纵倾角对轻型轮式两栖车辆的阻力特性影响研究
2015-11-11剧冬梅项昌乐周鹏飞肖南溪刘静
剧冬梅,项昌乐,周鹏飞,肖南溪,刘静
(1.北京理工大学机械与车辆学院,北京100081;2.中国兵器科学研究院,北京100089)
纵倾角对轻型轮式两栖车辆的阻力特性影响研究
剧冬梅1,2,项昌乐1,周鹏飞1,肖南溪1,2,刘静2
(1.北京理工大学机械与车辆学院,北京100081;2.中国兵器科学研究院,北京100089)
提高两栖车辆航速的有效途径之一是减小整车阻力,为了研究纵倾角对阻力特性的影响,采用数值计算的方法研究了轻型轮式高速两栖车辆水上航行的阻力特性,数值计算结果和试验取得了较好的一致。研究结果表明:当车体纵倾角较小时,随着航速的增加,阻力逐渐增大;当车体纵倾角较大时,随着航速的增加,阻力先增大后趋于稳定;当航速较小时,纵倾角对阻力影响较小;当航速较大时,随着纵倾角的增大,阻力先减小后增大;随着航速的增加,车体纵倾角的适航范围变小,但对阻力的影响幅度变大。
兵器科学与技术;高速两栖车辆;阻力特性;数值计算
0 引言
随着两栖车辆的发展,其水上高航速性能变得越来越重要。减小航行阻力是提高航速的有效途径之一,而这需要对航行姿态、车辆水动力构型、车辆参数等因素对水上性能的影响有全面的了解。研究两栖车辆的水上航行性能,准确把握其绕流场形态和水上航行阻力特性是解决问题的关键。两栖车辆水上航行问题是由空气和水组成的具有相互作用的多相流对两栖车的绕流问题。目前从理论上对多相流的研究依然是难点,并且由于两栖车外形复杂,会引起周围的湍流流动,因而对此问题的研究一直受到关注。近年来兴起的计算流体力学发展很快,并且在船舶领域得到了迅速而广泛的应用。两栖车辆作为一种特殊船体,其水上性能的研究与船舶有很大的相似性[1]。对于高速两栖车辆的数值计算,近年来国内各科研院所做了大量的工作。万晓伟等对高速航态下的数值计算方法进行了研究[2],李玉良等应用数值计算的方法对提高两栖车辆水上行驶速度的车体设计方案进行了研究[3]。即便如此,采用数值计算方法准确计算高航速下两栖车辆的阻力以及摸清其阻力特性依然是亟待解决的问题。两栖车辆水上航行的阻力受诸多因素的影响,包括车体长宽比、车重、航行纵倾角等。本文主要研究航行纵倾角对于高航速轻型轮式两栖车辆的阻力特性的影响。
本文对高速航行状态下轻型轮式两栖车辆的阻力特性进行了数值计算,并和试验数据进行了对比分析。在此基础上,研究了纵倾角对高速两栖车辆的阻力特性,并分析了车体绕流场情况。计算所采用车体外形如图1所示。
车体阻力系数定义如下:
式中:Cd为车体阻力系数;F为车体阻力;ρ为水的密度;v为车速;A为车体湿面积。
车体航速通过弗劳德数表示,定义如下:

式中:Fr为弗劳德数;g为重力加速度;V为排水体积。
1 数值计算方法
两栖车辆在水上航行时,同时与空气和水接触,并使水面形成剧烈的变化。因而,两栖车辆水上航行问题是带自由表面的绕流问题,自由表面即为水和空气的交界面。水被认为是不可压缩牛顿流体。同时,由于速度比较低,空气也可看做不可压缩流体[4]。
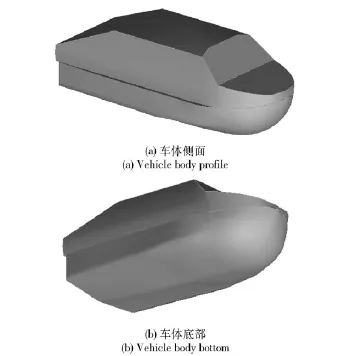
图1 车体外形Fig.1 Vehicle body shape
1.1流动控制方程
对上述两栖车辆绕流问题的物理过程可简化为:流场入流均匀、不可压缩;车体为固定参考系,给定来流速度;速度恒定时,流动视为定常湍流。
基于上述简化假设,对于整个流场可知:
连续性方程

