基于SVM的下肢运动表面肌电信号的特征提取与辨识分析
2015-11-07赵慧龙张向刚秦开宇电子科技大学航空航天学院人机耦合技术实验室成都611731
张 羿,赵慧龙,张向刚,秦开宇(电子科技大学航空航天学院人机耦合技术实验室,成都611731)
基于SVM的下肢运动表面肌电信号的特征提取与辨识分析
张羿,赵慧龙,张向刚*,秦开宇
(电子科技大学航空航天学院人机耦合技术实验室,成都611731)
为了对蹲、站、行走支撑与行走摆动四类人体典型运动行为进行有效的分类辨识,三位健康且未经过专业训练的受试者被邀请参加运动实验,实验对人体下肢股内侧肌的表面肌电信号(Electromyography,EMG)进行实时采集和记录。通过时域、频域、时频域方法,对特征值进行提取,发现下肢股内侧肌的表面肌电信号在下蹲、起立、行走支撑期和行走摆动期四类运动方式下的动态特征具有明显的差异性。基于上述结论,介绍了一种基于支持向量机(Support Vector Machine,SVM)的误识别样本二次分类方法,对上述典型运动类型进行了辨识分析。与传统单次样本识别结果相比,本文所发展的基于SVM特征值分析的误识别样本二次分类方法能较好地提高识别效果,样本辨识结果显示时域和时频域的识别效果最好,时频域方法抗外界干扰能力较好。
下肢;表面肌电信号;特征提取;支持向量机;时频域
1 引言
近些年,宇航员地外生存的健康保障课题已被认定为最具挑战的最高优先级技术[1]。从近地走向深空,是载人航天的内在驱动力。我国载人航天在完成“三步走”战略目标之后,探索的脚步将逐步迈向地球高轨、月球、近地小行星、火星等目的地[2]。然而,载人航天实践表明,中长期空间站驻留,将会导致宇航员心血管功能障碍、骨质丢失、肌肉萎缩、免疫功能下降、空间运动病等生理效应[3]。人体肌肉神经系统的反应特征能有效地评估上述生理效应的变化规律,安全运动锻炼能提高人体健康水平和身体素质。因此,提供一种安全、可靠且有效的个性化运动方案可以帮助宇航员提高心血管系统健康,预防功能退化性疾病,如骨质疏松、肌肉萎缩等[4]。对表面肌电信号(Surface Electromyogram,SEMG)的研究能够帮助分析肌肉的劳损程度,预测肢体运动信息,评估宇航员在地外生活中日常运动对肌肉活动能力的影响。表面肌电信号是通过电极引导、放大而从肌肉表面记录下来的神经肌肉系统活动时的非平稳一维时间序列生物电信号,它能够反映肌肉强度和人的运动特征[5]。人的运动意图通常通过神经兴奋刺激肌肉细胞的收缩与舒张实现[1,2,6],由于不同的肢体运动中肌肉收缩的模式不同,导致相应的表面肌电信号的特征也具有差异,在人的意图控制下产生的表面肌电信号能较好地反映出肢体运动或动作特征,评估人体运动意图[1,3]。
传统的基于表面肌电信号的人体运动特征分析方法往往仅针对时域或频域信息对人体不同的运动状态进行特征分析与提取[7-9]。这些方法都将肌电信号视为平稳或者短时平稳信号进行处理,然而实际上肌电信号应为非平稳信号[1,5,6]。为了有效地分析SEMG的非平稳性,小波变换被应用到了SEMG的特征提取[10,11]。它是将时域和频域分析相结合,对表面肌电信号的时间和频率所包含的信息研究。由于运动刺激产生的表面肌电信号的非平稳随机性、时变和易干扰等特性,小波变换也很难对由运动产生的SEMG特征提取进行一般性概括[6,12]。
本文首先对人体下肢下蹲、起立、行走摆动和行走支撑四个典型基本动作的肌电(EMG)信号进行了实验调查。为了有效降低跨个体差异性(Inter subject variability),每位受试者对每个动作试验进行3次试验,同时每次试验也对该动作重复20次。而考虑到同个体差异性(Intra subject variability),三位健康且未经过专业运动训练的受试者(年龄范围在20~30岁)被邀请参加试验,在试验前1小时仅被允许摄入适量的食物。三位受试者分别进行了下蹲、起立、行走摆动和行走支撑四类动作的实验,单通道肌电采集系统(如图1所示)被采用来获取运动时股内侧肌的表面肌电信息。其次,为了揭示上述四类基本动作的可分类性程度,时域、频域和时-频域三类特征提取方法被采用,支持向量机(Support Vector Machine,SVM)分别对上述四个动作的时域、频域和时-频域特征进行分类验证与对比分析,同时也提出了一种基于支持向量机(SVM)特征值分析的误识别样本二次分类方法(Double-round Feature Recognition and Filtering,DFRF),较好地改善了特征的可辨识率(包括时域、频域和时-频域特征)。
2 实验介绍
本实验在电子科技大学航空航天学院人机耦合实验室完成。为观察不同受试者在下肢运动时的股内侧肌活动反应,三名受试者被邀请,每位受试者设定代号为A~C,受试者基本资料如表1所示。
表1 受试者基本资料Table 1 Data of the sub jects
实验所采用的SEMG传感器包括信号的检测、信号放大、信号滤波、A/D转换,通过串口输入到PC机上。如图1所示:
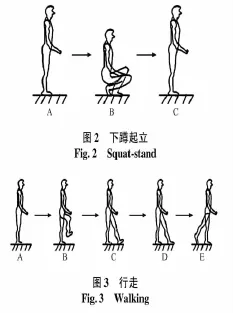
测试对象为正常人群,且该被测试对象身体健康、体态正常、身体各关节运动状况良好,无任何关节运动障碍疾病。同时,为了减小同一对象和主体间的差异性,在进行SEMG采集前24 h内,被测试者须避免任何形式的剧烈运动,并保证下肢肌肉的舒适感。实验要采集下肢的下蹲、起立、行走摆动期和行走支撑期四种动作的数据,如图2和图3所示,其中图2中的A—B为下蹲,B—C为起立,图3中的A—C为摆动期、C—E为支撑期。由于四种动作与膝关节密切相关,控制膝盖弯曲等动作,因此本文针对股内侧肌的肌肉运动反应特征进行采集与记录[13]。

