平交路口交通信号控制仿真器的开发
2015-11-09王晓红李国瑞
王晓红++李国瑞
摘 要: 针对平交路口交通信号控制的问题设计了基于单片机的交通信号控制仿真器。仿真器的设计分系统硬件设计和软件设计。硬件设计中采用STC89C55单片机为控制器,红外光电对管用于车辆检测模块,通过移位寄存器SN74HC595和SN74HC164实现对16×16点阵的控制并配以按键模块及电源模块;软件设计包括对各主模块及子模块流程图的设计,源代码的编写等。最终实现的模拟装置,可以利用相应按键实现对交通流自动调整、限制左转、单向等交通控制策略的模拟。设计解决了实际中耗资大、不易模拟的难题,并在最大程度上保证交通的安全和畅通。
关键词: 道路交通管理与控制; STC89C55; 仿真器; 信号灯控制
中图分类号: TN710?34 文献标识码: A 文章编号: 1004?373X(2015)21?0162?05
Development of traffic signal control simulator for level crossing
WANG Xiaohong, LI Guorui
(School of Electronic and Control Engineering, Changan University, Xian 710064, China)
Abstract: According to the control problem of traffic signal for the level crossing, a traffic signal control simulator based on microcontroller was designed. The design of the simulator is consisted of hardware design and software design. In hardware design, STC89C55 microcontroller is taken as the controller, and the infrared photoelectric tube is used as the vehicle detection module. The control of 16×16 dot matrix is realized by the shifting register SN74HC595 and SN74HC164, and the key module and power module are matched. The software design includes the designs of each main module and sub modules inflow charts, and the compiling of source code. The implemented simulator can simulate the automatic adjustment, left?turning limitation, one?way passing, and other traffic control strategies of the traffic flow by the corresponding keys. The design can solve the problems of large cost and difficult to simulate in practical, and ensure the safe and unobstructed traffic at the most extent.