动量方程[5]

式中:f为体积力矢量;Δp为压力梯度;ρf为流体密度;μf为流体粘度;D为粘性应力张量;σκδ(d)n为集中在相界面上的表面张力,其中σ为表面张力系数,κ为相界面的曲率,d为计算区域中的点与相界面的垂直距离,δ为Dirac Delta函数,n为相界面上法向朝外的单位向量。
数值计算中处理多相流动问题的方法有多种,目前应用较多的有Level Set方法和Mixture两种。Level Set方法是近来发展起来的一种计算多相流的方法,适用于处理两栖车辆水上航行的数值计算问题。流体物性借助Level Set函数φ和Heaviside函数H[5],使得动量方程的求解更方便。
基于上述Level Set计算方法,本文依托CFX软件进行数值计算,多相流模型采用自由表面模型,并在相间传递中选择自由表面[6]。在整个计算域给定初始静压强分布,考虑水气两相和重力影响。
1.2湍流模型
湍流模型选择标准k-ε模型适用于计算两栖车辆水上航行的问题,可参见文献[6]。湍流边界层采用可依比例缩放的壁面函数法。标准k-ε模型的控制方程[5]为

式中:k为湍动能;uj为j点速度;t为时间;xj为j点坐标;Pt为湍动能生成项;ε为湍流耗散率;μm为分子粘性系数;μt为湍流粘性系数;σk为k的湍流普朗特数,σk=1.0.

式中:σε为ε的湍流普朗特数,σε=1.3;Cε1= 1.44,Cε2=1.92.
1.3计算域与边界条件划分
图2(a)为计算区域及边界条件示意图,其中a、b、c分别为车体的长、宽、高。网格质量直接决定计算的收敛性、效率和精度,因此应根据流场中各物理量的分布特点对计算域进行合理的网格划分。由于本文所采用的两栖车体外形较为复杂,故采用混合网格的划分方式。根据计算经验,选择距离车体外表面1/2车体高度的范围内加密非结构化网格,这是因为车体外形结构比较复杂,采用结构化网格难以满足其贴合性;而且,车首、底部及车尾等车体周围的流动复杂,湍流尺度较小,也要求进行网格加密,如图2(b)所示。距车体较远的外部流场采用结构网格,以便提高计算效率,减少计算量。此外,由于车体周围的绕流变化较剧烈,因而对水面附近的网格也进行了加密处理。
对于车体近壁面采用三棱柱网格,第一层网格质心到壁面的无量纲距离在20~100之间,符合近壁面网格尺度要求,如图2(c)所示。
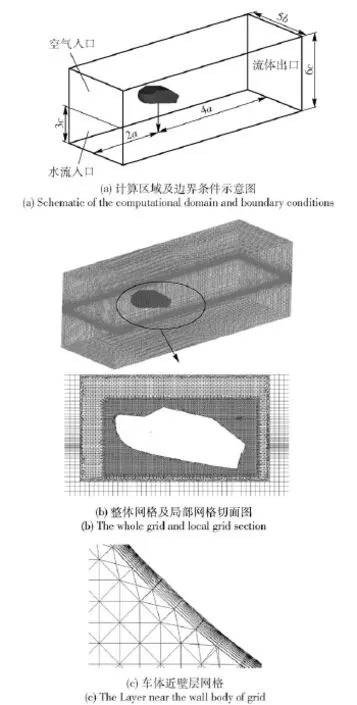
图2 计算区域设置及网格划分示意图Fig.2 Schematic diagram of computational domain settings and meshing
1.4网格无关性验证
根据上述网格划分方法及边界条件的设置,通过逐步增大网格数验证其对车体阻力的影响,阻力系数随网格数的变化如图3所示。
当整体网格数达到120万以后,阻力系数基本不再随网格数而改变。基于此,在保证计算精度的条件下,考虑到计算速度和计算机性能,选定计算网格数为120万。

