创新型搜救机器人的设计与制作
2015-11-14梁雨凤等
梁雨凤等
摘要:该文针对新型搜救机器人的紧凑型机械结构做了详细介绍,采用迷宫算法优化了机器人的搜救程序,并指出了搜救机器人在特殊场地中的应对方法,改进后的新型搜救机器人在搜救速度和搜救效率上有了大幅度提高。
关键词:搜救机器人;迷宫算法
中图分类号:TP301 文献标识码:A 文章编号:1009-3044(2015)22-0115-02
Abstract: This paper particularly describes the Compact mechanical structure based on the new search and rescue robot, adopts the maze algorithm to optimize the robot rescue program,and points out the response method of the search and rescue robot in the in a particular field.The improved new search and rescue robot has increased.
Key words: Search and rescue robot,Maze algorithm
1 引言
搜救机器人是移动机器人的重要分支,移动机器人的重要研究技术均可用在搜救机器人上面。移动机器人自60年代初问世以来,经历40多年的发展已取得长足的进步,并正在制造业、装配业等工业领域发挥着重要作用[1]。创新型搜救机器人则是在普通搜救机器人的基础上加以改进,通过对整个机器人的机械结构、程序算法等方面进行优化设计,使得机器人在运行速度、智能化程度等方面都有较大的优势,所以能够在比赛中脱颖而出。
2 创新型搜救机器人的系统框架设计
3 系统控制方案
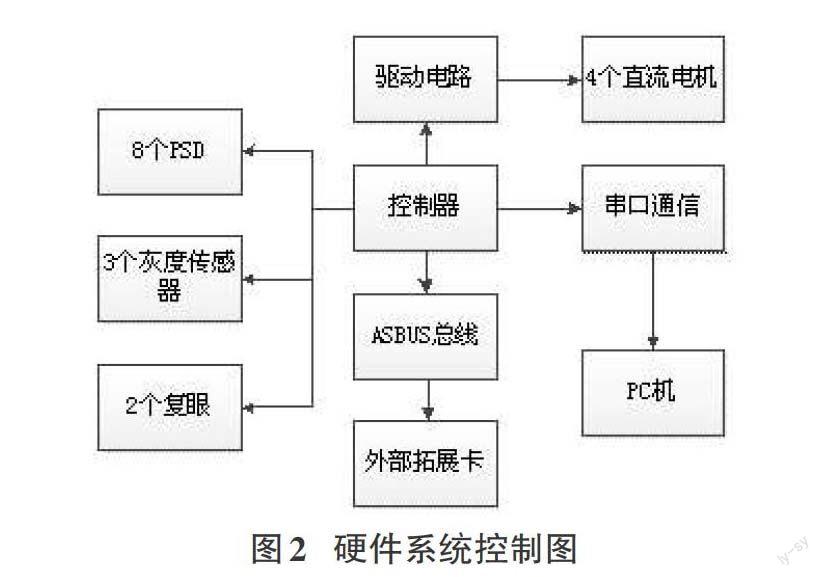
创新型搜救机器人的硬件控制系统如图2所示。采用玻纤板雕刻而成的双层结构底盘来加强机械系统的稳定性,电机、电池等“重量级”器件安装在双层玻纤板之间,芯片控制盒、驱动板则平行固定在上层板上,这样的机械结构既降低了整个机器人的重心,又使得机器人能够在运动中稳定行进。红外测距传感器有序的安装在上层玻纤板周围,灰度传感器安装在下层底板上,两个火焰传感器(俗称“复眼”)以前后对称的方式安装在搜救机器人顶部。通过三种传感器的联合作用,让机器人能够智能的避开禁区和障碍,顺利找到光源。
4 软件设计
