换挡过程两换挡执行元件充放油交替方法研究
2015-11-11李春芾陈慧岩
李春芾,陈慧岩
(1.内蒙古大学交通学院,内蒙古呼和浩特010070;2.北京理工大学机械与车辆学院,北京100081)
换挡过程两换挡执行元件充放油交替方法研究
李春芾1,陈慧岩2
(1.内蒙古大学交通学院,内蒙古呼和浩特010070;2.北京理工大学机械与车辆学院,北京100081)
液力机械自动变速器(AT)换挡过程中两个换挡执行元件充放油交替过程时序不当会造成动力中断或重叠过多(俗称“挂双挡),并引起功率损失、换挡冲击及加剧换挡执行元件磨损。以艾里森大功率自动变速器(HD4070PR自动变速器)为研究对象,利用拉格朗日方程建立换挡过程的动力学方程,依据所建立的方程分析升降挡过程中两换挡执行元件充放油交替方法,并通过自行开发的电控系统进行了实车试验验证。研究结果表明:对于升挡过程通过合理的动力搭接既可以实现无动力中断换挡,又可以减小换挡冲击;对于降挡过程不可避免出现动力中断,只能尽可能地降低动力损失。
控制科学与技术;液力机械自动变速器;换挡执行元件;交替定时方法
0 引言
液力机械自动变速器换挡过程控制关系到换挡品质以及离合器或制动器的使用寿命,关键在于,一是离合器油压的缓冲控制,二是两换挡执行元件充放油的交替方法(动力搭接原则)。两换挡执行元件充放油的交替过程实质就是两换挡执行元件动力搭接的过程。如果搭接不当,则会出现动力中断或换挡冲击[1]。关于离合器油压缓冲控制技术已有大量的研究,但对换挡过程两换挡执行元件充放油交替方法的研究还比较少见,特别对降挡过程的分析尤其少见。本文利用拉格朗日方程建立换挡过程的动力学方程,通过所建立的方程来分析升挡和降挡过程理想的交替方法,即由转矩相向惯性相过渡的理想搭接原则,并通过实车试验进行验证。
1 换挡过程动力学方程
图1为HD4070PR自动变速器2挡升3挡的动力学模型,图中C代表离合器,B代表制动器。2挡工作的元件有C1、B3,3挡工作的换挡元件有C1、B2,那么2挡和3挡之间升降挡时,实际上就是B2和B3之间的交替工作。下面依据所建立的模型推导换挡过程动力学方程。
图1中,Me、Mt、Mo分别为发动机转矩、涡轮转矩、变速器输出轴输出的转矩,Je、Jt、Jo、JV分别为发动机-泵轮构件转动惯量、涡轮-输入轴-离合器(C1、C2)主动部分转动惯量、输出轴转动惯量、整个车辆与输出轴相联的惯量换算到输出轴上的转动惯量,ωe、ωt、ωo分别为发动机角速度、涡轮轴角速度、输出轴角速度。
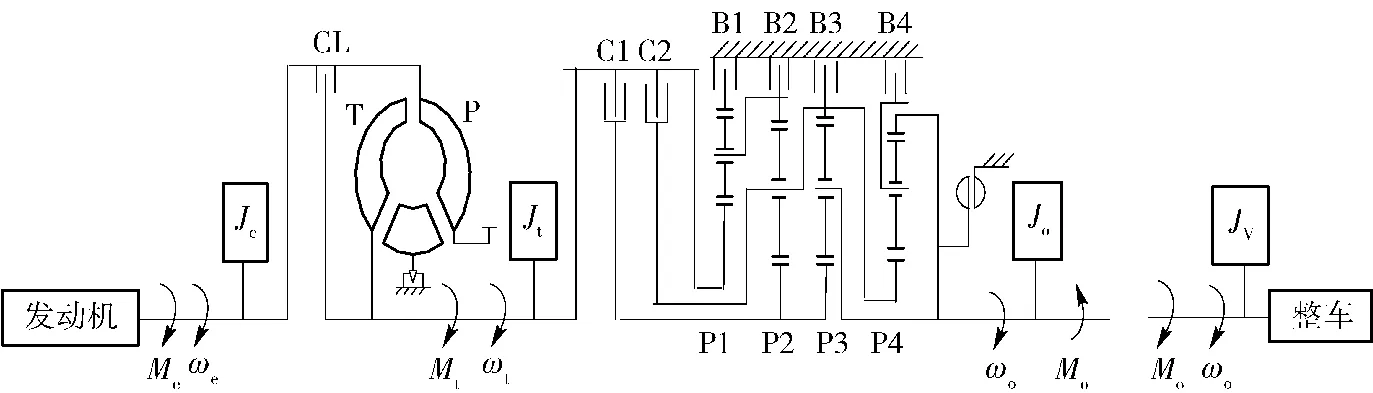