图3 网格数与阻力系数的关系曲线Fig.3 Grid number vs.drag coefficient
1.5车体航行姿态的调整策略
车体升沉的调整和纵倾角的调整是相互影响的,并不能独立进行。例如,车体水线调整平衡了,但对重心力矩并不为0,则需要调整纵倾角,一旦纵倾角改变,车体所受升力必然变化,则要求进一步调整车体升沉,因而两栖车辆升沉和纵倾角的调整需要协同进行。
图4给出了车体姿态调整的流程图。其中:G0、h0分别为车体重力和预估的初始水线位置;N′=N/(ρL3v2/2),为车体对重心力矩的无量纲表示,L为车体长度;FL为车体所受升力;ΔG为车体升力和重力的差值;h为水线位置。
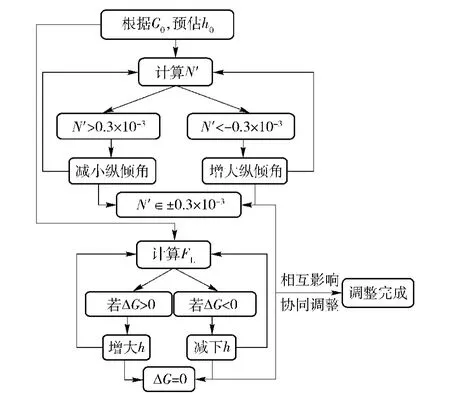
图4 车体姿态调整流程图Fig.4 Vehicle attitude adjustment procedure
对于车体升沉和纵倾的综合调整流程图,简要概述如下:
1)若升力<车体重力,且力矩为负,需要增大纵倾角。
2)若升力>车体重力,且力矩为正,需要减小纵倾角。
3)若升力<车体重力,且力矩为正,需要上调水线。
4)若升力>车体重力,且力矩为负,需要下调水线。
5)当合力对重心的力矩为负值时,需要增大纵倾角。
6)当合力对重心的力矩为正值时,需要减小纵倾角。
7)上调水线会减小力矩值,下调水线会增大力矩值。
2 数值结果和试验结果对比分析
本文的试验工作是在长160 m、宽7 m、深3.7 m的拖曳水池中进行的,拖车为空腹梁结构,全数字式直流调速系统,速度范围0.01~8 m/s,速度精度为±1 mm/s,试验环境如图5所示。模型缩尺比为1∶5,船模采用木质结构,表面油漆光滑。图6为船体型线图及车模拖曳方式示意图。

图5 拖曳水池试验环境Fig.5 The test environment of towing pool
拖点位置为推力轴线和重心纵向位置线的交点;阻力仪用于记录车体航行阻力;首尾升沉记录装置用于记录车体航行时首尾升沉量,并可由此计算出车体航行纵倾角;首尾导航板用于防止车体偏航。具体试验方法执行《CB/Z 244—88滑行艇船模阻力测试方法》。
计算的边界条件设置:入口为速度入口;出口为自由出流;侧边界采用固壁;底部边界采用固壁;顶部边界影响较小,同样采用了固壁。车体距离固壁的距离按照试验时车体的位置设置,从而保证了计算的边界条件与试验工况保持高度一致。数值计算结果和试验结果如图7所示。图中横坐标为弗劳德数Fr,纵坐标为单位排水量总阻力R/D,其中总阻力R为车体所受实际阻力,排水量D为车重。
计算结果表明:数值计算结果和试验结果吻合较好,采用的数值计算方法能够较好地模拟不同航速下特别是高速状态下车体的阻力特性。随着Fr数的增加,阻力呈现先增加后减小的趋势,车体从排水状态逐渐过渡到滑水状态。在Fr=1.648时,阻力系数出现峰值,此时车体所受阻力达到最大。在高速段,随着Fr数的增加,车体阻力迅速减小,但阻力的下降速度逐渐减小。这是因为,在低Fr数情况下,车体动升力较小,因而车体湿面积减小缓慢(如表1所示)。根据弗劳德假定[7-8],车体的阻力与航速的平方呈正比,因而在这个阶段随着航速的增加车体阻力呈上升趋势。但当Fr>1.648以后,车体动升力较大,车体抬升显著,车体湿面积迅速减小,从而车体阻力呈快速下降趋势。
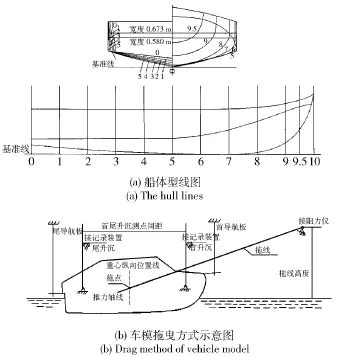
图6 船体型线图及车模实验原理Fig.6 Hull lines and experimental principle of model

