基于改进等效滑模控制的振动主动控制研究*
2015-11-04钱星光马天兵张建君
钱星光,马天兵,2,张建君,李 东
(1.安徽理工大学机械工程学院,安徽淮南 232001;2.南京航空航天大学机械结构力学及控制国家重点实验室,南京 210016)
基于改进等效滑模控制的振动主动控制研究*
钱星光1,马天兵1,2,张建君1,李 东1
(1.安徽理工大学机械工程学院,安徽淮南 232001;2.南京航空航天大学机械结构力学及控制国家重点实验室,南京 210016)
针对压电智能结构,引入对参考模型具有良好跟踪效果的等效滑模控制来抑制其振动。鉴于传统等效滑模控制在滑模函数较大的情况下系统趋近滑动模态速度过慢的问题,提出在传统的等效滑模控制的基础上耦合趋近项,形成了一种改进的等效滑模控制,并通过Lyapunov方法证明了改进后控制系统的稳定性。结合参考模型,分析比较了正弦扰动激励下的改进等效滑模控制与传统等效滑模控制的控制效果。仿真结果表明,改进的等效滑模控制系统具有更好的鲁棒性和稳定性。
压电智能结构;等效滑模控制;趋近项;振动主动控制
0 引言
目前,用于振动主动控制的方法有很多,如:模糊控制、神经网络控制、直接速度负反馈(DVFB)、自适应PD等等。但由于模糊控制需要设计复杂的规则[1-2],,神经网络控制计算量大、实时性差[3],直接速度反馈方法具有无条件稳定性,但是容易出现控制溢出问题[4],自适应PD控制考虑了对象的输出误差和误差的变化速度,所以本质上无法快速减小稳态误差[5]。等效滑模控制,相对于上述的控制方法,该控制策略在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的偏差情况进行有目的性的不断变化,迫使系统按照预定的“滑动模态”的状态轨迹运动[6-9]。在关于智能结构振动控制的等效滑模控制方面的研究还相对较少。传统等效滑模控制在滑模函数较大的情况下,系统趋近滑动模态速度过慢[10-11]。为了克服传统等效滑模控制的缺点,本文在传统等效滑模控制的基础上藕合趋近项来进一步提高系统阻尼与刚度,从而有效抑制系统的振动。
1 滑模控制原理
1.1 原理介绍
考虑如下被控对象:

式中a1、a2、a、α均为正实数,x为被控对象的振动位移,F为扰动力,u为控制电压。

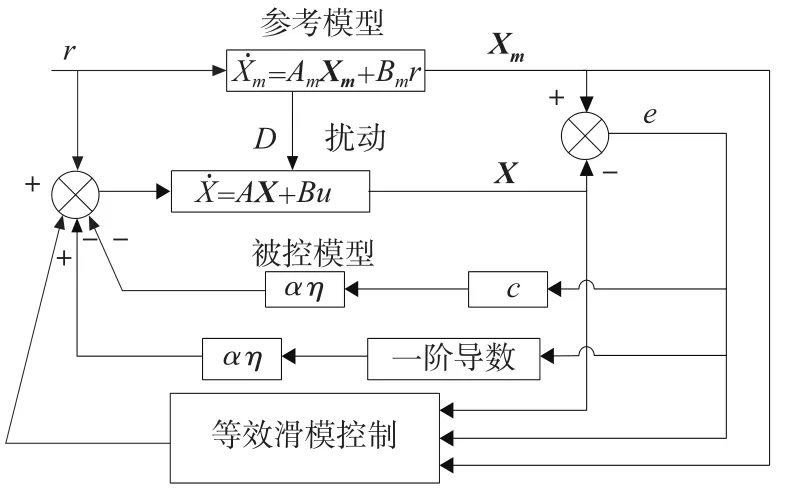
图1 改进的等效滑模控制原理图
1.2 稳定性证明
现构造下列的Lyapunov函数

从而根据Lyapunov稳定性判定规则可知,改进后等效滑模控制具有全局的渐进稳定性。
2 系统模型的确定
本文被控对象选用飞机壁板模型,通常将其简化处理为简支板结构[12],系统的时域模型参照文献[13],压电板结构第一阶模态频率和阻尼比分别52.65 Hz和0.007,系统状态方程为:

3 仿真结果与分析
在仿真控制系统中,依据文献[14]中的系数设定方法,再结合本模型经多次实验调试取K=50、η= 10、c=25。
采用幅值为5V的正弦信号激励。通过控制前后与参考模型跟踪的响应图,来分析比较传统等效滑模控制与改进后的等效滑模控制的效果。
对于模型第一阶模态,从图2可知,控制前后系统模型的振动幅度大幅下降,同时,由于传统等效滑模控制与改进后的等效滑模控制的基础都是基于参考模型,对于参考模型的跟踪优劣体现了控制算法的有效程度,从图3中可以看出,在t=0.043s时,相对传统等效滑模控制,改进后的等效滑模控制能够更快、更好的跟踪参考模型。
对于模型第二阶模态,从图4、图5中可以看出,模型的第二阶模态更好的验证了改进后的等效滑模控制效果优于传统等效滑模控制。
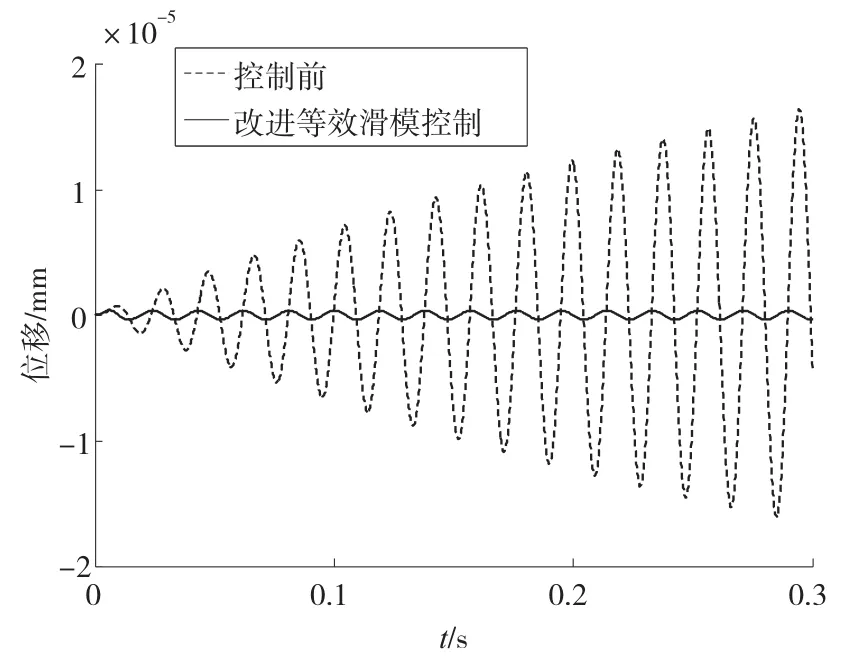
图2 正弦信号扰动下第一阶模态控制效果
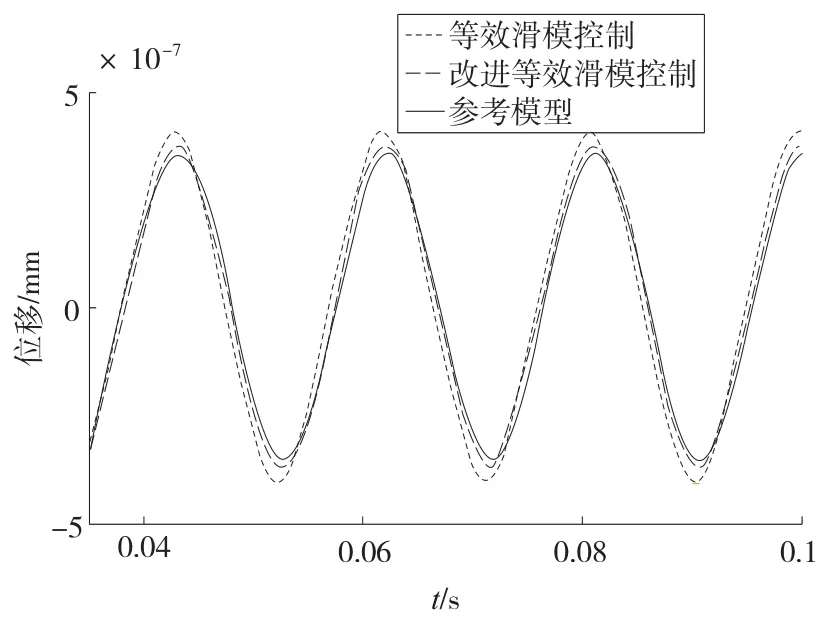
图3 正弦信号扰动下第一阶模态跟踪效果比较

