磁诱饵空中磁场验证的测量区域研究
2015-11-16刘忠乐石剑文无敌
刘忠乐,石剑,文无敌
(海军工程大学兵器工程系,湖北武汉430033)
磁诱饵空中磁场验证的测量区域研究
刘忠乐,石剑,文无敌
(海军工程大学兵器工程系,湖北武汉430033)
对潜艇施放的磁诱饵进行空中磁场验证时,高空中的磁场强度验证过程困难,可在低海拔处进行验证测量,然而磁诱饵磁场在同一海拔的不同区域具有不同的分布特征。为了确定最适合进行验证测量的区域,通过借鉴地形特征统计中的标准差、粗糙度等变化特征参数及水下地形匹配领域中的地形熵,对磁诱饵的空中磁场在目标平面上的分布情况进行分析,研究了以此为依据选择测量区域的方法。利用软件对该选择过程进行了仿真,初步验证了其可行性。并通过海上试验对该方法进行了验证。试验结果显示,通过该方法选择的测量区域的相对测量误差与其他区域相比明显较小。
电磁学;磁诱饵;标准差;粗糙度;磁强熵
0 引言
航空探潜设备[1-2]给潜艇的生存和作战造成了很大的威胁,潜艇对抗航空磁探设备的方式主要分为主动对抗方式和被动对抗方式,主动对抗方式即施放诱饵以模拟潜艇磁场。在对主动对抗方式进行研究或考核时,需要测量潜艇磁诱饵在高空中产生的磁场。如果采用飞行器搭载磁探设备的方式,需要大量的人力物力,因此对磁诱饵空中磁场进行验证测量研究就具有重要的实际意义。很多学者已经对磁诱饵的空中磁场进行了研究[3-6]。文献[3]通过研究两电极式磁场模拟装置的结构原理,推导出了其在海水中产生磁场的计算模型。文献[4]根据点电极电流密度的分布模型,推导求得点电极在海水、空气中产生磁场的计算模型。运用推导的解析表达式,可以计算海水、空气中任意点的磁场值。文献[5]针对典型航空磁探设备的性能指标,用磁偶极子磁场来等效潜艇磁场,研究了用海水中两电极所产生的磁场来模拟潜艇磁场,从而对抗航空磁探的方法。
对磁诱饵在高空中的磁场进行验证比较困难,可在低海拔处进行验证测量。然而如何在同一海拔平面上选取合适的测量区域仍是一个急需解决的难题。本文以文献[2-6]为基础,通过借鉴地形特征统计中的标准差、粗糙度等变化特征参数及水下地形匹配领域中的地形熵概念,分析比较了目标平面中的场点,并确定最适合的测量区域。
1 测量区域的选取方法研究
测量目标区域磁感应强度时,需要对测量点进行定位,不可避免的定位误差必会产生测量误差。要尽量减小由定位误差产生的测量误差,应选取磁感应强度变化比较平缓的区域作为测量点。显然,这需要对磁感应强度的分布特征进行分析,以确定磁场变化较平缓的区域。
这里,可借鉴地形特征统计中的标准差、粗糙度等变化特征参数及水下地形匹配领域中的地形熵,对磁诱饵的空中磁场在目标平面上的分布情况进行分析。
当考察一个坐标为(m,n)的点的磁场特征值时,首先确定以(m,n)为中心的大小为M×M的方形区域作为考察区域,该方形区域内等间距的(2N+1)×(2N+1)个点为局部网格点,各网格点的磁感应强度值均可求得,任意一点的磁感应强度值为B(i,j),其中i,j=-N,-(N-1),…,0,…,N-1,N.