图7 单位排水量总阻力对比Fig.7 Comparison of total resistances per unit displacement

表1 车体湿面积Tab.1 Wet areas of vehicle body
图8为航速48.3 km/h状态下数值计算与拖模试验的波形对比,从车首和车尾的波形对比可以看出,数值计算的流动现象与拖模试验高度相似,准确度较高。
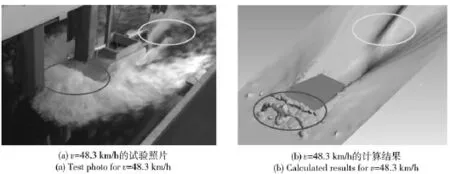
图8 拖模试验与数值计算的波形对比Fig.8 Comparison of drag model test and numerically calculated waveforms
3 纵倾角对阻力特性的影响分析
本文采用上述车体模型和计算方法,计算了不同Fr数和不同纵倾角下车体所受的航行阻力,得出了不同纵倾角下两栖车辆的阻力特性,如图9所示。由图9可以看出:在小纵倾角(≤5°)情况下,阻力特性曲线斜率从0.284增大到0.789,这说明随着Fr的增加,车体阻力呈加速增大的趋势;在大纵倾角(≥10°)情况下,阻力特性曲线斜率从0.260减小到0.018,这说明随着Fr的增加,车体航行阻力先增大(Fr≤1.653),后趋于稳定(Fr>1.653),在R/D=0.25附近波动,波动幅度在15%以内。
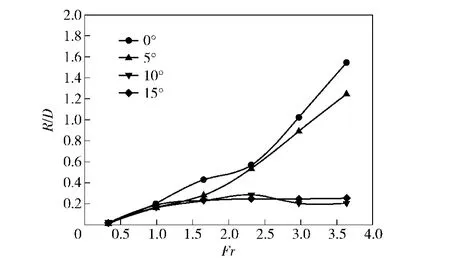
图9 不同纵倾角下的阻力特性曲线Fig.9 Resistance characteristic curves at different trim angles
造成以上趋势的主要原因是纵倾角对动升力的影响显著:在小纵倾角(≤5°)情况下,随着Fr数的增大动升力增加缓慢,车体抬升较小,此时根据弗劳德假定,车体阻力逐渐增大;在大纵倾角(≥10°)情况下,随着Fr数的增大动升力加速增大,车体显著抬升,车体湿面积减小,由于弗劳德假定的同时影响,车体阻力趋于稳定。
为了进一步描述两栖车辆在不同工况下的航态和阻力的情况,表2给出了3组典型工况的车体绕流形态图。
由表2可以看出,纵倾角为0°时车体基本处于埋首或浸水状态,故不论Fr数大小均要使车体保持一定的纵倾角;当Fr=3.638时,即使纵倾角为5°仍然出现埋首现象,故此时车体需要保持较大的纵倾角。
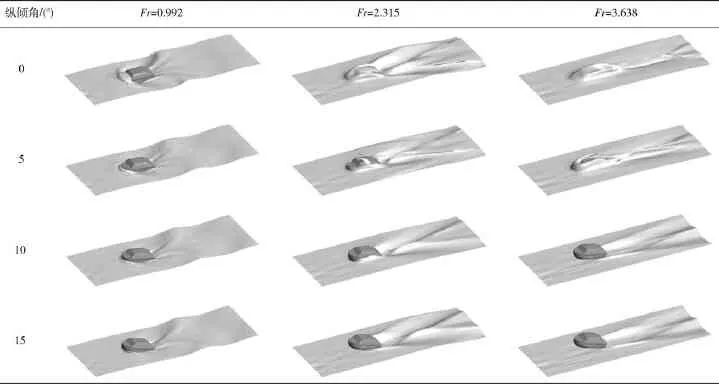
表2 不同Fr数下车体的绕流形态Tab.2 The flow around the body in the form of different Fr number
结合图10和表2可以看出,在相同的Fr数下,随着纵倾角的增大,车体的首部兴波逐渐减小,当纵倾角大于10°以后,首部兴波消失,因而在大纵倾角(≥10°)下兴波阻力迅速减小。与此同时,依然存在形状阻力和摩擦阻力(空气阻力忽略不计),纵倾角越大,车体尾部边界层分离越严重,从而形状阻力越大,而且随着Fr数的增加,摩擦阻力也会变大,从而在纵倾角为15°时总阻力比10°略有增大。
以影响因子Δ表示纵倾角对车体阻力的影响程度,定义如下:

式中:(R/D)max为在Fr数不变的情况下改变纵倾角所得到的车体阻力最大值;(R/D)min为最小值。
图10给出了R/D随纵倾角的变化趋势,可以明显看出,随着Fr的增大,纵倾角对车体阻力的影响越来越大。当Fr=1.653时,Δ>40%,因而在高速状态下必须考虑纵倾角的影响。

图10 纵倾角对R/D的影响Fig.10 Effect of trim angle on R/D
图11给出了Δ-Fr图,可以看到随着Fr数的增加,影响因子Δ呈线性增加的趋势。也就是说,航速越高,纵倾角对车体阻力的影响越大。

图11 Δ-Fr图Fig.11 Δ-Fr
综合表1和图9、图10可以得出:纵倾角过小(如0°)会引起埋首现象,过大(如15°)会使得车体阻力变大,因而存在着车体纵倾角的合理区间。随着Fr数的增加,车体纵倾角的合理区间变小,但对车体阻力的影响变大,因而对航姿的控制越来越重要。
研究高速两栖车辆水上航行的阻力特性,可以得出其在静水中直线匀速航行时克服水阻力所需的功率,这一功率称为有效功率[9]。有效功率直接决定着两栖车辆的发动机功率。图12给出了不同Fr数下车体的有效功率,图中,P/D为单位排水量总功率,P为有效功率。由图12可以看出:在小纵倾角(≤5°)情况下,随着Fr数的增加,有效功率迅速增大;在大纵倾角(≥10°)情况下,随着Fr数的增加,有效功率先增大、后趋于平稳。当Fr数较小时(Fr≤0.992),纵倾角的改变对有效功率的影响≤20%,且低速时有效功率较小,因而可以不考虑纵倾角的影响;当Fr数较大时(Fr≥1.653),纵倾角对有效功率的影响>40%,且有效功率增大,因而在高速情况下必须考虑车体纵倾角(即航行姿态)的影响。