图1 肌电信号传感器Fig.1 Sensor of the SEMG signal
与其他生物电信号一样,SEMG本身非常微弱,信噪比较低,易受周围噪声信号的干扰,尽管在电路设计中已充分考虑,但在实际SEMG采集过程中仍需采用一定的措施加以抑制:信号采集之前,用湿巾擦洗贴片位置并晾干;在粘贴电极片时,电极片的正负两端沿肌纤维的长轴方向纵向放置,并将电极片粘贴在肌腹处,用手轻轻按压,保证电极片与皮肤接触良好并牢牢固定;表面肌电电极片均为一次性粘贴,不能重复使用[13]。
数据采集过程中,受试者做有规律的运动,动作周期大约为3 s,每次采集大约1 min,对每个受试者的每个动作每次采集20次,每次采集完之后测试者要休息10min,然后再接着采集下一组,每个动作每个人采集3组,然后从中挑选出采集效果比较好的数据进行分析。
原始数据进行10阶中位值滤波以去除采集过程中由于通信错误等原因产生的奇异点,然后进行20~500 Hz带通滤波以去除低频和高频的噪音并加绝对值,最后用50阶滑动平均滤波器反复滤波10次以得到平滑的时域信号,其实验结果如图4所示(其中灰色区域为所有样本的范围,即所有样本都在灰色区域中,黑色加粗线为所有样本的平均值)。

图4 实验数据结果(左上:行走摆动,右上:行走支撑,左下:下蹲,右下:起立)Fig.4 Experiment results(upper left:sw ing phase,upper right:support phase,lower left:stand-squat transition,lower right:squatstand transition)
频域信号如图5所示,上述动作被选取任意20个样本,通过20~500 Hz的带通滤波器之后,计算出其功率谱密度,然后对20个样本求平均。

