CARMAX模型的在线修正参数预测滤波PID控制
2015-11-03侯小秋
侯小秋
(黑龙江科技大学 电气与控制工程学院,哈尔滨150022)
CARMAX模型的在线修正参数预测滤波PID控制
侯小秋
(黑龙江科技大学 电气与控制工程学院,哈尔滨150022)
针对CARMAX模型,采用系统的输出预测值代替系统的当前输出值,提出一具有预测控制性能的增量型预测滤波PID控制算法。采用改进可克服算法病态的递推最小二乘算法对被控对象进行参数估计,利用自校正预报显式算法对系统输出进行预测,根据建立的可克服算法病态的直接极小化指标函数自适应控制算法和Robbins-Monro算法,给出具有在线修正PID控制参数和加快PID控制参数收敛性能的CARMAX模型的自适应预测滤波PID控制算法。结果表明:所给出的算法具有较好的预测控制性能和控制品质。
自适应控制;预测控制;PID控制;参数估计;自校正预报
PID控制是一种传统有效的控制算法,具有结构简单、鲁棒性好、可靠性高等优点,结合现代先进控制理论,如自适应控制、智能控制、模糊控制等,至今已提出了一些具有预测控制性能的在线修正参数,整定参数的PID控制算法,这些算法结合了PID控制和先进控制的优异性能。文献[1]研究了直接极小化指标函数的自适应PID控制,但所提出的算法无预测控制和无滤波性能,并且不具有加快PID控制参数的收敛速度的性能。笔者提出一种具有预测控制和滤波性能的直接极小化指标函数的自适应预测滤波PID控制,算法的指标函数中含有系统的输出预测值,具有加快PID控制参数收敛速度的性能。
1 CARMAX模型的参数估计和预测
1.1CARMAX模型
设系统由CARMAX模型描述

式中:y(t)——1维输出;
u(t)——1维输入;
e(t)——零均值,方差为的白噪声序列;
t——离散时刻;
d——系统的时滞;
q——后移算子;
A(q-1)、B(q-1)、C(q-1)——多项式。
而
式中:ai、bi、ci——系数;
na、nb、nc——阶数。
1.2改进可克服病态的递推最小二乘算法
将文献[2]的可克服病态的递推最小二乘算法应用于文中进行参数估计,并对其进行改进,将待估参数准则函数中的待估参数增量约束项的等权的加权因子改进为不等权的时变的对角矩阵。
将式(1)写为

式中:Y(t)——系统的输出的集合;
U(t-d+1)——系统的输入的集合;
E(t)——噪声的集合;
θ——未知参数;
f(…)——线性函数。
参数估计的准则函数
式中:N——离散时刻;
μ——遗忘因子;
λ1(N)——权重对角矩阵;
JN(θ)——参数估计的准则函数。
[2]的推导,可得如下遗忘因子递推最小二乘算法

式中:P(N)——参数估计误差协方差阵;
φ(N)——f(…)关于θ的梯度;
1.3自校正预报显示算法
文献[3]的自校正预报显示算法应用于文中,给出系统输出的预测序列和预测误差序列为

式(3)中Gj(q-1)和Fj(q-1)由递推Diophantine方程确定
式中:ngj——阶数。
2 改进的直接极小化指标函数的自适应控制算法
2.1直接极小化指标函数的自适应控制
文献[4]的算法应用于文中,设控制器的形式为

式中:η——控制器可调参数向量;
Φ(t)——系统输出和输入构成的集合;
Φr(t)—— 系统输入参考信号 r(t{})所形成的序列向量;
η(…)——控制函数。
系统的输入和输出自然是随η的改变而改变,以y(t,η)和u(t,η)表示系统式(1)受式(5)控制时的输出和输入,要求选择向量η使如下指标函数达到极小化,

式中:V*(η)——指标函数;
E(…)——求均值;
g*(…)——函数。
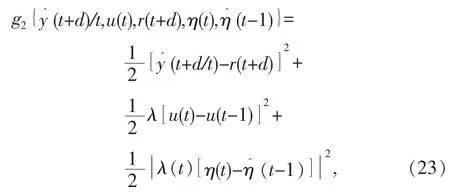
则上述问题可结合Robbins-Monro算法[5],给出如下自适应算法
ρ(t)——收敛因子;
Q(t)——Hessian矩阵。
2.2改进的可克服病态的自适应控制算法
式(8)的矩阵有时出现病态,导致式(7)、(8)的算法出现病态,为了使算法能克服病态,参考文献[2]的机理,对式(6)的指标函数进行改进,在其中加入控制器可调参数向量的增量约束项,提出一可克服病态的直接极小化指标函数的自适应控制算法,其指标函数为

式中:V(η)——指标函数;
g(…)——函数;
η(t)——时刻的η。
式中:λ(t)——控制器可调参数向量增量约束项的权重对角矩阵。

式中:n——η的维数。
由式(16)得
则改进的直接极小化指标函数的自适应控制算法为
3 增量型预测滤波的PID控制
传统的增量型滤波PID控制为

式中:r(t)——参考输入;
H(q-1)、△、S(q-1)——多项式;
H(q-1)=1+h1q-1;
△=1-q-1;
S(q-1)=s0+s1q-1+s2q-2;
h1、s0、s1、s2——可调参数。
则η为
由式(12)可知算法无预测性能,这里采用系统输出y(t)的预测值(t+d-1/t),代替y(t)给出增量型预测滤波PID控制。