图12 P/D曲线Fig.12 P/D curves
4 结论
本文采用数值计算方法针对轻型轮式两栖车辆的阻力特性进行了计算分析,结果表明该数值计算方法能够较好地模拟不同航速下特别是高速状态下车体的阻力特性。通过计算分析,纵倾角对轻型轮式两栖车辆阻力特性的影响有如下结论:
1)在小纵倾角情况下,随着Fr数的增加,车体航行阻力呈逐渐增大趋势;在大纵倾角情况下,随着Fr数的增加,车体航行阻力先增大,后趋于稳定。
2)随着Fr数的增加,纵倾角的改变对车体航行阻力的影响越来越大。在高速航行状态下,航行纵倾角是必须要考虑的因素。
3)纵倾角过小(如0°)会引起埋首现象,过大(如15°)会使得车体阻力变大,因而存在着车体纵倾角的合理区间。随着Fr数的增加,车体纵倾角的合理区间变小,但对车体阻力的影响变大,因而对航姿的控制越来越重要。
(
)
[1]徐国英,王涛,郭齐胜.基于CFD(计算流体动力学)的两栖车绕流场模拟[J].船舶,2005,4(2):20-23. XU Guo-ying,WANG Tao,GUO Qi-sheng.Simulation of the amphibious vehicle's ambient flow field based on CFD(calculated flow dynamic)[J].Ship&Boat,2005,4(2):20-23.(in Chinese)
[2]万晓伟,王涛,姚新民.两栖车辆水上高速航态的数值仿真方法研究[J].计算机仿真,2006,2(6):323-327. WAN Xiao-wei,WANG Tao,YAO Xin-min.Study on numerical simulation method for high speed navigation state of amphibious vehicle[J].Computer Simulation,2006,2(6):323-327.(in Chinese)
[3]李玉良,潘双夏.提高两栖车辆水上行驶速度的车体设计方案研究[J].兵工学报,2007,28(9):1116-1121. LI Yu-liang,PAN Shuang-xia.Research on amphibious vehicle body design concepts for raising its navigation speed[J].Acta Armamentarii,2007,28(9):1116-1121.(in Chinese)
[4]高富东,姜乐华.两栖车辆绕流场数值模拟及外形优化[J].汽车科技,2008,1(1):28-32. GAO Fu-dong,JIANG Le-hua.Numerical simulation of viscous flow field around an amphibious vehicle and optimization of the geometrical characteristics[J].Auto Mobile Science&Technology,2008,1(1):28-32.(in Chinese)
[5]Ducoin Antoine,Huang Biao,Young Yin-lu.Numerical modeling of unsteady cavitating flows around a stationary hydrofoil[J].International Journal of Rotating Machinery,2012,Article ID:215678.
[6]周鹏飞,刘影,韩占忠,等.高速两栖车辆水上航行阻力特性数值分析[J].车辆与动力技术,2013(4):1-5. ZHOU Peng-fei,LIU Ying,HAN Zhan-zhong,et al.Numerical analysis of resistance characteristics for high-speed amphibious vehicle sailing on water[J].Vehicle&Power Technology,2013(4):1-5.(in Chinese)
[7]姜次平,邵世明.船舶阻力[M].上海:上海交通大学出版社,1985. JIANG Ci-ping,SHAO Shi-ming.Ship resistance[M].Shanghai:Shanghai Jiaotong University Press,1985.(in Chinese)
[8]赵边恩.高性能船舶水动力原理与设计[M].哈尔滨:哈尔滨工程大学出版社,2001. ZHAO Bian-en.Principle and design of high performance ship hydrodynamics[M].Harbin:Harbin Engineering University Press,2001.(in Chinese)
[9]全国科学技术名词审定委员会.船舶工程名词[M].北京:科学出版社,1998. China National Committee for Terms in Science and Technologies. Chinese terms in ship engineering[M].Beijing:Science Press,1998.(in Chinese)
Analysis of the Effect of Trim Angle on the Resistance Characteristics for Wheeled Amphibious Vehicle
JU Dong-mei1,2,XIANG Chang-le1,ZHOU Peng-fei1,XIAO Nan-xi1,2,LIU Jing2
(1.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China;2.Ordnance Science and Research Academy of China,Beijing 100089,China)
One of the effective ways to increase the speed of amphibious vehicle is to reduce the overall resistance.In order to research the influence of trim angle on the resistance characteristics,a numerical calculation method is used to research the resistance characteristics of high speed wheeled amphibious vehicle.The numerical results are in good agreement with the experimental results.The research results show that the resistance increases with the increase in speed when the vehicle trim angle is small;it increases first and then tends to be stable with the increase in speed when the vehicle trim angle is bigger. When the speed is low,the trim angle has a small influence on longitudinal resistance;when the speed is higher,the resistance decreases first and then increases with the increase in trim angle.As speed increases,the vehicle trim angle becomes smaller,but the resistance increases.
ordnance science and technology;high-speed amphibious vehicle;resistance characteristics;numerical calculation
TJ811+.6
A
1000-1093(2015)01-0019-08
10.3969/j.issn.1000-1093.2015.01.003
2014-02-11
总装备部预先研究项目(51314010302)
剧冬梅(1983—),女,副研究员。E-mail:ju-dongmei@163.com