1.1 磁场标准差
磁场标准差是磁诱饵磁场磁感应强度在被考察区域内的变化情况及离散程度的度量,其值越大,则表明磁感应强度在区域内幅值变化程度大,不利于进行测量。其定义为
式中:

1.2 磁场粗糙度
磁场粗糙度反映的是考察区域在方向上的磁感应强度值的均匀程度,其值越小,表明该区域磁强值越均匀,越有利于测量。x方向和y方向的磁场粗糙度分别为
1.3 磁强熵
熵最早是热力学中的概念,用以表征系统紊乱程度。1962年,利奥波德等根据地形学变量和热力学变量之间的相似,以地表高度值模拟物体的温度,将地理质量模拟物体的热量,建立了“地形熵”的概念,其定义式[7]为式中:Rk表示实时地形数据。
此时,地形熵Hf表示不同地形区域所包含的信息量,起伏变化相对小的地形所含的信息量相对较多,而起伏变化大的地形所含信息量则相对较少[8]。
选取测量区域时,需要确定磁感应强度值变化相对较小的区域。显然,这与地形匹配领域确定起伏变化小的地形区域是类似的。因此,可以参考地形熵的概念,场点(m,n)的磁强熵的定义式为
式中:
根据(5)式可知,当N2个P(i+m,j+n)相差较大时,其熵值则较小,反之则熵值较大。即考察区域内磁感应强度相对变化越小,其熵值越大。
由此,根据不同区域的磁场标准差δ、磁场粗糙度Rx、Ry及磁强熵HB的大小即可比较各场点的离散程度、均匀程度与“起伏变化”程度,从而确定有利于进行测量的区域。
2 仿真分析
根据磁诱饵的实际情况[5]及后续实测场地的情况,选取一组合适的数据为工作条件。载流直导线长度2a=74 m,电极长度l=0.3 m,通电电流I= 50 A,海水深度h=11.3 m,磁诱饵定深d=3 m,假定需要在海拔5 m平面上对海拔200 m平面进行测量。
首先根据模型[4]计算出海拔5 m处的磁感应强度,绘出等强线,如图1所示。
根据得出的磁场数据,取考察区域为以考察点为中心的8 m×8 m的方形区域,该方形区域内等间距的9×9个点为局部网格点,可以仿真得出目标区域的磁场标准差、磁场粗糙度及磁强熵分布情况。
2.1 磁场标准差
图2所示为海拔5 m处的磁场标准差,从中可以看出,离测量区域中心(即磁诱饵在测量平面上的投影)越近,磁场标准差的值越大,且当离测量区域中心距离小于200 m时,这个趋势非常显著。
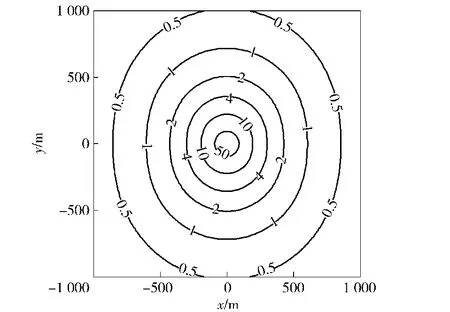
图1 海拔5 m处的磁感应强度等强线(单位:nT)Fig.1 Contour lines of magnetization at altitude of 5 m(unit:nT)
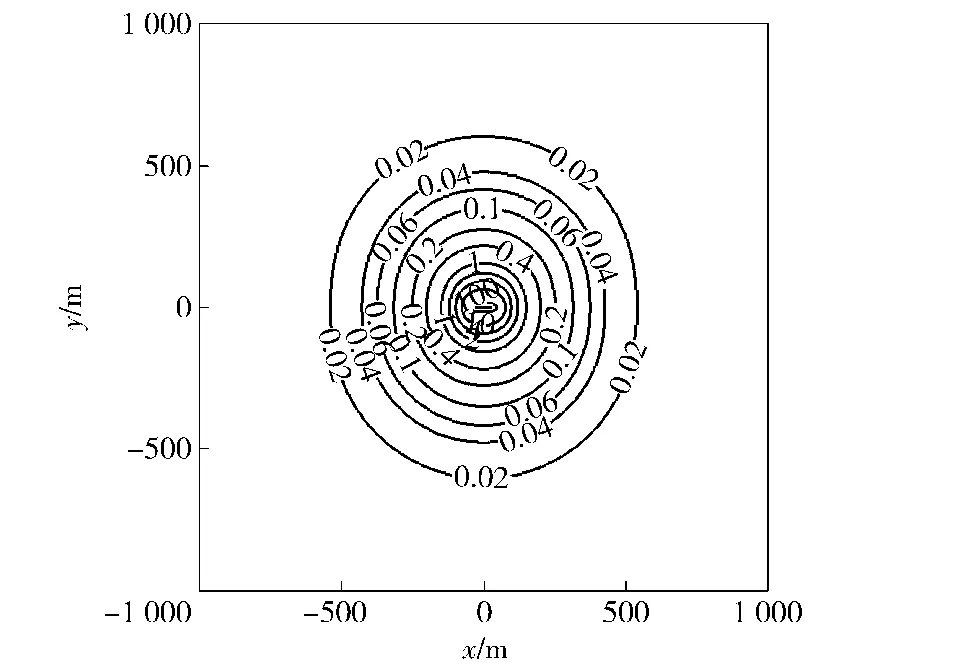
图2 海拔5 m处的磁场标准差δ等强线Fig.2 Contour lines of δ at altitude of 5 m
2.2 磁场粗糙度
图3所示为海拔5 m处x方向的磁场粗糙度Rx。由图3可以看出,Rx沿y=0对称,且呈双峰分布。
同样,由图4可以看出,y方向的磁场粗糙度Ry沿x=0对称,且呈双峰分布。
2.3 磁强熵
图5为磁强熵的分布情况,可知,坐标原点处的磁强熵值较大,其他区域场点的磁强熵值主要与该点相对O点的角度有关。