式(13)中的预测值y^(t+d-1/t)针对系统式(1)来说其预报迟了一步,但实际的系统一般都是连续系统,连续系统转化为离散系统数学模型时在理论上增加了一步时滞,所以对实际的被控对象连续系统不存在迟一步预报的问题。
4 梯度和二阶导数矩阵
4.1梯度表达式
推导可得

式中:T(q-1)——多项式。
式中:T(q-1)=△AHC+q-1SBC;
H、C——H(q-1)、C(q-1)的简写。综上分析由式(14)和式(15)可得
∂y(t+j,η)/∂η,(j=1,2,…,d)。由式(1)两边对η求偏导

式(4)两边对η求偏导
4.2二阶导数矩阵表达式
推导可得
综上分析由式(18)~(21)可确定
由式(16)两边对ηp(p=1,2,3,4)求偏导得
由式(17)得
5 在线修正参数的预测滤波PID控制
为加快PID参数收敛的速度,选取
式中:λ——加权因子;
g1(…)——函数。
由式(4)和参考文献[6]的机理,式(22)的指标函数等价于如下指标函数
式中:g2(…)——函数。
将式(23)代入式(10)(11)可得如下自适应预测滤波PID控制
6 仿真研究
被控对象为

式中:a1=0.4+0.1t/400,
e(t)——随机干扰е(t)~N(0,1/10)。系统的参考输入

输入的饱和限幅为Umax=0.4。
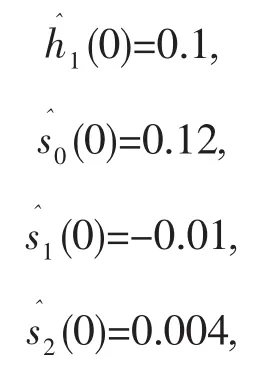
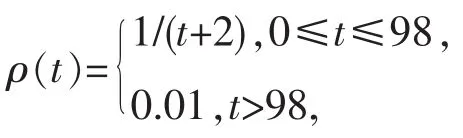
PID控制的初始参数为
直接极小化算法中的Q(0)=100I,λ=30收敛因子
参数估计的遗忘因子

