基于变权重最小二乘法图像边缘特征提取算法的研究及应用*
2015-11-03林海波潘万贵
林海波,潘万贵
(1.台州职业技术学院机电工程学院,浙江台州 318000;2.浙江大学CAD&CG国家重点实验室,杭州 310027)
基于变权重最小二乘法图像边缘特征提取算法的研究及应用*
林海波1,2,潘万贵1
(1.台州职业技术学院机电工程学院,浙江台州 318000;2.浙江大学CAD&CG国家重点实验室,杭州 310027)
为了快速准确检测机器视觉中零件边缘,针对具有清晰边缘的中高精度复杂形状的薄板类机械零件背光图像,提出一种数字图像的亚像素边缘特征提取方法。该方法首先用Ramer算法对大量亚像素边缘坐标数据按照直线和圆弧等基本几何元素进行分段。然后改进最小二乘法,根据离散点到预拟合曲线的距离设置权重,消除离值点的影响,迭代拟合零件轮廓的圆弧和直线的算法。同时计算圆弧直径、圆度精度、中心距尺寸精度。齿轮泵中间体零件的检测结果表明,该方法能快速准确检测小尺寸平面孔系的孔距、孔径等几何量精度,该方法具有较高的可拓展性,为机器视觉精密测量进一步的研究和应用提供参考。
轮廓分割;最小二乘法;曲线拟合;权重函数
0 引言
图像最基本的特征是边缘,图像的位置、轮廓等许多有用的信息都存在于图像的边缘中,是图像中不确定性最大和区域属性发生突变的地方。其主要表现为图像局部特征的不连续性,即图像中灰度的不连贯,与噪声信号类似。图像边缘检测是图像分析、图像处理和计算机视觉的基础和前提,广泛应用于计算机视觉、图像处理等领域[1-5]。边缘检测常用的算子主要有LOG算子,Prewitt算子、Sobel算子、Canny算子等。而在视觉测量中,机械零件边缘特征的提取,是对边缘检测数据的处理,直接影响到最终的测量精度,越来越多的国内外学者对零件边缘的特征提取技术进行深入研究[6-8]。张刚[9]等提出一种采用Gabor小波的纹理特征提取方法,并把这种方法应用于纹理特征的提取。赵巨波[10]等利用小波变换天生的多尺度特性,对小波变换各尺度下的细节图像用互能量交叉的方法进行噪声抑制和边缘识别。皋军[11]等提出一种矩阵模式的模糊最大间距判别准则,并在此基础上形成具有模糊聚类功能的双向二维无监督特征提取方法。任少斌[12]等将偏微分方程PDE与形态学腐蚀算子相结合,强化了边缘特征。夏军营[13]等提出一种利用梯度信息的快速直线边缘提取方法。
随着机器视觉广泛应用在各种测量,精度要求不断提高,为了进一步提高边缘检测精度,人们提出了不同类型的亚像素边缘检测理论与技术。数字图像中存在由光学、机械、电气等各方面原因造成的噪声,滤波和边缘提取算法尽量消除噪声的影响,但仍然存在一些噪声不能滤除。同时,数字图像的分辨率日益提高,已达到千万级,尤其在精密测量中,亚像素的应用使数据点达到108以上,亚像素图像边缘像素的个数也在104以上。因此为了进一步降低随机噪声和计算误差对边缘定位精度的影响,提高计算精度和效率,笔者对特征提取的理论进行了较多的探索,力求对特定目标提出高精、高效的算法和方法,针对具有清晰边缘的背光机械零件图像,本文主要对数字图像处理的关链步骤边缘特征提取进行研究。
1 亚像素边缘
图像经过数字化后,产生一个实数矩阵,矩阵各点的数值对应图像空间点的灰度值,g(i,j)为第i行j列像素的灰度值,因此,对图像的各种处理就是对矩阵进行的各种运算,高精度图像测量,本质上是边缘等信息的精确定位。边界提取的结果是亚像素精度的轮廓点的集合,轮廓点定义为pi=(ri,ci),i=1,…n。某一轮廓对应多种不同类型几何元素,将轮廓分割实质上就是找到轮廓点上的子集,pij=(rj,cj),j=1,…m,m<n,对应某一段直线或圆弧。
图1所示为齿轮泵中间体的背光数字图像提取的轮廓。该零件轮廓共有6个封闭环,4个直径12mm的销孔,外环为8段圆弧和8段直线的组合,内环为4段圆弧的组合。