机器人搜救问题可以近似的看成迷宫求解问题,故机器人采用一种基于右手法则来实现向心搜索迷宫算法。算法中采用(X,Y,Z)的三维模型,其中X、Y表示坐标,Z表示机器人在该坐标时行进的方向。根据右手法则,右转的优先级最高,当前方不能通行,机器人可以同时向左或向右转时,则统一选择向右转;若不能顺利通行则进入下一个优先级判断。
4.1算法实现
4.1.1避禁区算法
当灰度传感器检测到禁区时,根据前方PSD是否检测到障碍分为有障禁区和无障禁区两种情况分析。
1)有障禁区 本算法主要采用右手法则来实现向心搜索,当前方PSD检测到障碍,如果机器人左右兩侧都检测到禁区时,机器人退出禁区后右转一个较大角度,按新方向摆正后继续前进再检测是否有障碍禁区;如果机器人左侧灰度传感器检测到禁区时,机器人退出禁区后右转,相反则左转。
2)无障禁区 当前方PSD未检测到障碍,但左右两侧出现障碍时,让机器人一直退到左右两侧PSD检测不到障碍的位置,若此时有光,机器人向光的方向转向、前行,若此时无光,向右侧转向、前行。若左右两侧没有障碍,其处理方法与有障禁区相同。
4.1.2避障碍算法
避开障碍的算法与避开禁区的算法类似,但在实际情况中前方障碍物的位置是不定的,如果用避禁区的算法来避障碍虽然可行,但其得出来的路径往往不是最短的,为了提高搜索的有效性,应根据前方障碍物的位置对避障的方法进行相应的调整。在此就障碍物可能出现的位置以及是否有光分别做以下几点讨论:
1)若障碍物仅出现在机器人的正前、左前或右前方时,算法与有障禁区相同。
2)机器人的左前方和正前方均有障碍物时,若无光该机器人会右转绕开障碍物,若有光则向有光的方向转向;右前方和正前方均有障碍物时,若无光机器人左转绕过障碍物,若有光则向有光的方向转向
3)机器人的正前方、左前方和右前方均有障碍物时,若无光,该机器人会后退一段距离再右转,若有光,该机器人将会后退一段距离再向有光的方向转向[3]。
4.1.3趋光算法
由复眼中红外接收管的分布特点可知,当前方复眼最中央的一对红外接收管接收到的光值为最大时,可以认为此时机器人正对着光源方向。要实现趋光,只需在行进过程中不断读取14个端口的光值,确定光值最大值以及最大值所对应的端口,然后依此调整摆正机器人的运动方向,最终使机器人正对着光源行驶。
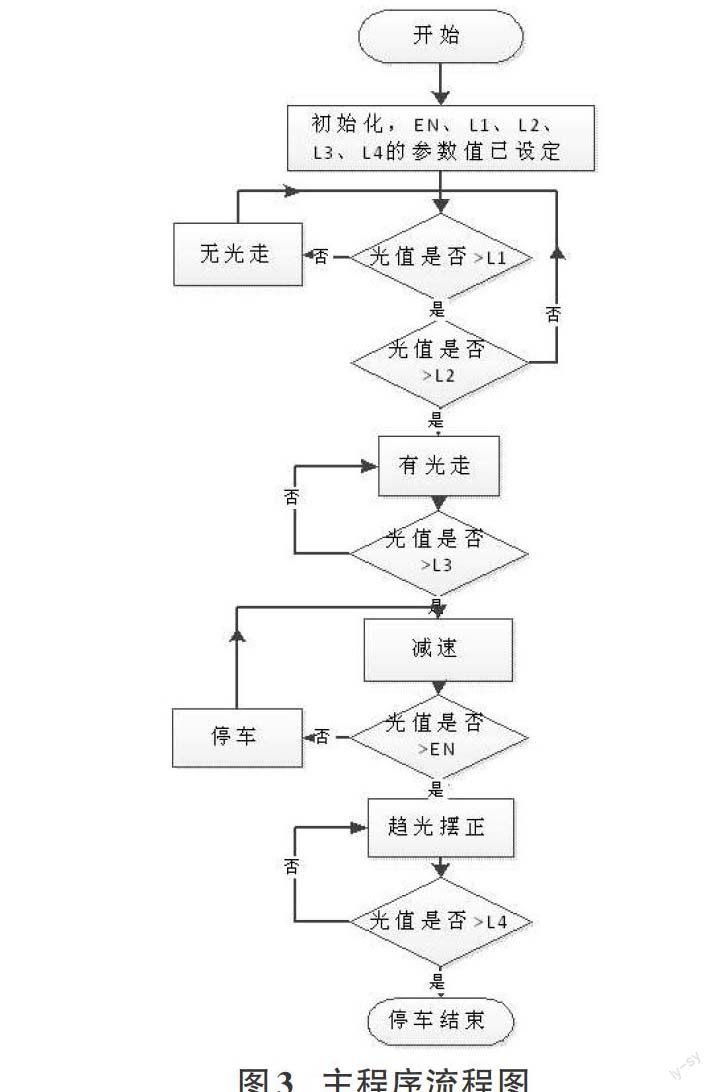
4.2主程序流程
任意时刻复眼接收到的光值的最大值为EM,光源灭时环境光值为L1,光源亮时,离光源较远时的光值参数设为L2,当检测到的光值大于L2时机器人调用有光走的函数;离光源近时的光值参数设为L3,当检测到的光值大于L3时,光源亮则减速前进,光源灭则停止前进,防止撞上目标;当距目标2.5cm处的光值参数设为L4,当检测到的光值大于L4时,机器人找到目标,停止运动并报警。主程序流程图如图3所示。
4.3算法优化以及智能化程度测试