图5 频域肌电信号图Fig.5 Frequency-domain feature of EMG signals
根据上述实验结果,我们发现上述四类动作在时域中均存在较大的差别性(如图4所示),且下蹲、起立和步态这三个动作之间的幅值有比较大的差别,而步态中的摆动期和支撑期在面积上有一定差别;上述动作的功率谱在幅度上也存在差异,下蹲、起立和摆动支撑之间有较大差异,但是下蹲和起立之间差异较小,且支撑和摆动之间差异也较小(如图5所示)。
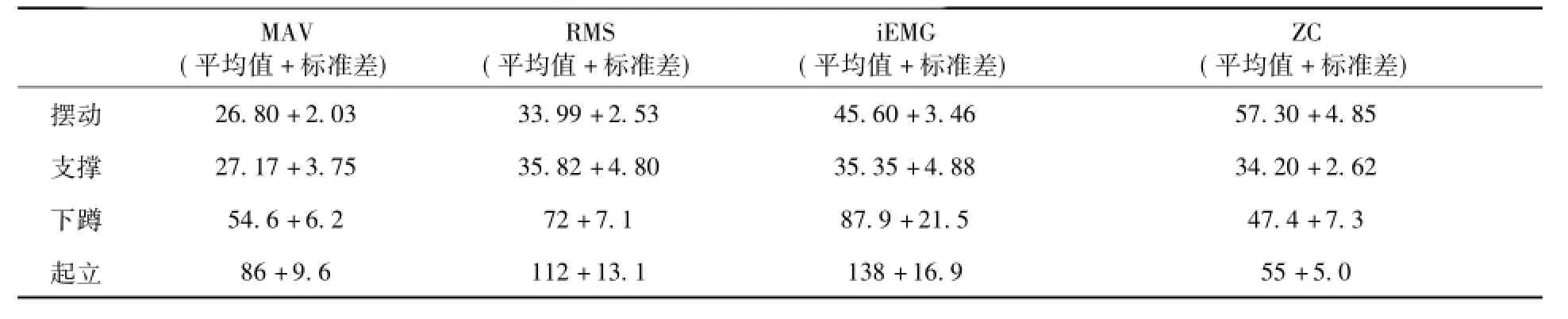
表2 时域特征均值及标准差Table 2 Average and standard deviation of time-domain features
3 特征提取及分析
本文针对实验观察结果分别进行了时域、频域和时频域三种方法的比较分析。
时域分析方法采用了平均绝对值肌电值(MAV)、均方根(RMS)、绝对值积分(iEMG)和过零点数(ZC)四种提取方法[7]。表2介绍了上述方法对动作特征的统计结果。由表2可知,在时域中下蹲、起立与支撑和摆动三者之间的MAV、RMS和iEMG差异比较大,说明这三个特征在这三者之间的类间距离很大,具有相当的可分性,而MAV的标准差小说明聚类性好;支撑摆动之间的iEMG和ZC差异比较大,且标准差小,说明它们之间的类间距很大且聚类性很好,具有很好的可分性。
对于频域分析方法,本文采用了常用的平均功率频率(MNF)、中值频率(MDF),作为表面肌电信号的频域特征值指标[14]。表3揭示了上述动作样本的MNF和MDF的标准值与偏差。由表3可知,在频域中下蹲、起立、支撑和摆动四者之间的MDF差异比较大,说明这个特征在这四者之间的类间距离很大,具有可分类性,而摆动和支撑的MDF标准差小说明摆动和支撑的聚类性也很好。
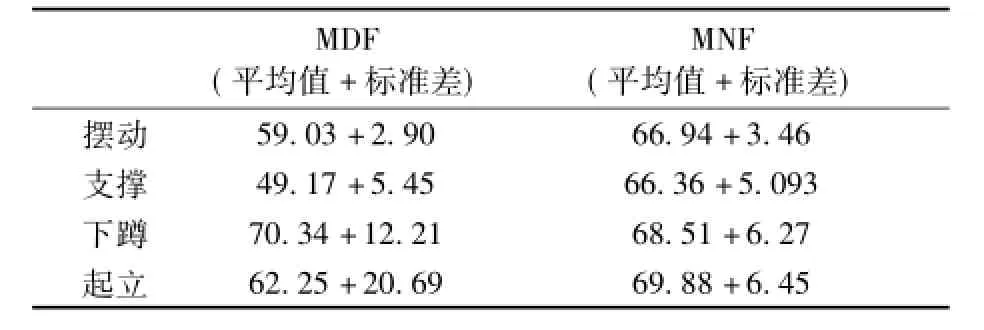
表3 频域特征均值及标准差Table 3 Average and standard deviation of frequencydomain features
最后,本文采用了基于小波变换的时频域特征提取方法,对第2节所获得的实验数据进行了分析。图6展示了本文所采用的5层小波分解方式。给定一个长度为N的信号S,离散小波分解(DWT)最多可以把信号分解成log2N个频率级。第一步分解开始于信号S,分解后分解系数由两部分组成:低频系数向量D1和高频系数向量H1,向量D1是由信号S与低通分解滤波器经过卷积运算得到的,向量H1是由信号S与高通分解滤波器经过卷积运算得到的。在下一步分解中,用同样的方法把低频系数D1分成两部分,即把上面的S用D1代替,分解后返回尺度2的低频系数D2和高频系数H2,再往下分解依此类推。最后得到一个低频系数列D5和五个高频系数列H5,H4,H3,H2,H1。基于上述分解,本文选用db3小波函数进行实验,以下是对上面6个系数列提取奇异值特征的结果。表4记录了四种动作样本的以上特征的平均值和标准差。通过观察上表可知下蹲、起立、摆动和支撑的H4的差异比较大且标准差相对不大,所以H4的奇异值可分性比较好。