图1 图像细分后提取的亚像素边缘
Ramer算法是将曲线近似表示为一系列点,并减少点的数量的一种算法。对轮廓进行递归细分,直到所得全部线段到各自对应的轮廓段的最大距离小于某一指定的阀值[14]。图2所示为轮廓的一部分,宏观上是连续的一段圆弧和一段直线的组合,微观上是点的集合。首先是首尾相连,轮廓上的点到直线AB的距离显然过大,如图2a所示。在曲线中间插入一点C, AC和BC分别相连,曲线上的点到AB的距离仍然过大,继续密化。如图2b~图2d所示。用Ramer算法将轮廓分割成线段,检查这些线段能否被合并成圆(弧)。如果彼此相连的直线有相同的角度,则为同一条直线。如果圆弧拟合误差比两段直线的最大误差还要小,则这两段直线标记成合并处理的候选对象。

图2 Ramer算法
2 边缘特征提取
2.1 最小二乘曲线拟合
分割成圆弧和直线的亚像素边缘点组合,pij=(ri,ci),j=1,…m,m<n。经过标定,转化为以mm为单位的直角坐标系坐标,可用下面的多项式进行拟合,即

要求所有数据点到曲线上的距离平方和最小,有

根据多元函数求极值的必要条件,则有

得到方程组

如果用矩阵向量表示,则式(4)可以表达为

式中
由式(5)可以得到系数矩阵的最优估计为

2.2 变权重最小二乘边缘特征提取
在最小二乘法里,由于采用的是距离的平方,所以与曲线距离远的点在最优化过程中将会产生非常大的权重,使曲线偏离最优值。为了使拟合更具鲁棒性,减少离群值的影响,必须引入权重函数。远离曲线的点,其权重应该小于1。定义权重函数为:

т为削波因数,距离大于т的点为离群值,拟合曲线时被忽略。其余点的权重在0-1之间。由于离群值的丢弃将影响圆度误差计算,因此本文根据到直线的距离值的标准偏差来确定т的值。
引入权重函数后,式(2)被修正为
图3所示为量块边缘直线特征拟合结果比较。变权重最小二乘拟合减少了离值点的影响,比最小二乘拟合更符合原有边缘数据点。

图3 量块边缘直线特征拟合
3 实验与分析
图1所示的齿轮泵的中间体数字图像提取的轮廓,轮廓多为圆弧,需要保证基准孔的圆度公差和中心距,精度要求为IT7级(±0.0125mm)。如采用传统方法测量,需要测量计算中心孔的孔径、圆度误差,还要用多组量具间接法测量中心距,费时费力。中间8字形孔为4段IT7级精度的轴承孔的组合,其精度和孔距精度对于齿轮泵至关重要,直接影响齿轮泵的工作效率、噪音及寿命等。表1所示为该零件8字形内轮廓的测量数据。采用标准的圆拟合算法和采用变权重拟合法结果比较,标准的最小二乘算法得到的圆受零件非精加工边缘上缺陷(毛刺、表面粗糙度)的影响,变权重的拟合算法修正了这种影响。
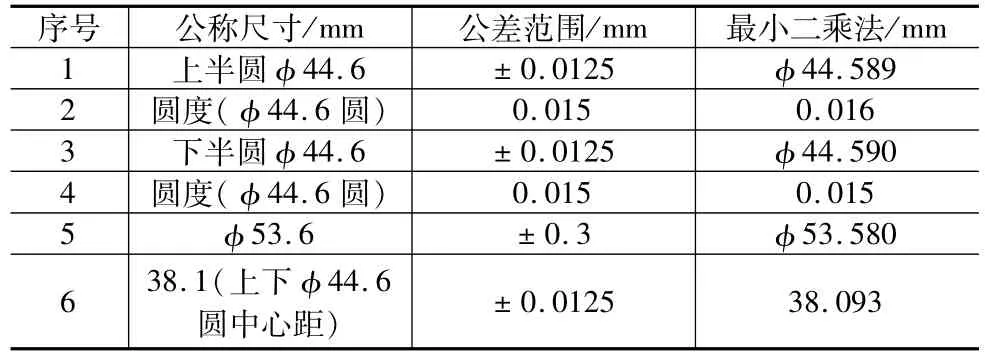
表1 8字形内轮廓测量数据