3 计算结果分析
磁强熵值越大的区域,磁感应强度相对变化越小,可由第2节得到的磁强熵分布情况,确定出磁强熵较大的区域,如图6所示。
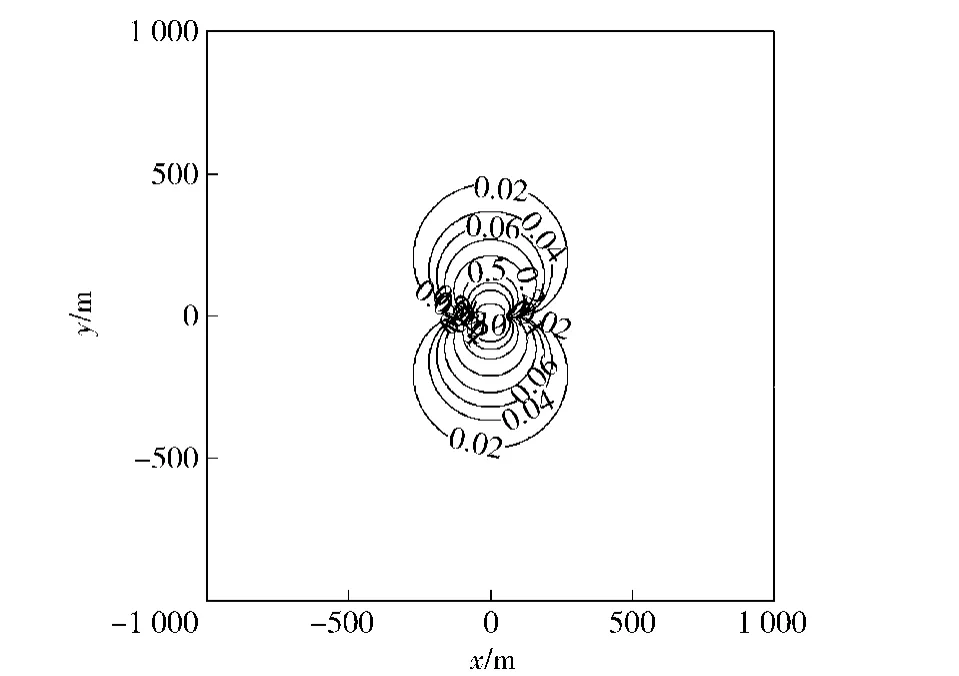
图3 海拔5 m处的磁场粗糙度Rx等强线Fig.3 Contour lines of Rxat altitude of 5 m
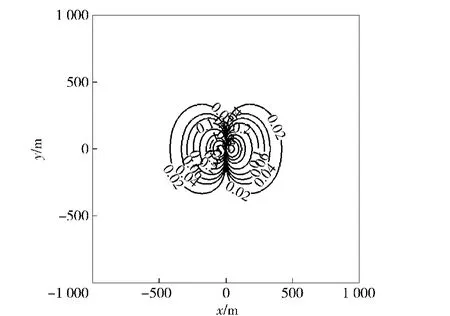
图4 海拔5 m处的磁场粗糙度Ry等强线Fig.4 Contour lines of Ryat altitude of 5 m
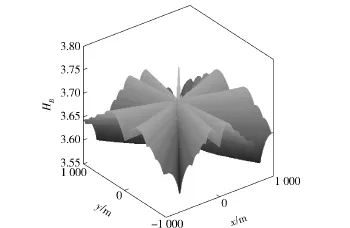
图5 海拔5 m处的磁强熵三维图Fig.5 Graphic model of HBat altitude of 5 m
再分析磁场标准差,由磁场标准差的定义可知,磁场标准差越大,则表明磁感应强度在区域内幅值变化程度大。根据图2可以看出,在磁场标准差大于0.4的范围内,其值随场点离测量区域中心的距离减小而显著增大。因此可认为磁场标准差大于0.4的范围不适于进行测量。
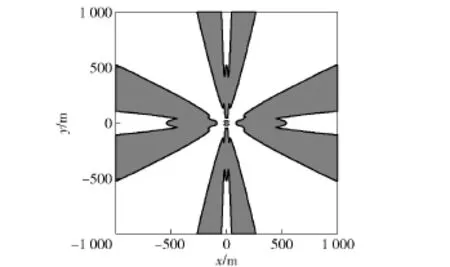
图6 满足磁强熵值的区域Fig.6 The area meeting HB
再分析磁场粗糙度,由磁场粗糙度的定义可知,其值越大,表明该区域磁强值越不均匀。根据图3、图4,在x方向的磁场粗糙度Rx大于0.04的范围内,其值增大趋势显著,在y方向的磁场粗糙度Ry大于0.04的范围内,其值增大趋势显著。因此可认为磁场Rx或Ry大于0.04的范围不适于进行测量。
至此,已得到磁强熵、磁场标准差与粗糙度3种特征参数均较好的区域。需注意的是,在进行测量时,存在因测量设备精度限制而产生的误差,因此测量区域的磁强值越大,越有利于进行测量。根据图1给出的海拔5 m处磁感应强度等强线,可选择在磁感应强度为1 nT以上的区域进行测量。由此给出如图7所示的区域图。
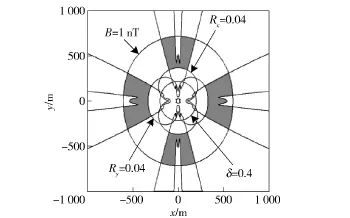
图7 满足磁强熵、磁场标准差、粗糙度与磁强值的区域Fig.7 The area meeting HB,δ,R and B
4 实验测量与验证
实验地点为大连某研究所试验海域,试验海区内海水深度变化较小,可近似认为海底与海平面平行,符合空气-海水-海床3层模型要求。
试验时主要环境参数如表1.
测量设备为Mag-03MSL100型磁场传感器,数据采集设备为DEWE_MDAQ_PCI_16型数据采集器。文献[5]对以磁模拟拖揽加电极为诱饵模拟潜艇的方法进行了技术可行性分析及设计,试验以此为基础,通过对两端各连接一个电极的磁模拟拖缆进行通电以产生磁场。
试验时,通过若干个浮球及铅坠对磁模拟拖揽进行定深,如图8所示。利用放置有GPS设备的小木船缓慢拖动拖揽使其保持直线并进行定位。
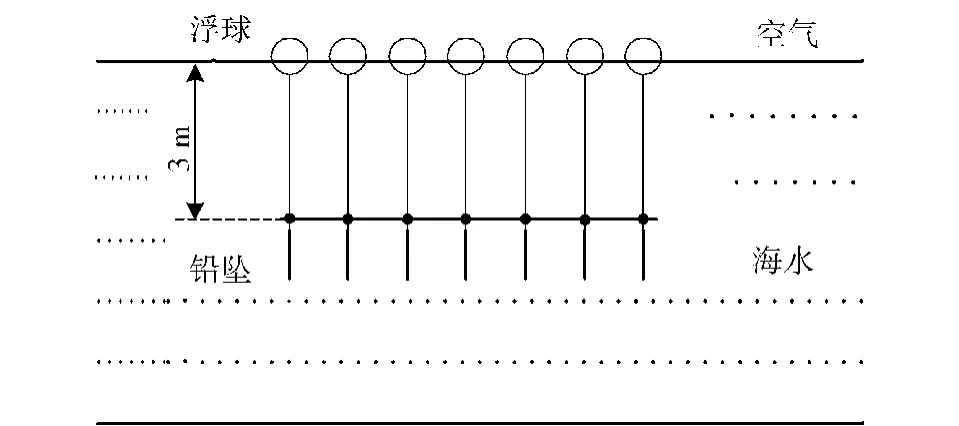
图8 拖缆定深示意图Fig.8 Schematic diagram of depth setting
在图7所示的目标区域内外各选取4个测量点,如表2所示。