图1 HD4070PR自动变速器2挡升3挡动力学模型Fig.1 Dynamic model of 2nd gear to 3rd gear up-shift for HD4070PR transmission
以涡轮-变速器为隔离体建立方程。
通常的换挡过程分析是将其分为原挡、原挡转矩相、惯性相、新挡等4个阶段[2-6],并分别通过建立各阶段不同条件下各元件的运动微分方程来描述换挡过程。在仿真研究与换挡过程的控制中,该方法不能方便、准确地描述车辆的动态换挡过程[7-8]。本文利用拉格朗日方程,以HD4070PR变速器2挡、3挡之间换挡过程的动力学模型为例,建立反映行星齿轮变速器换挡过程的力学输入与输出之间的动态响应关系的动力学方程。
由单行星排的运动方程可以推导出2挡升3挡过程中有
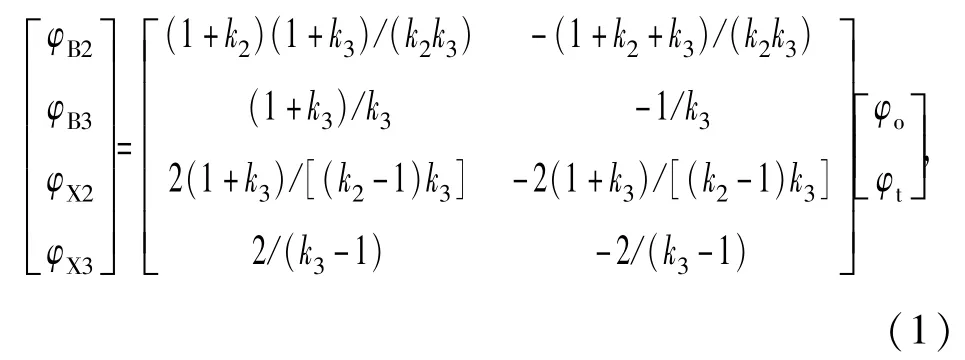
式中:φB2、φB3分别为P2行星排和P3行星排齿圈的转角;φX2、φX3分别为P2行星排和P3行星排行星齿轮的转角;φt、φo分别为涡轮轴转角和输出轴转角;k2、k3分别为P2行星排和P3行星排的结构参数。
由(1)式可知,行星排齿圈转速、行星齿轮转速可以分别用变速器输入轴和输出轴转速表示。则有
1)系统动能
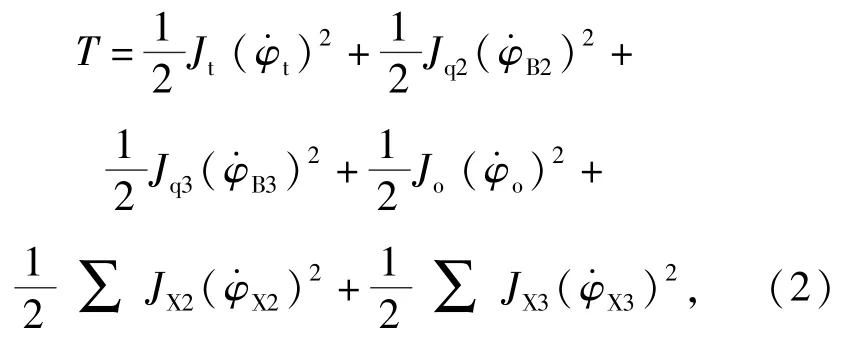
式中:Jt为与输入轴相联的转动惯量;Jo为输出轴转动惯量(包括与之相联的行星排元件的转动惯量);Jq2为P2行星排齿圈及P1行星排行星架转动惯量;Jq3为P3行星排齿圈和P2行星排行星架转动惯量;∑JX2为P2行星排行星齿轮总转动惯量;∑JX3为P3行星排行星齿轮总转动惯量。
2)计算广义力
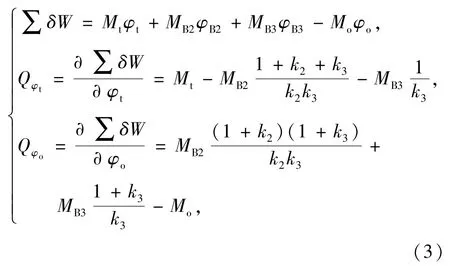
式中:∑δW为系统总虚功;Qφt为输入广义力;Qφo为输出广义力;MB2为制动器B2制动力矩;MB3为制动器B3制动力矩。
3)动力学方程
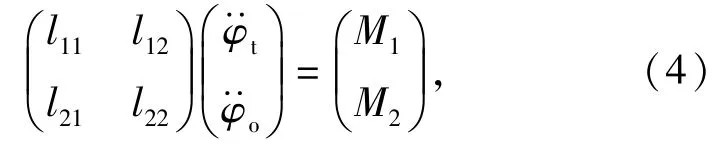
式中:
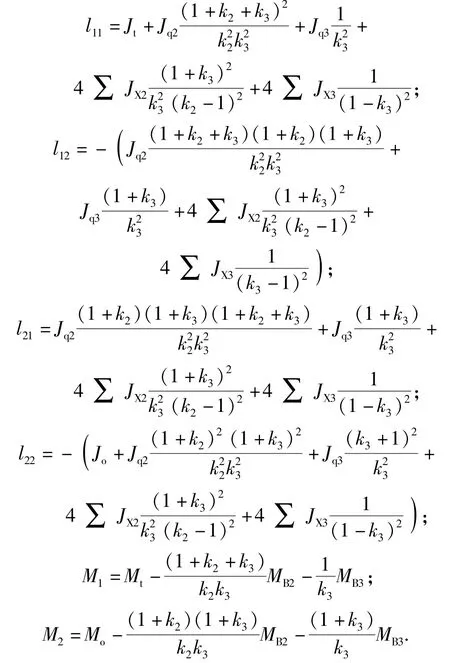
(4)式反映了换挡过程中变速器各运动件的动态响应关系,适用于换挡过程的分析。
2 两换挡执行元件充放油交替方法分析
HD4070PR自动变速器为3自由度变速器,在换挡过程其中一个换挡执行元件处于结合状态不变,只需分离一个执行元件和接合一个执行元件。若换挡过程两个换挡执行元件交替工作时序不当会造成动力中断或接合重叠过多,会引起功率损失或换挡冲击及加剧换挡执行元件磨损。为了获得较理想的充放油交替过程,有必要对升挡过程和降挡过程中行星排各元件的运动关系和转矩关系进行分析,以确定换挡执行元件充放油的理想交替方法,为换挡过程控制提供依据。