Keywords: road traffic management and control; STC89C55; simulator; signal light control
0 引 言
近年来,随着政策目标的日益复杂以及交通需求的不断增长,城市交通控制在不断演变。城市交通控制系统是涵盖城市交通数据检测、城市交通信号灯控制以及城市交通疏导的综合管理系统,是城市现代化进程中的重要组成部分[1]。实践证明,智能交通系统(Intelligent Traffic System,ITS)能够有效地提高系统效率、减少交通拥挤、达到节能减排的效果[2?3]。交通信号机作为系统中控制算法的载体,既是交通管理、交通控制和数据挖掘的平台,也是最有执行力的执行单元[4]。
早期智能交通控制研究主要采用模糊逻辑方法,并取得了较好的成效[5?7]。然而简单的模糊处理会降低控制的精度从而导致规则难以总结,采用试凑法获取的量化因子、比例因子等参数则包含了过多的人为因素,反复的测试也造成了设计过程缺乏系统性。后期则主要为基于遗传算法的研究[8],而这些方法可能造成过早收敛和进化速度较慢等现象。
在此基础上,本文设计了一种基于单片机的平面交叉路口交通信号控制策略模拟装置,系统硬件及软件设计均采用模块化思想,既方便硬件维修,也方便软件调试[9]。该装置可通过按键选择演示交叉路口的交通信号控制策略,也可以通过修改程序来调整交通流的行进速度和通行时间。
1 系统硬件设计与分析
目前交通信号控制的设计方案较多,例如,依靠工业控制机实现交通信号灯控制器的设计,使用可编程控制器(Programmable Logic Controller,PLC)实现控制系统的设计以及采用FPGA半定制电路实现系统设计等[10?11]。但采用第一种方式会随时间的推移产生大量的系统垃圾,导致系统运行速度及可靠性的降低;PLC则由于体系结构封闭,设计较为死板;FPGA虽然灵活性高,但成本较高。而单片机具有设计简单、体积较小且成本较低的优势,又由于STC89C55单片机处理速度、ROM和RAM等片上资源均能满足设计要求;本文提出了利用单片机控制技术并采用软硬件结合的方式,对交叉路口拥挤的状况进行了多种情况下交通信号灯控制系统的设计[12]。
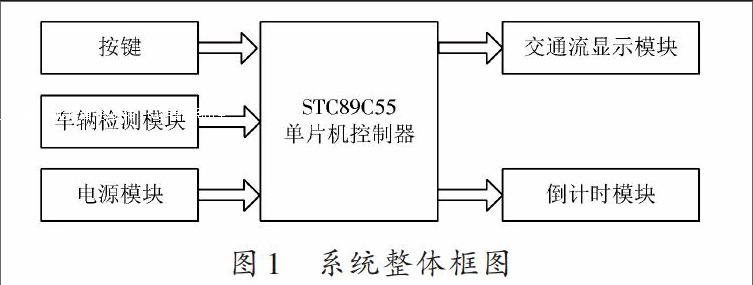
实验装置以STC89C55 单片机为控制器,由按键模块、车辆检测模块、电源模块、交通流显示模块以及倒计时模块组成。系统采用16×16 LED点阵模拟平面交叉路口的交通流情况,比传统的红绿两色LED灯交替显示更加形象、新颖。系统整体框图如图1所示,各模块功能如下:
(1) 交通流显示模块实现对车流情况以及车流控制模式的显示;
(2) 倒计时模块实现对车流通行时间的倒计时;
(3) 按键模块用于实现单片机的复位、启动系统工作并可以进行不同控制模式间的切换;
(4) 车辆检测模块用来检测车流的大小,将检测信号输入单片机控制器;
(5) 电源模块可提供系统所需的5 V直流电,为整个系统提供电能。
图1 系统整体框图
1.1 车辆检测模块
本设计主要模拟车流量的检测。假设环境为车辆在等待信号灯时都处于停止状态,进而遮挡道路一侧射向另一侧的光线。因此,可在距离路口特定距离的位置设置激光车流检测器,进而对等待通行的车辆数量进行估算并对交通灯的时间进行自动控制,从而实现合理配时,在一定程度上解决拥堵的状况。