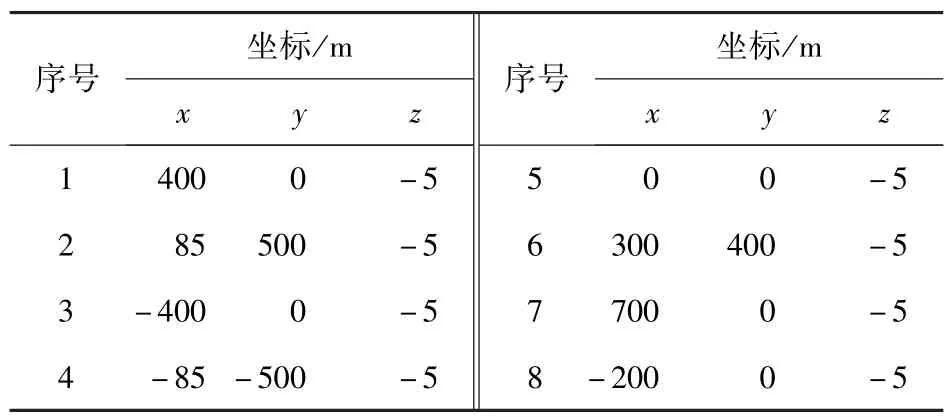
表2 测量点坐标Tab.2 Coordinates of measuring points
为尽可能减小背景磁场的干扰,试验时固定磁场传感器,通过改变磁模拟拖缆的方位以测量不同坐标的磁感应强度。且按图9所示,布设O、A、B、C和D共5个磁场传感器,其中,A、B、C和D距O均为20 m.
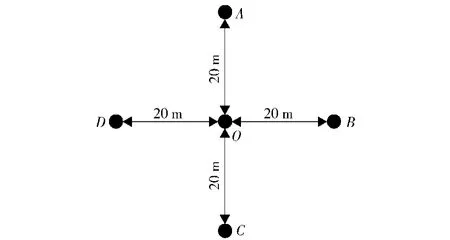
图9 磁传感器布设示意图Fig.9 Schematic diagram of layout of magnetic sensors
对磁模拟拖缆进行定位时,始终使O点处于表2中的各个测量点上,A、B、C和D的测量结果即模拟存在定位误差时的测量情况。可得到相同定位误差下(20 m)各测量点的相对测量误差,如表3.
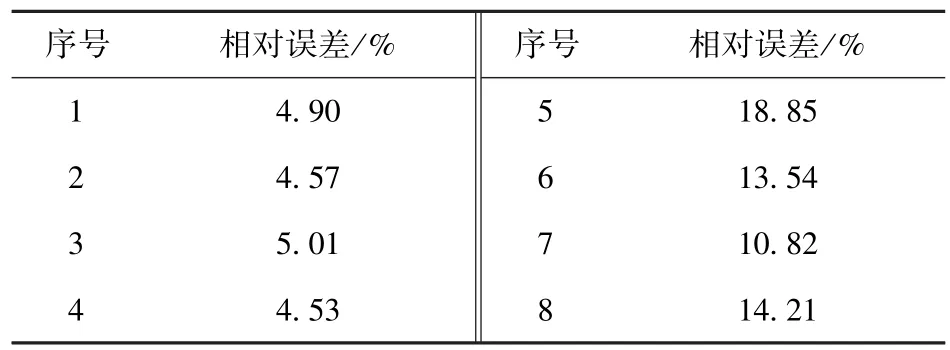
表3 相对测量误差Tab.3 Relative measuring errors
由表3可以看出,目标区域内的测量点(序号1~4)受定位误差影响明显小于目标区域外的测量点(序号5~8)。
5 结论
根据已有的磁诱饵空中磁场计算模型可以得出空气中任意点的磁场强度,本文以此为基础,通过借鉴地形特征统计参数标准差、粗糙度及水下地形匹配领域中的地形熵,研究了采用磁场标准差、磁场粗糙度及磁强熵对磁诱饵在目标平面上的分布情况进行分析,并以此为依据选择测量区域的方法。利用软件对该选择过程进行了仿真,并进行了海上试验。试验结果显示,通过该方法选择的测量区域的相对测量误差与其他区域相比明显较小。由此可知,通过分析空中磁场的磁场标准差、磁场粗糙度及磁强熵得到的目标区域可以用于进行磁诱饵空中磁场的验证测量。该方法对以后空中磁场验证的测量区域选择具有指导意义。
(
)
[1]单志超,曲晓慧,杨日杰,等.潜艇航向对直升机磁异探潜的影响[J].火力与指挥控制,2013,38(2):62-65. SHAN Zhi-chao,QU Xiao-hui,YANG Ri-jie,et al.Research on effect of helicopter magnetic anomaly detecting submarine from change of submarine heading[J].Fire Control&Command Control,2013,38(2):62-65.(in Chinese)
[2]王承祥,鞠建波,陶晨辰.航空反潜综合模拟训练系统研究与设计[J].系统仿真技术,2012,24(3):201-204. WANG Cheng-xiang,JU Jian-bo,TAO Chen-chen.Study and design on colligate training simulation system for air antisubmarine[J]. System Simulation Technology,2012,24(3):201-204.(in Chinese)