2.1升挡过程两换挡执行元件充放油交替方法分析
在2挡升3挡过程中,B3制动器放油,B2制动器充油。为了方便分析,将变速器2挡升3挡的传动简图进行进一步简化,如图2所示。
2挡升3挡开始后,B3制动器放油,B2制动器开始充油,由图2可知P2行星排齿圈逆时针旋转(从左向右看),因此P2行星排齿圈受到B2制动器的制动力矩MB2为顺时针。同样可分析出P3行星排齿圈所受B3的制动力矩MB3在换挡开始时也为顺时针。这就说明在换挡初期由两个制动器共同提供摩擦力驱动车辆。还可以分析出MB3会随着MB2的增加而自然减小(特别注意MB3仍为静摩擦力,其大小由外力而非油压决定),直到MB3减小到0(B3的最大静摩擦可能不为0),此时B2仍为滑摩状态,这一阶段没有传动比的变化,只有转矩的重新分配,被称为转矩相。随着MB2增加及MB3减小,P3行星排齿圈开始作顺时针旋转,开始出现传动比的变化,惯性力的作用增加,开始进入惯性相,直到换挡完成。以上分析的是一个正常的工作过程,但如果两个制动器充放油不当,可能出现动力中断,或出现两制动器重叠工作过多。例如,B3制动器放油过快,而B2制动器充油又过慢,会使P3行星排的齿圈逆时针旋转而造成输出轴转矩下降,这就要求B3制动器的油压降至一个安全的值(足以驱动车辆行驶而不打滑),同时B2制动器充油(但仍然保持打滑状态),直到MB3降为0(注意此时油压可能不为0),理论上此时B3应完成放油,自然过渡到惯性相,然后对B2制动器进一步进行闭环缓冲充油控制,最终完成2挡升3挡。由(4)式可知
在转矩相,随MB2的增加,转矩在两行星排之间自动分配。而输入的转矩Mt由于传动比没有变化,可以认为变化很小,由(5)式可知

式中:C为常数。则

(7)式反映了转矩相期间MB3随MB2变化的关系(也就是说此时MB3的值由MB2决定),因此,在两制动器交替工作时,B3制动器的油压保证不使其打滑即可,只要注意B2制动器油压的适当控制,冲击度就会很小。理想情况下,在MB3减小为0时,应及时完成放油。如果B3制动器放油过快,会造成动力损失过多,如果B3制动器放油过慢(在转矩相结束时仍有油压),MB3将变为阻力矩,会造成功率损失增加或引起换挡冲击。在实际控制时因无法监测MB3的大小,因此可以通过涡轮转速的变化来判断B3制动器完全放油的时机,当检测到涡轮转速的下降,应及时控制完成放油。