图4 正弦信号扰动下第二阶模态控制效果
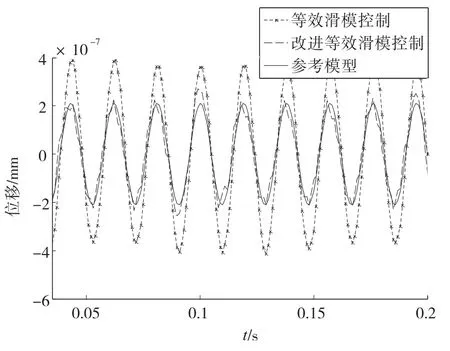
图5 正弦信号扰动下第二阶模态跟踪效果比较
4 总结
本文针对压电智能板结构的前两阶模态,引入传统等效滑模控制对其振动进行控制,基于参考模型并在原控制律的基础上藕合指数趋近项方法,通过Lyapunov方法证明了该控制系统的稳定性。通过施加正弦信号激励,分析比较了控制前后输出位移和传统与改进等效滑模控制对于参考模型的跟踪效果,仿真结果表明:改进的等效滑模控制相对于传统的等效滑模控制具有更快的收敛速度和更小的跟踪误差,控制效果更优。
[1]王积伟.现代控制理论与工程[M].北京:高等教育出版社,2003.
[2]杨敬锋,薛月菊,胡月明,等.基于精简模糊分类关联规则的分组模糊判决方法[J].系统工程理论与实践,2008(3):139-143.
[3]Ratneshwar Jha,ChengliHe.Neural-network based adaptive predictive control for vibration suppression of smart structures[J].Smart Mater-ialsand Structures,2002,11:909-916.
[4]王波.点式压电智能结构振动控制方法改进的研究[D].重庆:重庆大学,2004.
[5]徐达,帅元,郝琢,等.弹药装填机器人自适应PD控制算法[J].装甲兵工程学院学报,2011,25(1):49-53.
[6]K D Young,V I U Ozguner.A Control Engineer,Guide to Sliding Mode Control[J].IEEE Transactions on Control System,1999,7(3):328-342.
[7]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[8]瞿少成.不确定系统的滑模控制理论及应用研究[M].武汉:华中师范大学出版社,2008.
[9]彭书华,李华德,苏中,等.白噪声干扰下电动舵机等效滑模跟踪控制器设计[J].电气传动,2009,39(3):36-39.
[10]钟义长,钟伦珑,陈聪.基于滑模变结构的异步电机矢量控制及DSP实现[J].电力电子技术,2010,44(8):66-67.
[11]徐光智,孙秀霞,杨鹏松,等.无抖振离散滑模输出反馈控制方法及仿真研究[J].计算机测量与控制,2012,20(3):675-677.
[12]李凤明,陈照波,崔玉波.采用压电材料提高超声速飞行器壁板结构的颤振特性[J].固体力学学报,2011,32(s1):214-218.
[13]马天兵,裘进浩,季宏丽,等.基于鲁棒模型参考的智能结构振动主动控制研究[J].振动与冲击,2012,31(7):14-18.
[14]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2012.
(编辑 李秀敏)
Study on the Active Vibration Control Based on Improved Equivalent Sliding M ode Control
QIAN Xing-guang1,MA Tian-bing1,2,ZHANG Jian-jun1,LIDong1
(1.College of Mechanical Engineering,Anhui University of Science and Technology,Huainan Anhui 232001,China;2.State Key Laboratory ofMechanics and ControlofMechanical Structures,Nanjing University of Aeronautics&Astronautics,Nanjing 210016,China)
In order to suppress the vibration of the piezoelectric smart structure,the equivalent sliding mode controlw ith perfect referencemodel tracking performance is usually adopted.But it is lack of steadiness under large slidingmode function,Therefore,reaching term is coupled into equivalent slidingmode control to improve equivalent slidingmode control,and the stability of the new control system is verified by Lyapunov method.The reference model is determined according to the shrinking factor method.Simulation results show that the improve equivalent slidingmode control could have better robustness and stability according to track displacement and output displacement effects compared w ith equivalent slidingmode control under sine signal excitation.
piezoelectric smart structure;equivalent sliding mode control;reaching term;active vibration control
TH166;TG659
A
1001-2265(2015)07-0118-03 DOI:10.13462/j.cnki.mmtamt.2015.07.032
2014-10-14;
2014-11-17
国家自然基金资助项目(51305003);安徽省高校优秀青年人才基金重点资助(2012SQRL045ZD)
钱星光(1989-),男,四川遂宁人,安徽理工大学硕士研究生,从事振动控制方面研究,(E-mail)austqxg@163.com。