待估参数的初始参数为
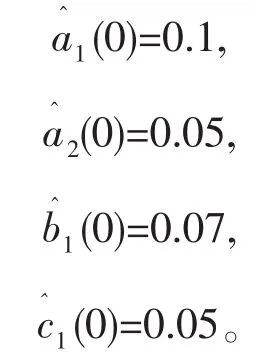
采用Matlab 7.0语言编程仿真,图1为PID控制参数的修正曲线,图2为系统响应曲线。由图2a可知,采用无修正的初始参数控制的响应曲线超调大,调节时间长,并且产生振荡。由图2b可知,在0≤t<200时,因PID控制参数还没有收敛到有效值,故响应的超调大,调节时间长,在200≤t≤400时,因PID控制参数已修正到有效值,故响应的超调小,调节时间短。由图1可知,参数在动态时进行修正,在稳态时停止修正,符合算法的物理性。
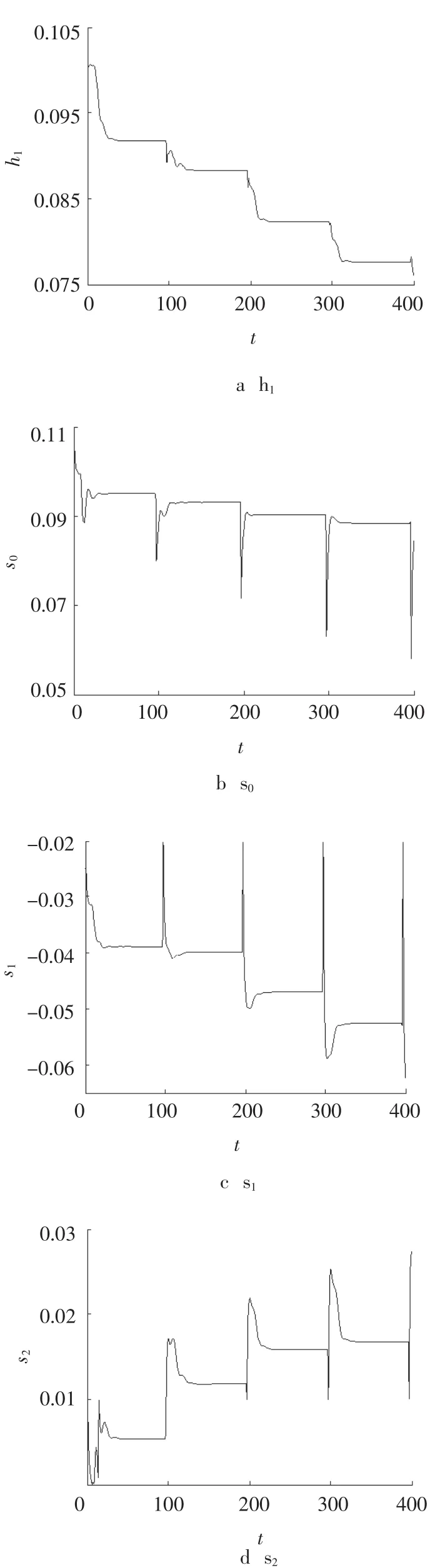
图1 PID控制参数的修正曲线Fig.1 Modifying curve of control parameter
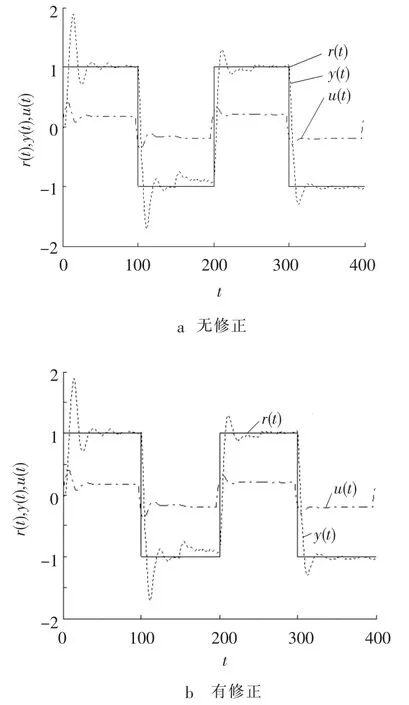
图2 系统响应曲线Fig.2 Response curve of system
7 结 论
(1)将待估参数准则函数中的待估参数增量约束项的等权的加权因子改进为不等权的时变的对角矩阵,提出可克服病态的遗忘因子递推最小二乘算法。
(2)在指标函数中加入控制器可调参数向量的增量约束项,提出一可克服病态的直接极小化指标函数的自适应控制算法。
(3)采用系统输出的预测值代替系统输出值给出增量型预测滤波PID控制。
(4)基于可克服病态的直接极小化指标函数的自适应控制算法和Robbins-Monro算法及增量型预测滤波PID控制,给出了CARMAX模型的自适应预测滤波PID控制算法,算法的指标函数中含有系统的输出预测值,使算法具有加快PID控制参数收敛到有效值速度的性能。
(5)仿真研究表明因所提出的算法具有预测控制性能,故具有较好的控制品质,且具有柔化控制量变化减少对系统执行机构冲击的性能。
(6)缺点是较文献[1]的算法对随机干扰的统计性质要求高,要求随机干扰为零均平稳具有有理谱密度的随机干扰,适用范围较文献[1]的算法窄。
(7)进一步需研究算法的稳定性和算法的收敛性,将算法推广到多变量情形及非线性系统(双线性系统,Hammerstein模型,NARMAX模型等)上。
参考文献:
[1]侯晓秋.直接极小化指标函数的自适应PID控制[J].黑龙江科技学院学报,2008,18(1):47-50.
[2]CHEN YENMING,WU YUNGCHUN.Modified recursive leastsquares agorithm for parameter identification[J].Int.J.System Sci.,1992,23(2):187-205.
[3]席裕庚.预测控制[M].北京:国防工业出版社,2013:17-23.
[4]LJUNG L,TRULSSON E.Adaptive control based on explicit crirerion minimization[J].IFAC 81 World Congress,Preprints,1981(7):1-6.
[5]萧德云.系统辨识理论及应用[M].北京:清华大学出版社,2014:189-192.
[6]韩正之,陈彭年,陈树中.自适应控制[M].北京:清华大学出版社,2014:109-115.
(编辑李德根)
Prognosis-filtering PID control with on-line modifying parameter for CARMAX model
HOU Xiaoqiu
(School of Electrical&Control Engineering,Heilongjiang University of Science&Technology,Harbin 150022,China)
This p aper introduces an algorit hm behind prognosis-filtering PID control——an incremental algorithm with predictive control performance.The algorithm is developed by using the forecast output values of the system instead of the current output values of the system for CARMAX model.The study details parameter estimation of controlled model using the modified recursive least squares algorithm capable of overcoming drawbacks inherent in algorithm;prediction of the system output using the self-tuning prediction explicit algorithm;and the development of an adaptive prognosis-filtering PID control algorithm capable of on-line modification of PID control parameters and faster convergence of PID control parameter for CARMAX Model using the combination of newly developed adaptive control algorithm capable of overcoming drawbacks inherent in algorithm for direct minimization index function and the Robbins-Monro algorithm.Results indicate that the proposed algorithm exhibits the superior predictive control performance and control quality.
adaptive control;predictive control;PID control;parameter estimation;self-tuning prediction
10.3969/j.issn.2095-7262.2015.06.022
TP273
2095-7262(2015)06-0686-06
A
2015-09-16
侯小秋(1965-),男,黑龙江省双城人,副教授,硕士,研究方向:非线性控制、预测控制及自适应控制,E-mail:hxq71265@163.com。