在转矩相结束时,如果B3制动器仍保持很高的结合压力,而B2制动器结合又过快,将会出现严重的“挂双挡”情况,会产生很大的冲击甚至损坏变速器,要避免出现此种情况。
由(4)式可以得出
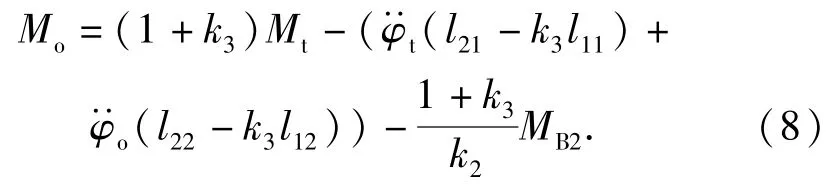
在转矩相可以认为Mt为定值,由(8)式可知,在转矩相输出轴转矩Mo是随MB2的增加而下降的(o变化较小,近似认为是常数),假设在转矩相结束时B3制动器完全分离,即MB3=0,并注意在转矩相开始时MB2=0,则由(4)式可得到,在转矩相结束时输出轴转矩下降量为

如果在转矩相结束后B3制动器处于滑摩状态而产生了阻力矩,输出轴转矩还会进一步下降。在惯性相开始时如果没有完成放油,则MB3<0,随着B3的快速放油,由(4)式可知输出轴转矩Mo会有一个快速的上升,当MB3=0时有

由(10)式可知,在惯性相输出轴转矩会随MB2的增加而增加。由(4)式可得出在惯性相有

以上升挡过程的分析可表示为图3,图中nt表示涡轮转速,pB2和pB3分别表示B2和B3制动器的油压。
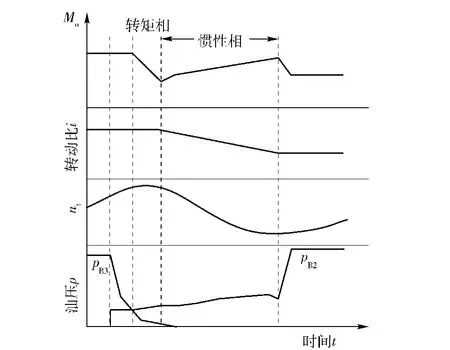
图3 升挡过程中各参数变化图Fig.3 The variation of parameters during upshift
2.2降挡过程两换挡执行元件充放油交替方法分析
换挡过程按变速器输入转矩大小可分为动力换挡和非动力换挡两种。动力换挡就是发动机处于正常的驱动车辆的工况,变速器有较大的转矩输入。非动力换挡一般指在松开加速踏板,车速快速下降,这时发动机几乎没有动力输出,变速器输入转矩很小。由(4)式得

由图2分析可知,3挡时B3制动器从动部分顺时针旋转,在降挡开始时若B3制动器充油,则MB3为负值(逆时针),而完成降挡后MB3变为正值(顺时针),也就是说MB3有由负变正的过程。再由(12)式可知,当MB2减小和MB3绝对值由0增加时,不论如何控制,输出轴转矩Mo都会降得很低(只有部分惯性力矩),即总会发生动力中断,因此无法实现通过B2制动器与B3制动器的动力搭接来防止动力中断。只能先将B2制动器快速放油解除动力传递,紧接着再通过B3制动器的充油缓冲来恢复动力完成降挡。通过合理的控制可使动力降挡过程的动力中断时间达到尽可能小。图4为动力驱动工况降挡过程中各参数变化图。

图4 动力驱动工况降挡过程中各参数变化图Fig.4 The variation of parameters during downshift under the power driving condition
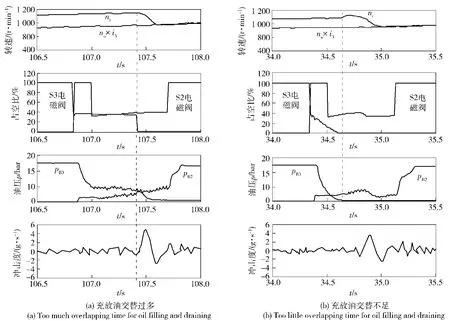
