
将模拟数据和解算结果做差,统计结果如图2,图3 所示,除个别点DEM 误差最大167 m,形变误差最大12 mm/年,95%以上的数据分布在0 左右,LLL 方法的解算结果是正确和可靠的。
4 结语
永久散射体差分干涉相位解缠是整数最小二乘的一种,本文尝试用LLL 算法构造变换矩阵,对模糊度矩阵约化,并用模拟数据进行算法的验证。该方法可以解算出正确和可靠结果,出现个别点误差很大的原因主要是LLL 方法计算正交基迭代收敛因子追求绝对正交,导致有些点发散不能收敛,这对下一步研究优化LLL 算法具有一定的启发性。
[1]Ferretti A.,Prati C.,Rocca F..Permanent scatterers in SAR interferometry[J].IEEE Transactions on Geoscience and Remote Sensing,2001,39(1) :8-19.
[2]Teunissen,P.J.G.Least-squares estimation of the intger GPS ambiguities.Invited lecture,section IV Theory and Methodology.IAG General Meeting.Beijing,1993.
[3]Hassibi A,Boyed S.Integer parameter estimation in linear models with applications to GPS.IEEE Transactions on Signal Processing,1998,46(11) :2938-2952.
[4]Grafarend E.W.Mixed integer-real valued adjustment(IRA)problems:GPS initial cycle ambiguity resolution by means of the LLL algorithm[J].GPS Solutions,2000(4) :31-44.
[5]L.T.Liu,H.T.Hsu,Y.Z.Zhu,etc..A New approach to GPS ambiguity decorrelation[J].Journal of Geodesy,1999(73) :478-490.
[6]Kampes B.,Hanssen R.F.,Perski Z..Radar Interferometry with public Domain Tools.Proceedings of Fringe 2003 Workshop.Frascati,Italy,2003.
[7]Kampes B M,Hanssen Ramon F.Ambiguity resolution for permanent scatterer interferometry[J].IEEE Transactions on Geoscience and Remote Sensing,2004,42(11) :2446-2453.
[8]Kampes B.M.,Usai S..Doris:the Delft Object oriented Radar Interferometric Software,2nd International Symposium on Operationalization of Remote Sensing,Enschede,The Netherlands,1999.
[9]Kampes B.M.Radar Interferometry:Persistent Scatterer Technique.Kluwer Academic Publishers,Dordercht,The Netherlands,2006.
[10]Hooper A.,Zebker H.A.,Segall P.,et al.A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers.Geophysical research letters,2004,31(11) :1-5.
[11]Hooper A.Persistent Scatterer Radar Interferometry for Crustal Deformation Studies and Modeling of Volcanic Deformation[D].Stanford University,2006.