续表
4 结论
本论文利用构建工业CCD视觉系统和编制的图像处理软件实现对薄零件几何量精度的非接触、高精度、自动测量,从CCD传感器拍摄的背光数字图像中提取出零件轮廓信息,对大量亚像素边缘坐标数据按照直线和圆弧等基本几何元素进行分段,然后改进最小二乘法,变权重拟合出零件轮廓的圆弧和直线,并计算圆度误差,中心距尺寸误差。齿轮泵中间体零件的检测表明,该方法简单而又实用,能快速准确检测中高精度薄零件的几何量精度,且对于小尺寸平面孔系的孔距、孔径等几何量精度的检测最为快速有效,具有广泛的应用前景。
[1]伍济钢,宾鸿赞.机器视觉的薄片零件尺寸检测系统[J].光学精密工程,2007,15(1):124-130.
[2]屈玉福,浦昭邦,王亚爱.视觉检测系统中亚像素边缘检测技术的对比研究[J].仪器仪表学报,2003,24(4):460-462.
[3]张洪涛,段发阶,叶声华.一种快速亚像素边缘检测方法研究[J].计量学报,2002,23(4):263-265.
[4]Tai SC,Yang SM.A fast method for image noise estimation using laplacian operatorand adaptive edge detection[J].International Symposium on Communications,Control and Signal Processing,Malta,2008:1077-1079.
[5]张永宏,胡德金,张凯,等.基于灰度矩的CCD图像亚像素边缘检测算法研究[J].光学技术,2004,30(6):693-695.
[6]连静,王珂.样条小波自适应阈值多尺度边缘检测算法研究[J].系统仿真学报,2006,18(6):1473-1482.
[7]李玲.数字图像点特征及边缘特征提取方法的研究与实现[D].西安:西安科技大学,2012.
[8]杜亚勤,洪波,郭雷,等.一种曲面拟合图像边缘特征提取算法[J].西安电子科技大学学报,2011,l38(3):164-168.
[9]张刚,马宗民.一种采用Gabor小波的纹理特征提取方法[J].中国图象图形学报,2010,15(2):247-252.
[10]赵巨波,孙华燕,杜巍.一种图像边缘特征提取算法[J].光学精密工程,2000,8(4):325-327.
[11]皋军,孙长银,王士同.具有模糊聚类功能的双向二维无监督特征提取方法[J].自动化学报,2012,38(4):549-561.
[12]任少斌,李元宗.异质扩散的图像边缘特征提取方法研究[J].计算机应用与软件.2012,29(2):269-271.
[13]夏军营,徐小泉,熊九龙.利用梯度信息快速提取直线边缘特征[J].中国图象图形学报,2012,17(8):987-994.
[14]Ramer U.An Iterative Procedure for the polygonal Approximation of Plane Curves[J].Computer Graphics and Image Processing,1972(1):244-256.
(编辑 赵蓉)
Research and Application of Edge Feature Extraction of Digital Image by Least Square Method with Weight Function
LIN Hai-bo1,2,PAN Wan-gui1
(1.School of Mechanical Engineering,Taizhou Vocational&Technical College,Taizhou Zhejiang 318000,China;2.State Key Laboratory of CAD&CG,Zhejiang University,Hangzhou 310027,China)
A rapid and accurate contours fitting method for backlight image of thin and complex mechanical parts with clear edge is presented.The large number of sub pixel edge coordinate data was divided into the basic geometric elements such as line and arc segments using the Ramer algorithm.The least square method was improved to eliminate the impact from the outliers based on distance between discrete points and the pre fitted curve.The arcs and straight lines is fitted robust,then circle diameter and center distance was calculated.The measurement results of gear pump intermediate part show that,this method can used in geometry precision measurement of thin parts with many holes quickly and accurately.This method is instructive for the further research and application in vision measurement.
segmentation of contours;least square method;curve fitting;weight function
TH166;TG659
A
1001-2265(2015)06-0118-03 DOI:10.13462/j.cnki.mmtamt.2015.06.032
2015-03-02;
2015-03-24
浙江省自然科学基金资助项目(LY14E050001);‶十二五‶国家科技支撑计划(2015BAH47F02);浙江省2014年高等学校访问学者专业发展项目(FX2014173);2013年度浙江省高职高专院校专业带头人专业领军项目(lj2013140)
林海波(1977—),男,浙江台州人,台州职业技术学院副教授,高级工程师,主要从事机电控制技术、智能算法的研究,(E-mail)linhaibo -tzvtc@163.com。