图5 升挡过程两换挡执行元件充放油交替不当试验曲线Fig.5 Test curves for improper timing method of two shifting actuators filling and draining hydraulic oil during shifting
3 试验研究
针对以上分析的升降挡过程的两换挡执行元件充放油的交替方法,进行了实车试验验证,图5为升挡过程两换挡执行元件充放油交替不当试验曲线。图中no表示输出轴转速,i3代表3挡传动比,S2表示控制B2制动器的电磁阀,S3表示控制B3制动器的电磁阀。图5(a)为一组充放油交替(重叠)时间过多的试验曲线,试验中有意使放油元件(制动器B3)保持较高的压力且放油速度较慢,充油元件(制动器B2)压力等斜率增长,随着压力的增长,制动器B2传递的转矩不断增加,此时转矩在B2和B3之间进行分配。由前面的理论分析可知,B3传递的转矩会随着B2传递的转矩的增加而自然减小,其大小由外力而非油压决定,这一点从图5(a)中可以看出,在转矩相阶段,随着B2制动器压力的增长涡轮转速几乎不变且冲击度一直保持较小,这说明B3制动器传递的转矩随着B2制动器压力的变化而变化,证明了理论分析的正确性。当检测到涡轮转速下降即进入惯性相之后,由于此时B3制动器油压较高来不及降低到0,由前面的理论分析可知其摩擦转矩会变成了较大的阻力矩,使输出轴转矩下降较多,随着B3制动器的快速放油输出轴会产生较大的转矩波动,从而会产生较大的换挡冲击。图5(b)为一组充放油交替时间不足的试验曲线,由图可知由于B3制动器放油过快出现了动力中断,同时会造成后面的控制难度加大,易产生换挡冲击。因此理想的放油规律是在保证不打滑的前提条件下油压应快速降低,在惯性相开始时变为0.而理想的充油规律是首先通过快充油迅速消除离合器间隙,在相对较短的时间内完成转矩相的控制,要注意油压增长不能过快,否则易产生换挡冲击,通过闭环油压缓冲控制完成换挡过程控制。要注意换挡元件完成接合瞬间容易产生冲击,这是因为由动摩擦转成静摩擦的过程中,如果油压过高会产生较大的转矩变化,因此在完成接合前应适当将油压调低。
图6为升降挡过程两换挡执行元件充放油交替合适的试验曲线。图6(a)为2挡升3挡曲线图,从A到B段为B2制动器的快充油时间(克服离合器间隙),同时B3制动器快速放油到一个安全的压力(不打滑)。从B到C段,B2制动器油压缓慢增加直到检测到涡轮转速下降,同时B3制动器回油完全打开。从C到D段,对B2制动器油压进行闭环控制直到升挡完成。图6(b)为3挡降2挡曲线图。B3制动器快充油期间B2制动器完成解除制动(电磁阀占空比分段降为0,以尽量减少动力中断),之后对B3制动器进行闭环控制,直到降挡完成。试验过程换挡平稳无冲击,主观评价良好,说明了理论分析的正确性。