本设计采用5 mm红外光电对管作为车流检测器,包括发射管和接收管,其为光敏半导体器件,近红外波段输出波长为450~1 050 nm,射程在7 m以内,激励方式为电激励式,完全符合本设计要求。
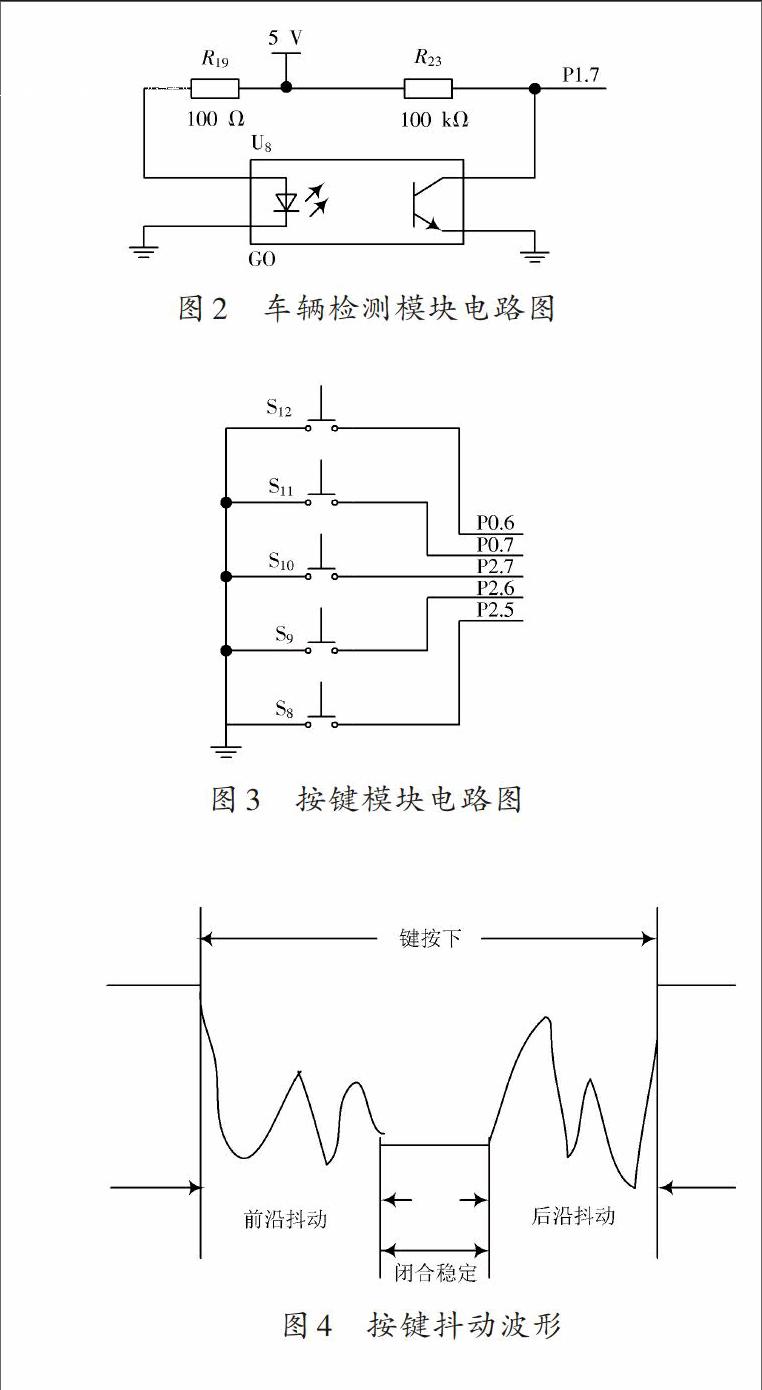
车辆检测模块电路设计如图2所示。电路中驱动电压选用5 V,发光管选用100 Ω的驱动电阻。当接收管能接收到发射管发出的红外线时,呈现导通状态,两端电阻为50~70 Ω;当接收管接收不到发射管发出的红外线时,呈现高阻态,接收管不导通,因此给接收管串联100 kΩ电阻。当接收管导通时其两端电压接近0 V,当接收管截止时,其两端电压接近5 V,所以把接收管两端电压选为单片机输入信号。实验中需要4个光电对管,分别输入单片机的P1.2,P1.5~P1.7口。
1.2 按键模块
本文采用控制系统中造价较低且最常见的触点式开关按键,按键电路如图3所示。
(1) 按键的识别。按键的一端与电源地相连,另一端接入单片机,按键分别接入单片机的P0.6~P0.7和P2.5~P2.7口。当按键被按下时,向单片机相应端口输入低电平信号,单片机检测到这一信号,实现相应的控制。
(2) 按键的防抖措施通常使用机械式按键。在按下或释放时,由于机械弹性作用的影响,通常伴随有一定时间的触点机械抖动,然后其触点才稳定下来。抖动过程如图4所示,抖动时间的长短与开关的机械特性有关,一般为5~10 ms。
图4 按键抖动波形
触点抖动期间检测按键的通与断状态,可能导致判断出错;即按键一次按下或释放被错误地认为是多次操作。为了克服按键触点机械抖动所致的检测误判,必须采取去抖动措施。在键数较少时,可采用硬件去抖,而当按键数较多时,采用软件去抖。本设计考虑到安装空间及性价比,按键也较多,故采用软件防抖,并且在按键按下后设置了按键等待释放程序,可保证按键按下的有效性和准确性。
软件上采取的措施:在检测到有按键按下时,执行一个10 ms左右(具体时间应视所使用的按键进行调整)的延时程序后,再确认该键电平是否仍保持闭合状态电平,若仍保持闭合状态电平,则确认该键处于闭合状态;同理,在检测到该键释放后,也应采用相同的步骤进行确认,从而可消除抖动的影响。
1.3 电源模块
电路中所有模块使用5 V电压,因此系统设定5 V为额定电压。本文采用8 V可充电蓄电池,经过稳压器件稳压得到5 V电压。稳压器件选用已广泛使用的三端集成稳压器LT1084,其具有体积小、安装方便、工作可靠、额定电流大的优点。
1.4 交通流显示模块
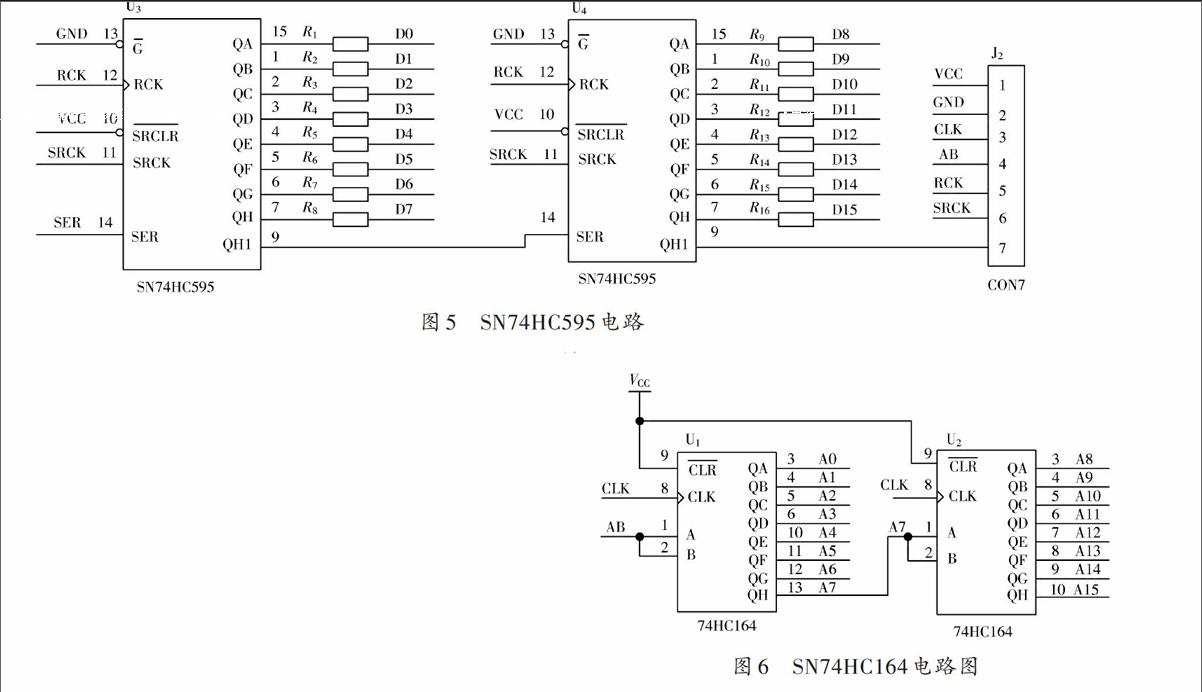
本系统的点阵电路由4个集成的8×8 LED点阵组成,通过移位寄存器SN74HC595和SN74HC164分别控制点阵两端,其中由三极管电路将驱动信号放大,实现对16×16点阵的控制[13]。
1.4.1 SN74HC595电路设计
74HC595为并行输出,包含8位串行输入并向一个8位D型存储寄存器提供数据。其存储寄存器具备三态输出。移位寄存器和存储寄存器分别具有独立的时钟。该移位寄存器带有最高优先级的直接清零端(SRCLR)、串行输入端(SER)和用于级联的串行输出端。此外,74HC595芯片具有速度快、功耗小、操作简单的特点,可以很方便地应用于单片机接口进行驱动LED的操作,高速移位时钟频率[fmax>]25 MHz。
如图5所示,由于点阵输出端有16个接口,而一个SN74HC595芯片只有8个位串行接口,因此需将2个SN74HC595芯片级联,并在输出端接驱动电阻,以此满足驱动要求。
1.4.2 SN74HC164电路设计