表4 小波变换后各层系数的奇异值的均值及标准差Table 4 The average and standard deviation for singular values of hierarchical coefficien ts after w avelet transform
4 基于SVM的分类
设给定的训练集{(x1,y1),(x2,y2),…,(xm,ym)},其中xi∈Rn,y∈{-1,1},即xi为一个样本矢量,y表示分类的标记,也称为属性矢量。如果训练集的所有向量均能由某超平面正确划分,并且距离最近的异类向量之间的距离最大,则该超平面为最优平面,其中距离超平面最近的异类向量被称为支持向量。该超平面记为式(1)[15]:

其中,w是为最优分类面的权系数向量,b为常数,X为输入样本向量。我们定义一个样本点到超平面的间隔为:

现在对w和b归一化,即用w/‖w‖和b/‖w‖分别代替w和b,则间隔可以写作式(2):

其中,σg表示几何间隔。几何间隔与样本误分次数之间的关系可表示为式(3):

其中R=max‖xi‖,σ是样本集合到分类面的间隔。由以上可得知构造最优化超平面的问题转化为求min‖w‖,但是必须得加约束,否则几何间隔有可能为无穷大。因此,约束条件可被表示为:

引入Lagrange乘子,得到函数:

其中ai为非负Lagrange乘子。
根据最优化理论,存在唯一的最优解,最优解在该函数的极点处,如式(4)对w和b求偏导数可得式(4):