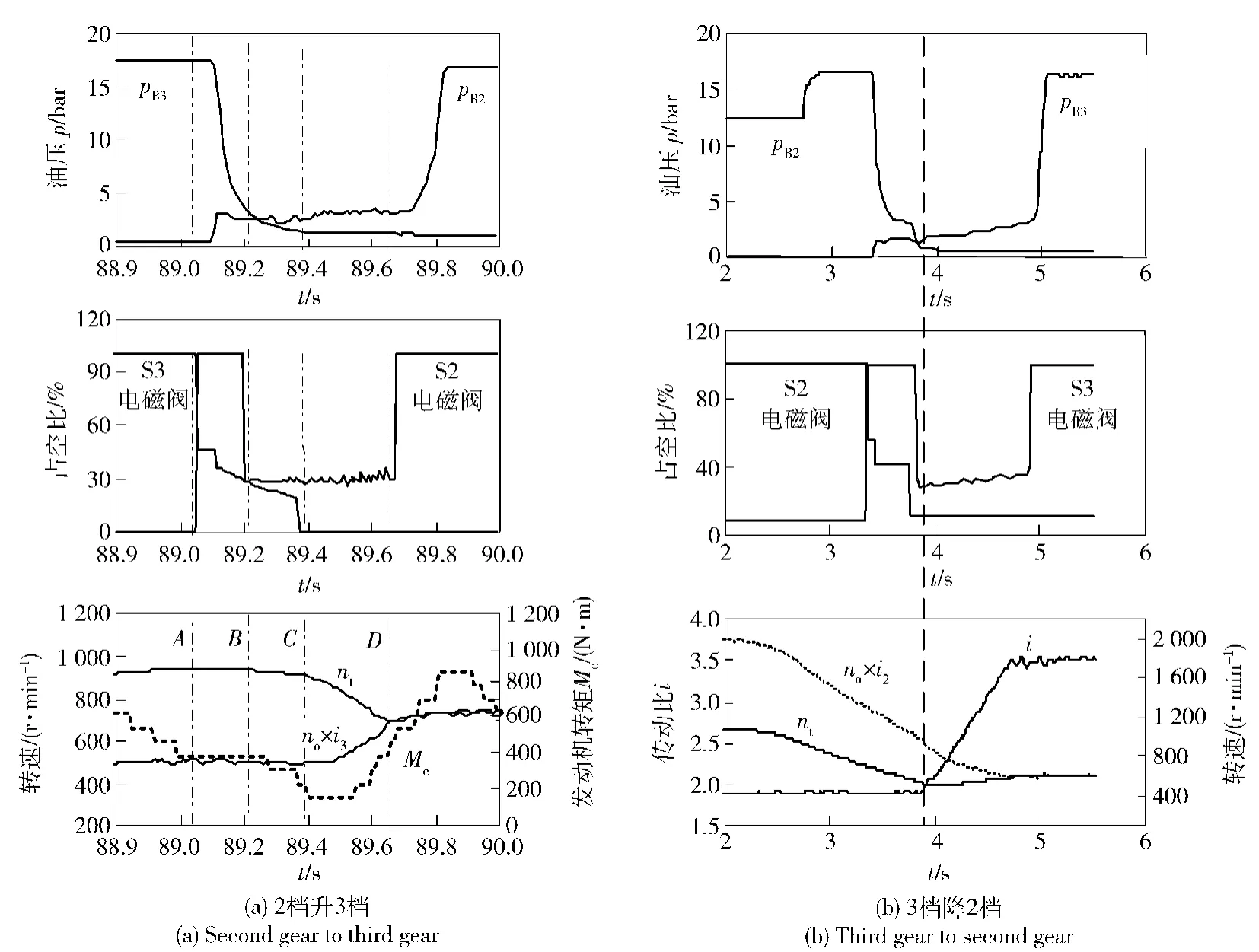
图6 升降挡过程两换挡执行元件充放油交替合适的试验曲线Fig.6 Test curves for proper timing method of two shifting actuators filling and draining hydraulic oil during shifting
4 结论
本文针对3自由度大功率液力机械自动变速器(HD4070PR自动变速器),利用拉格朗日方程建立了换挡过程的动力学方程,通过所建立的方程分析了升挡和降挡过程中两个换挡执行元件充放油交替的理想方法,得到以下结论:
对于升挡过程,放油执行元件要保证在转矩相不打滑,在转矩相结束时要完全解除制动,充油执行元件在转矩相注意油压不能增长过快,否则会造成输出转矩下降过多过快造成换挡冲击,在惯性相注意油压缓冲,结束换挡时注意适当调低油压以减少冲击。
2)对于降挡过程不可避免动力中断,只是尽可能地降低动力损失,降挡控制时充油执行元件快充油的同时放油元件放油,在充油执行元件快充油完成时放油元件要完全解除制动,也就是无法通过两换挡执行元件的动力搭接来防止动力中断。
以上结论的正确性已通过实车试验验证。
(
)
[1]张涛,陶刚,陈慧岩.电控自动变速器升挡转矩相控制策略[J].汽车工程,2013,35(2):173-178. ZHANG Tao,TAO Gang,CHEN Hui-yan.Control strategy for the torque phase in up-shift process of an electrically-controlled automatic transmission[J].Automotive Engineering,2013,35(2):173-178.(in Chinese)
[2]Zhang Tao,Tao Gang,Chen Hui-yan.Research on fill phase control strategy of shifting clutch[C]∥IEEE International Conference on Vehicular Electronics and Safety(ICVES).Beijing,China: IEEE,2011:34-38.