74HC164是高速硅门CMOS器件,与低功耗肖特基型TTL器件的引脚兼容。74HC164是8位边沿触发式移位寄存器,串行输入数据,然后并行输出。数据通过两个输入端(DSA或DSB)之一串行输入;任一输入端可以用作高电平使能端,控制另一输入端的数据输入。主复位(MR)输入端上的一个低电平使其他所有输入端都无效,同时非同步地清除寄存器,强制所有的输出为低电平。将通用芯片74HC164应用其显示驱动电路,既可以获得相同显示效果,又可以降低成本,提高系统可靠性并且芯片的安装方法非常灵活,可以减少显示面板连接导线的数量,提高系统的可靠性,在按键和显示驱动电路中得到了广泛应用。
如图6所示,由于点阵输入端有16个接口,而1个SN74HC164芯片只有8个位串行接口,所以需要将2个SN74HC164芯片级联,由于SN74HC164输出端口的驱动能力有限,无法驱动点阵正常动作,所以需通过接三级管放大电路对其信号进行放大,这样才能满足驱动要求。
1.4.3 三极管S8550电路设计
图7所示为8个相同的三极管放大电路,三极管基极接SN74HC164电路的输出,将放大后的信号输入点阵。
图6 SN74HC164电路图
1.5 倒计时模块
本设计中的倒计时在100 s以内,因此本系统中选用双端7位数码管[14]。电路图如图8所示。该数码管为共阴极7段数码管,由单片机P3.0~P3.6输出数字,P1.4输出个位位选,P1.3输出10位位选。
2 系统软件设计与分析
软件的设计须以硬件为根据,二者充分的兼容协调才可以实现系统的稳定可靠运行。为方便程序的调试及后期的维护升级,本系统的软件设计采用硬件模块化的思路设计,具有较强的可移植性[15]。本系统的软件模块主要包含:车流的自动调整模块及东西直走模块等。这些程序模块相对独立,均可相互之间调用、嵌套。软件设计的总流程图及各子流程模块如图9所示。
图7 三极管S8550电路图
图8 倒计时模块电路图
2.1 系统主流程
系统上电复位后,按下开始按键,程序开始后初始化程序,之后向点阵输出本设计的题目“平交路口交通信号控制仿真器的开发”,之后进入自动调整模式,点阵模块输出交通流情况,数码管显示倒计时,同时系统检测是否有开关按下,如果没有,继续执行此子程序;反之,调用按键相应的子程序。
2.2 自动配时流程
对车流情况自动调整即通过光电对管检测道路的拥堵情况,当没有发生拥堵时,按原定通行时间执行;当某一方向发生拥堵时,车辆就会挡在光电对管之间,系统监测到这一信号后会在该方向适当的增加通行时间,以缓解拥堵情况。
该子程序首先判断车流检测模块输入的信号,若光电对管被遮挡,车流检测模块输入高电平,程序执行东西方向直行50 s;反之,车流检测模块输入低电平,程序执行东西方向直行40 s。执行完毕后,判断车流检测模块输入的信号,若为高电平,执行东西方向左转25 s程序;反之,执行东西方向左转20 s程序。执行完毕后,执行南北方向的程序,过程与东西方向相同。
2.3 子系统流程
(1) 限制左转和单向模式子流程图
车流量较大时,可采用限制左转的方式,即只允许直行,以便更快地疏散车流。当某一方向车流量较大,而相反方向车流量较小时,可以采用单向模式,以此实现更加合理的调节方式。如图9所示,限制左转的子程序流程为开始后先初始化程序,之后执行东西方向直行45 s程序,接着执行南北方向直行45 s程序。单向模式的流程中,程序开始后先初始化,之后执行由东向西行驶45 s程序,接着执行由南向北行驶45 s程序。
(2) 假日子程序流程图