[3]温正雄,刘忠乐.非接触扫雷具设计原理[M].北京:海潮出版社,2001:50-68. WEN Zheng-xiong,LIU Zhong-le.No-contact mine-sweeper design principle[M].Beijing:Haichao Press,2001:50-68.(in Chinese)
[4]张翼超,刘忠乐.海水中电极对产生磁场的研究[J].水雷战与舰船防护,2010,18(3):25-30. ZHANG Yi-chao,LIU Zhong-le.Study of magnetic field generated by point electrode pair in sea water[J].Mine Warfare&Ship Self-Defence,2010,18(3):25-30.(in Chinese)
[5]汪晓雨,刘忠乐.基于小型运动载体的潜艇磁诱饵磁场产生方法[J].水雷战与舰船防护,2006(4):18-21. WANG Xiao-yu,LIU Zhong-le.Method of generating magnetic field of submarine magnetic bait based on small motion carrier[J]. Mine Warfare&Ship Self-Defence,2006(4):18-21.(in Chinese)
[6]文无敌,刘忠乐,李华.由空中磁场推算线电极参数及海水中电磁场分布[J].兵工学报,2013,34(11):1412-1417. WEN Wu-di,LIU Zhong-le,LI Hua.Reckon parameters of line-electrode and electromagnetic field in the seawater by magnetic field in air[J].Acta Armamentarii,2013,34(11):1412-1417.(in Chinese)
[7]王华,晏磊,钱旭,等.基于地形熵和地形差异熵的综合地形匹配算法[J].计算机技术与发展,2007,17(9):25-27. WANG Hua,YAN Lei,QIAN Xu,et al.Integration terrain match algorithm based on terrain entropy and terrain variance entropy[J]. Computer Technology and Development,2007,17(9):25-27.(in Chinese)
[8]席雷平,陈自力,李小民.基于地形熵的地形适配区选择准则研究[J].弹箭与制导学报,2010,30(4):247-249. XI Lei-ping,CHEN Zi-li,LI Xiao-min.Discussion on the navigable terrain selection algorithm based on terrain entropy[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(4): 247-249.(in Chinese)