[3]Gao Bing-zhao.Clutch slip control of automatic transmission using backstepping technique[C]∥ICROS-SICE International Joint Conference.Fukuoka:IEEE,2009:3015-3019.
[4]Sarawoot Watechagit M S.Modeling and estimation for stepped automatic transmission with clutch-to-clutch shift technology[D]. Ohio:The Ohio State University,2004.
[5]Yasushi Narita.Improving automatic transmission shift quality by feedback control with a turbine speed sensor,SAE Paper No.911938[R].US:SAE,1991.
[6]Watechagit S,Srinivasan K.Implementation of on-line clutch pressure estimation for stepped automatic transmissions[C]∥American Control Conference.Portland,US:AACC,2005:1607-1612.
[7]张勇,许纯新,宋健,等.行星齿轮变速箱换挡过程的建模与仿真[J].吉林大学学报:工学版,2002,32(1):24-27. ZHANG Yong,XU Chun-xin,SONG Jian,et al.Modeling and simulation of shifting process of the planetary gearbox[J].Journal of Jilin University:Engineering and Technology Edition,2002,32(1):24-27.(in Chinese)
[8]程钢,刘维平.行星变速箱换挡过程动态仿真研究[J].装甲兵工程学院学报,2002,16(3):29-33. CHENG Gang,LIU Wei-ping.Study on simulating the gear-shifting process of the planetary gearbox[J].Journal of Academy of Armored Force Engineering,2002,16(3):29-33.(in Chinese)
Research on Timing Method of Two Shifting Actuators Filling and Draining Hydraulic Oil During Shifting
LI Chun-fu1,CHEN Hui-yan2
(1.Transportation college,Inner Mongolia University,Hohhot 010070,Inner Mongolia,China;2.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China)
The shifting process of automatic transmission is an alternating process of two actuators filling and draining the hydraulic oil.The improper oil filling and draining of two shifting actuators may cause power interruption or too much overlap,power lose,impact of shifting and aggravated wear of shift actuator.Lagrange equation is used to establish the dynamic equation of the shifting process by taking Allison automatic transmission(HD4070PR)as the study subject.The timing method of two shifting actuators filling and draining hydraulic oil during shifting process is analyzed on the basis of the equation,and verified by real vehicle test.The research results show that,for the upshifting process,the power shifting can be realized,and the impact of shifting can be reduced through the rational power lap;and for the downshift process,since the emergence of power interruption is inevitable,only the loss of the power should be reduced as far as possible.
control science and technology;hydraulic mechanical automatic transmission;shifting actuator;timing method
U463.212+.2
A
1000-1093(2015)01-0012-07
10.3969/j.issn.1000-1093.2015.01.002
2014-02-11
国家高技术研究发展计划项目(2012AA111713);内蒙古自治区高等学校科学研究项目(NJZY12007)
李春芾(1974—),男,副教授。E-mail:jtlcf@imu.edu.cn;陈慧岩(1961—),男,教授,博士生导师。E-mail:Chen_h_y@263.net