节假日期间道路上车流量比较大,各个方向易出现堵车的状况,而自动调整无法有效地解决这个问题。本文通过延长各方向直行的时间,相应减少左转的通行时间,达到合理通行的目的。如图9中的假日流程模块,程序开始后先初始化程序,然后东西直行45 s程序,接着执行东西左转25 s程序;接着执行南北直行45 s程序,最后执行南北左转25 s程序。
3 电路安装与调试
本装置的设计思想是以平面点阵代替交叉口的红绿灯,当某一方向通行时,这个方向的点阵就会点亮,机动车根据该信号行驶,当车辆行驶在点阵上时,车辆下方的LED灯就会被遮挡,被遮挡的LED灯就代表行驶的车辆,这样就可简单明了的表示出车流。
图10为键盘的实物图,根据以上软硬件设计最终做成的平交路口交通信号控制仿真器运行情况如图11所示。图12为各种调整模式下的运行状况。
图10 键盘 图11 交叉口系统运行实物图
图12 各模式运行情况
4 结 语
本文以当今社会智能交通的普遍发展作为背景,设计了一种基于单片机的平面交叉路口交通信号控制仿真器,并完成实物制作。该仿真器采用STC89C55作为主控CPU,4块集成的8×8 LED点阵以及双位7段数码管作为交通流显示模块,配以车辆检测模块、按键模块、电源模块以及倒计时模块,并使用移植性较好的C语言编写软件程序,最终满足设计需求。本装置不仅实现了交通信号控制的功能,还引入车辆检测模块优化信号配置,达到了实施控制的目的。
交通信号控制仿真器可用于实际教学实验,也可在实验室中用作实际平面交叉路口的模拟仿真。正常工作是点阵显示交通流情况,可以通过按键实现不同模式的切换,也可以通过对软件的调整实现对通行时间的设置。但若使用红外遥控器代替按键键盘,并采用液晶屏幕代替点阵,则效果更加形象逼真。
参考文献
[1] XU Tiansheng, ZHANG Hongchen. The optimization and simulation of traffic signal control system [C]// Proceedings of 2014 IEEE International Conference on Information Science. Sapporo: IEEE, 2014: 554?556.
[2] MA S K, IMURA J I, HAYAKAWA T, et al. Smart driving of a vehicle using model predictive control for improving traffic flow [J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(2): 878?888.
[3] HAMILTON A, WATERSON B, CHERRETT T, et al. Evolution of urban traffic control?the policy and technical changes [J]. Urban Traffic, 2014, 1(5): 82?94.
[4] SEHGAL V K, DHOPE S, GOEL P, et al. An embedded platform for intelligent traffic control [C]// Proceedings of 2010 the 4th UKSim European Symposium on Computer Modeling and Simulation. Pisa: IEEE, 2010: 541?545.