通过对未知场地的适应性来测试机器人的智能化程度是一项极为重要的性能指标。在复杂多变的场地中,有些特殊区域是搜救机器人在普适的情况下不能逾越的,这种特殊区域俗称为“死区”,机器人进入“死区”后便不断做重复运动。
若机器人的右前方灰度传感器检测到右侧有禁区,与此同时机器人的左前方摆设了障碍。假设此时无信号灯,机器人首先会向左偏转,偏转过后障碍进入了左上 PSD的检测范围,机器人将向右偏转。执行完这些操作后机器人会前进一段距离,等待1.2s后光源亮,机器人趋光运动,机器人的右侧灰度再次进入禁区,如果机器人的搜索策略不进行调整,这个过程会不断循环,这就是“死区”。在“死区”中不仅耗费时间,而且很容易碰大障碍,解决这类死区问题有两种方法:
方法一:读出小车在死区内各传感器的参数,然后利用这些参数编写程序,使得这种特殊情况能够被识别,然后再调用特殊函数处理这类情况。
方法二:引入一个参数,以编码的形式自动记录上一个状态,经与现在的状态综合处理后,得出下一时刻的操作。
算法的多面性是机器人行进时灵活性、准确性的基础,多重判断和特殊情况处理的双重结合让创新型机器人在不同的场地中能够迅速找到光源。通过对多种场地的适应性测试,逐渐改进创新性搜救机器人对各种地形的适应性,从而提高机器人的智能化程度。
5 机器人的调试与优化
创新型搜救机器人的调试是将程序通过USB数据线下载到AS-MF10控制器中,然后在场地试行,从而反映出存在的缺陷,再通过修改程序及参数逐步让机器人能够在短时间内找到光源。参数设置的不合理时,前进速度、转角度数值波动大时搜救机器人在行进的过程中会产生较大的振动,经过多次的参数设置与实际测试才能够获得一组最佳的参数。在比赛中,创新型搜救机器人的行走速度快、搜救时间短,以下是比赛前三名的搜救成绩,如表1所示(A队代表创新型搜救机器人队,B、C队代表传统搜救机器人队)。
在调试的过程中也反映出搜救机器人的一些不足。在机械结构方面,整体构造偏大,不易通过较窄的通道,在较窄通道内转弯不灵活,若长方形的底盘改为圆形底盘会有更佳的效果,但是也将会降低整个机器人的稳定性,降低行走速度。
6 结束语
本文设计的创新型搜救机器人是在传统比赛用搜救机器人的基础上对机械结构、程序算法加以改进,引入迷宫算法大大缩短了搜救时间。通过对整体机械结构的紧凑化以及特殊场地中的智能化,让搜救机器人在比赛、演示等场合都能取得良好的表现。
参考文献:
[1]谢爱珍. 搜救机器人运动控制系统完善与改进[D]. 山东:山东大学,2011.
[2]上海未来伙伴机器人有限公司.未來伙伴杯公司AS-MF 10控制器使用手册[z].
[3] 帅晨,余晶,胡慧. 比赛用搜救机器人的设计[J]. 科技广场,2013(10):247-248.