上述是线性可分的情况,如果所给的样本是线性不可分的,线性分类器的求解程序会无限循环下去。这必然使得它的应用范围大大缩小,但是它的很多优点我们不愿放弃,这就引入了核函数,它将输入空间映射到更高维的空间中。
常用的核函数包括线性核,多项式核和径向基核,分别为式(5)~(7)所示:
其中γ,r和σ均为核参数。
5 结果
5.1时域结果分析
图7为四种动作在时域中各自的特征值分布情况:其中蓝色—下蹲,红色—起立,绿色—摆动,黑色—支撑(经过统一尺度的变换)。
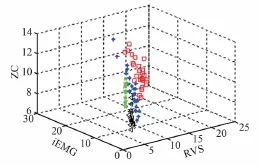
图7时域特征值分布图Fig.7 Distribution of time-domain features
图8为用SVM进行识别后的结果,红点为提前标定的类别即为实际的类别,而黑点为用SVM识别的结果,每个样本的红点和黑点互相重叠的说明识别的结果是正确的,不重叠则说明是不正确的。
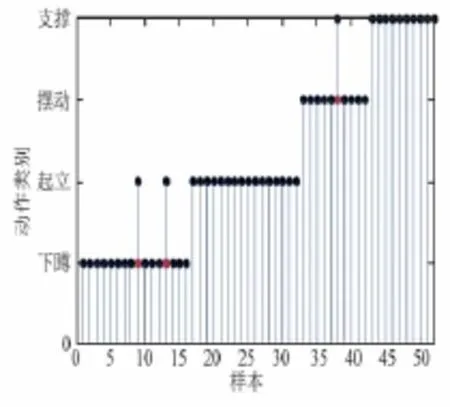
图8 时域识别结果图Fig.8 Recognition resu lts of tim e-domain features
由图8可知,下蹲动作中有两个样本识别错误,被错划分成了起立动作,而摆动样本有一个被错划分成了支撑动作。四种动作总的识别率为94.23%。此结果验证了下蹲、起立、行走摆动和行走支撑在时域中的可分类性。
5.2频域结果分析
图9为四种动作在频域中各自的特征值分布情况:其中蓝色—下蹲,红色—起立,绿色—摆动,黑色—支撑,横轴表示特征值类型,纵轴表示特征值的大小(经过统一尺度的变换)。
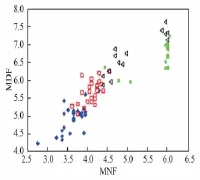
图9 频域特征值分布图Fig.9 Distribution of frequency-domain features
由图9和表3可以观察到,其频域特征不具有可分类性。图10为用SVM进行识别后的结果,其中红点为提前标定的类别即为实际的类别,而黑点为用SVM识别的结果,每个样本的红点和黑点互相重叠的说明识别的结果是正确的,不重叠则说明是错误的。
由图10可知,起立动作中有一个样本识别错误,被错划分成了下蹲动作,而摆动样本有二个被分别错划分成了支撑动作和起立动作,但是支撑中有很多被错划分成了摆动。四种动作总的识别率为78.80%。结果验证了下蹲、起立、行走摆动和行走支撑在时域中不具有可分类性。

图10频域识别结果图Fig.10 Recognition results of frequencydomain features
图11为频域特征值大小与频域特征的关系。

图11 频域特征值大小Fig.11 The am p litudes of frequency-domain features
其揭示了摆动和支撑之间的识别率很低,然而支撑(绿色)和摆动(黑色)的斜率差较大,因此可通过斜率区分支撑与摆动状态。
图12为加上斜率(slope)的特征值分布结果:

图12斜坡特征值分布图Fig.12 Distribution of slope features
图13为加上斜率后的识别结果。
与图10结果相比,二次误样本的频域识别结果(如图10和图13所示)有了很大改善,且仅一个样本被错话分成了摆动,另有两个被错划分成了起立。四种动作总的识别率为88.4%,相比加策略之前有了很大的提高。
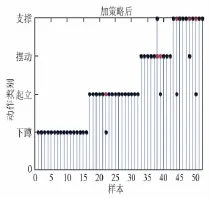
图13 二次误样本的频域识别结果图Fig.13 The recognition results of frequency-domain features
5.3时频域结果分析
图14为四种动作在频域中各自的特征值分布情况:(经过统一尺度的变换)。
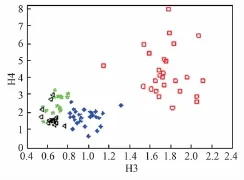
图14 时频域特征值分布图Fig.14 Distribution of time-frequency domain features
由图14时域特征值分布可以更直观的看到,以上时域特征具有比较好的可分性,它更加直观地体现了我们从表4中得到的结论。
图15为用SVM进行识别后的结果,其中红色的点为提前标定的类别即为实际的类别,而蓝色的点为用SVM识别的结果,每个样本的红色点和黑色点互相重叠的说明识别的结果是正确的,不重叠则说明是不正确的。
由图15可知,摆动和支撑之间的识别率比较低,而下蹲和起立的识别率还是比较高的,四种动作总的识别率为88.8%。
图16揭示了时频域特征值大小与频域特征的关系。
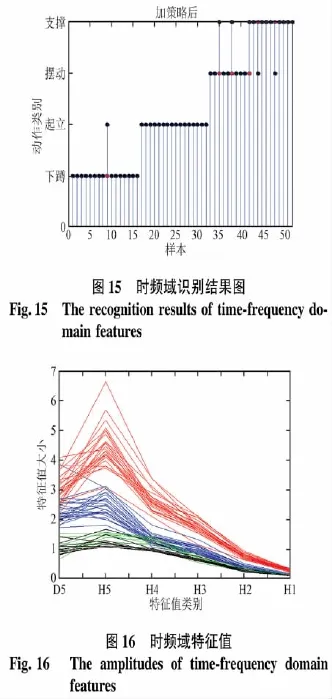
图16结果分析可知,摆动和支撑之间的识别率很低,但是仔细观察图16中的绿线和黑线可以发现,H3和H4之间的斜率相差比较大,所以我们可以用图16中H3和H4的斜率来识别支撑和摆动这两个动作。图17为加上斜率(slope)的特征值分布结果:
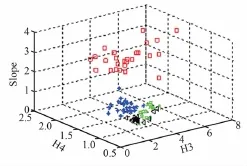
图17加斜率后特征值分布图Fig.17 Feature distribution w ith the slope
图18为加上斜率后的识别结果。通过比较第一次识别结果(如图15所示)和本文提出的算法识别结果(如图18所示),可验证二次误样本的加斜率辨识算法能有效提高四种动作的时频域特征的识别率,在测试样本中的识别率达96.1%。
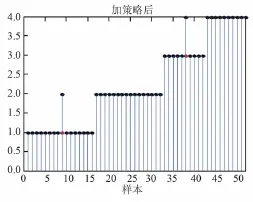
图18 加斜率后的识别结果Fig.18 The recognition resultsw ith the slope
6 结论
本文利用时域、频域和时频域三种特征提取方法,对人体下肢EMG反应特征进行了提取与分析,比较了三种方法对蹲、站、行走支撑与行走摆动四类人体典型运动行为可分类性,也提出并验证了一种基于支持向量机(SVM)特征值分析的误识别样本二次分类方法(DFRF)。与第一轮误识别结果相比,该方法能有明显的改善。验证结果也表明,时域和时频域方法在离线分析中正确率最高,为了考虑外界干扰等因素时频域方法具有较好的可靠性。
[1]强静,宋尧.国外航天生物医学发展战略[J].载人航天信息,2013,3:1-5. Qiang Jing,Song Rao.Foreign space biomedical development strategy[J].Manned Space Information,,2013,3:1-5.(in Chinese)
[2]白延强,吴大蔚.长期载人航天中的医学挑战与对策[J].航天医学与医学工程,2008,21(3):210-214. Bai Yanqiang,Wu Dawei.Long term manned spaceflight medical challenges and Countermeasures[J].Space Medicine &Medical Engineering,2008,21(3):210-214.(in Chinese)
[3]果琳丽,王平,朱恩涌.载人月球基地工程[M].北京:中国宇航出版社.2013:502-510. Guo Linli,Wang Ping,Zhu Enyong.Manned lunar base engineering[M].Beijing:China Aerospace Press,2013:502-510.(in Chinese)
[4]Xu Z,Tian Y,Li Z,et al.Proceedings of the International Conference on Information Engineering and Applications(IEA)2012[M].London:Springer,2013:495-503.
[5]Pal PR,Goswami G,Mohanty N P.Computer Networks and Intelligent Computing[M].Springer Berlin Heidelberg,2011:502-510.
[6]Ageberg E,Bennell K L,Hunt M A,et al.Validity and inter-rater reliability ofmedio-lateral kneemotion observed during a single-limbmini squat[J].BMCMusculoskeletal Disorders,2010,11(1):265.
[7]杨鹏,陈玲玲,郭欣,等.基于支持向量机的表面肌电信号识别[C]//2006中国控制与决策学术年会论文集. 2006. Yang Peng,Chen Lingling,Guo Xin,et al.Support Vector Machine based surface EMG signal recognition[C].Shenyang:China control and decision Symposium,2006.(in Chinese)
[8]Rekhi N S,Arora A S,Singh S,et al.Multi-Class SVM Classification of Surface EMG Signal for Upper Limb Function[C]//Bioinformatics and Biomedical Engineering,2009. ICBBE 2009.3rd International Conference on.IEEE,2009:1-4.
[9]杜树新,吴铁军.模式识别中的支持向量机方法[J].浙江大学学报:工学版,2003,37(5):521-527. Du Shuxin,Wu Tiejun.Support vector machine method in pattern recognition[J].Hangzhou:Journal of Zhejiang University:Engineering Science Edition,2003,37(5):521-527.(in Chinese)
[10]Xu Z,Tian Y,Li Z,et al.Proceedings of the International Conference on Information Engineering and Applications(IEA)2012[M].Springer London,2013:495-503.