[5] GAO J X, LI J G, ZHAO X H, et al. Multiphase fuzzy control under hybrid traffic flow of single intersection [C]// Proceedings of 2003 IEEE Intelligent Transportation System. [S.l.]: IEEE, 2003: 1329?1333.
[6] ASKERZADE I N, MAHMOOD M. Control the extension time of traffic light in single junction by using fuzzy logic [J]. International Journal of Electrical & Computer Sciences, 2010, 10(2): 48?55.
[7] KHAN B, LAI N S. An advanced fuzzy logic based traffic controller [J]. International Journal of Innovation in the Digital Economy, 2014, 5(1): 31?40.
[8] FAZLI S, MOHAMMADIA S, RAHMANI M. Neural network based vehicle classification for intelligent traffic control [J]. International Journal of Software Engineering & Applications, 2012, 3(3): 17?22.
[9] 李全利.单片机原理及接口技术[M].北京:高等教育出版社,2009.
[10] LIU Y, CHEN X F. Design of traffic lights controlling system based on PLC and configuration technology [C]// Proceedings of 2009 International Conference on Multimedia Information Networking and Security. Hubei, China: IEEE, 2009: 561?563.
[11] SABRI M F M, HUSIN M H, ABIDIN W A, et al. Design of FPGA?based traffic light controller system [C]// Proceedings of 2011 IEEE International Conference on Computer Science and Automation Engineering. Shanghai, China: IEEE, 2011: 114?118.
[12] 裴玉龙,张亚平.道路交通系统仿真[M].北京:人民交通出版社,2004.
[13] 林涛.模拟电子技术基础[M].重庆:重庆大学出版社,2003.
[14] 林涛.数字电子技术基础[M].北京:清华大学出版社,2006.
[15] AUGUSTUS K, CONSTANTINE D, KOLEN J F, et al. On the combination of hardware and software concurrency extraction methods [C]// Proceedings of 1987 the 20th Annual Workshop on Microprogramming. [S.l.] : IEEE, 1987: 133?141.