Study of the Measuring Area in the Proving of Magnetic Field of Magnetic Decoy in Air
LIU Zhong-le,SHI Jian,WEN Wu-di
(Department of Weaponry Engineering,Naval University of Engineering,Wuhan 430033,Hubei,China)
In the proving of magnetic field of magnetic decoy discharged from a submarine in air,the magnetic field at low altitude is measured on account of the difficulty in proving the magnetic field at high altitude.However,the distribution characteristics of magnetic field of magnetic decoy are different in the different areas at the same altitude.In order to find the most suitable area to be measured,the distribution of magnetic field of magnetic decoy at a certain altitude is analyzed based on the change characteristic parameters in terrain feature statistics,such as standard deviation and roughness,and the terrain entropy in underwater terrain matching field,and a method of choosing the measuring area is studied.The choosing process of measuring area is simulated.And the sea trial is made to verify the proposed method.The results show that the relative measuring error of area chosen by this method is smaller than that of other area.
electromagnetics;magnetic decoy;standard deviation;roughness;magnetic field entropy
TJ67
A
1000-1093(2015)06-1046-06
10.3969/j.issn.1000-1093.2015.06.012
2014-05-12
刘忠乐(1964—),男,教授,博士生导师。石剑(1991—),男,博士研究生。E-mail:273024362@qq.com