[11]蔡立羽,王志中,张海虹.小波变换在表面肌电信号分类中的应用[J].生物医学工程学杂志,2000,17(3):281-284. Cai Liyu,Wang Zhizhong,Zhang Haihong.Application of wavelet transform in the classification of sEMG[J],2000,25(1):105-108.(in Chinese)
[12]胡晓,王志中,任小梅.小波变换和非线性分析在表面肌电信号中的应用及进展[J].北京生物医学工程,2006,25(1):105-108. Hu Xiao,Wang Zhizhong,Ren Xiaomei.Application and progress of sEMG signal by wavelet transformand nonlinear analysis[J].Beijing:Beijing Biomedical Engineering,2006,25(1):105-108.(in Chinese)
[13]贾雪琴,王旭,李景宏,等.基于小波变换和K-L展开的单通道表面肌电信号识别[J].东北大学学报:自然科学版,2006,27(8):859-862. Jia Xueqin,Wang Xu,Li Jinghong,etal.Single channel surface EMG signal recognition based on wavelet transform and K-L expansion[J].Shenyang:Journal of Northeastern University:Natural Science Edition,2006,27(8):859-862.(in Chinese)
[14]邱青菊.表面肌电信号的特征提取与模式分类研究[D].上海:上海交通大学,2009. Qiu Qingjun.Research on feature extraction and pattern classificationof surface EMG signal[D].Shanghai:Shanghai Jiao Tong University,2009.(in Chinese)
[15]王士允.基于表面肌电信号的膝关节康复机器人控制技术研究[D].南京:南京理工大学,2013. Wang Shiyun.Research on control technology of knee rehabilitation robot based on surface EMG signal[D].Nanjing:Nanjing University of Science and Technology,2013.(in Chinese)
Support Vector M achine based Feature Extraction and
Recognition of EMG Signals during Lower Extrem ity M ovement
ZHANG Yi,ZHAO Huilong,ZHANG Xianggang,QIN Kaiyu
(The Human-machine Coupling Technology Laboratory,School of Aeronautics and Astronautics,University of Electronic Science and Technology of China,Chengdu 611731,China)
To effectively identify the dynamic behaviors of squat,stand,support,and swing phases ofwalking from EMG signals in the lower extremity,three healthy and untrained subjectswere invited to participate in the exercise experiment.During experiments,the EMG signals of vastusmedialis in terms of squat,stand,support,and swing phases ofwalking were investigated and the features of the time-domain,frequency-domain,and time-frequency domain were extracted respectively.The experimental data showed that those dynamic characteristics were distinctively different.Based on the observed experimental results,the authors proposed a Double-round Feature Recognition and Filtering(DFRF)approach for the error recognition samples by using Support Vector Machine-based Regression(SVM).Compared to the previous recognitionmethods,it is advantageous that the error recognition rate can be well improved since those error recognition samples evaluated by the firstround feature recognition are further filtered following the second-round feature recognition.The proposedmethod also showed a promising result,indicating that the EMG featuresextracted by time-domain and time-frequency domain have better recognition performance than those by frequency-domain.
lower extremity;EMG;feature extraction;support vectormachine;time-frequency domain
V445,TP391
A
1674-5825(2015)02-0179-08
2014-12-01;
2015-03-13
中央高校基本科研业务费项目(ZYGX2013J123)
张羿(1984-),男,博士,讲师,研究方向为生理信号处理、生理参数的监护、建模与控制。E-mail:yi.zhang@uestc.edu.cn
张向刚(1973-),男,博士,副教授,研究方向为人机系统与机器人。E-mail:csxgzhang@uestc.edu.cn
