超声纳米操控技术*
2015-11-03胡俊辉
胡俊辉, 汤 强, 王 旭
(南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
◀专家论坛▶
超声纳米操控技术*
胡俊辉, 汤强, 王旭
(南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
超声纳米操控是由超声学、纳米技术与驱动技术的相互交叉而产生的一项新技术,在纳米测量与组装、纳米加工、生物医学样品处理、微/光电子器件的制造以及新材料合成等领域有着巨大的应用前景。基于作者的研究团队在近3年中所取得的成果,介绍已实现的超声纳米操控功能及其工作原理、器件结构、特性与应用前景。这些操控功能包括纳米捕捉与移动、纳米旋转以及纳米聚集。论文将有效提升超声纳米操控技术的应用水平。
操控;纳米;超声;压电
引 言
纳米测量与组装、纳米加工、生物医学样品处理、高性能传感器制造、新能源材料加工、高性能电池制造以及环保等新兴领域对作动功能提出了新的需求,要求对纳米尺度物体进行受控的捕捉、移动、释放、定位、定向、旋转、聚集、分离、装配、排列和拉伸等操作。对纳米尺度物体实施上述受控操作被称为纳米操控[1-10]。纳米操控一般不能或无法有效地由传统的作动系统(如直线与旋转马达等)来实现,因而它是作动技术所面临的一个新挑战。由于纳米操控技术在新兴产业中的巨大应用前景,它已成为作动技术领域的一个研究热点[11-16]。
迄今已实现的纳米操控的工作原理主要有3大类,即物理、生物与化学纳米操控。已有的物理纳米操控的主要手段包括激光、介电泳、磁、微流体、机械和超声等[1];生物纳米操控的手段包括基于DNA分子链的组装和分子马达等;利用化学原理也可实现不少的纳米操控功能,例如利用水电解产生的微小氢气泡,可实现捕捉、移动、释放和姿态调整等操控功能。基于上述原理的纳米操控方法各有特点。
超声纳米操控利用声学涡流对纳米物体进行捕捉、移动、释放、定位、定向、旋转及聚集等受控操作。2012年以来,笔者的研究团队利用超声微探针、超声台与超声针等低频超声技术,实现了一系列受控的纳米操控功能[2,4-7]。2014年,美国国立标准与技术研究所提出了利用高频超声(3 MHz)对纳米线进行受控旋转驱动的方法[3]。在这些工作之前,超声的物理效应(如声空化与声表面波产生的声学流)已被用于纳米物体的分散与排列[1],但在这些应用中,被操作纳米物体的位置无法被控制,因而还不能算是严格意义上的操控。超声纳米操控功能的主要特点包括:a.操控部位温升低;b.操控范围大;c.可在用户给定的器件或基板上进行操控;d.具有对单个和多个物体进行操控的能力;e.操控功能多样;f.器件结构简单、制造方便。这些特点使得超声纳米操控在纳米测量与组装、纳米加工、生物医学样品处理、微电子与光电子器件的制造以及新材料合成等领域有着巨大的应用前景与商业竞争力。
已实现的超声纳米操控功能包括纳米线的捕捉、定位、定向、旋转以及纳米物体的聚集[2-8]。现介绍这些操控功能的器件结构、效果、原理和特性。
1 纳米线的超声捕捉、定位、定向与移动
纳米线的超声捕捉、定位、定向与移动在光学显微镜(VHX-1000,Keyence)下进行,如图1(a)所示。实验中,微操控探针(玻璃纤维)由与之垂直的钢针激励产生机械振动,微操控探针端部浸入硅基板上的纳米线溶液中。微操控探针直径10μm,全长2.5 mm。溶液由去离子水和分散在其中的银纳米线组成。其中,银纳米线直径100 nm,长度从几微米到几十微米不等。玻璃纤维端部和硅基板距离约为10μm。图1(b)为试验中用到的超声换能器的结构。微操控探针粘接在钢针端部,振动由夹心式换能器经钢针端部传递到玻璃纤维上。钢针长25 mm,直径1 mm。换能器中每片压电圆环的外直径,内直径和厚度分别为12,6和1.2 mm。压电常数d33为250×10-12C/N,机电耦合系数k33为0.63,机械品质因数Qm为500,介电损耗因子tanδ为0.6%,密度为7 450 kg/m3。换能器两端的不锈钢板为方形,换能器的预紧力矩为6 N·m。换能器工作在135 k Hz附近,此时钢针作弯曲振动。而夹心式换能器的共振频率为93 k Hz,因此操控系统工作在非共振状态。

图1 单根纳米线操控的试验装置Fig.1 Experimental setup for the mobile acoustic streaming based manipulations of a single silver nanowire
图2表示在硅基板表面银纳米线水溶液中驱动和抓取单根银纳米线的过程。图2(a)为驱动和抓取过程的示意图,xyz坐标系的原点o位于微操控探针端部的中心。图2(b)演示了驱动和抓取一根长32μm,直径100 nm银纳米线的系列照片。微操控探针沿着y方向进行往复振动。在该振动的作用范围内,位于基板表面的银纳米线可以被驱动向微操控探针端部下方的点移动(微操控探针端部在基板上的投影点),并同时转向微操控探针振动的方向(即y方向),如图2(a)中运动轨迹m1和图2(b)中b1~b4所示。在转向微操控探针振动方向后,银纳米线继续移动到微操控探针下方的投影点,如运动轨迹m2和图b4,b5所示。在微操控探针下方,银纳米线开始转到与微操控探针振动方向垂直(x方向),同时被提升至玻璃纤维端部的一侧,并且最终被推压在微操控探针端部的侧面,如运动轨迹m3,m4,和图b6~b8所示。在图2(b)的b8中,被抓取的银纳米线垂直于微操控探针振动方向并且于玻璃纤维基本对称。通过比较银纳米线全长与图b8中未被遮挡的银纳米线长度和直径可以得到该对称性。

图2 硅基板上银纳米线水溶液中单根银纳米线的抓取Fig.2 Driving and trapping of an Ag NW under the fiberglass tip in water by acoustic streaming
图3(a)为在银纳米线溶液中移动单根长20 μm,直径100 nm银纳米线的示意图,图3(b)给出了在移动过程中银纳米线在A,B,C,D和E位置时的照片。银纳米线初始位置位于微操控探针端部下方的位置A。然后在位置B银纳米线被提升并被抓取到振动的微操控探针的一侧。此后,通过移动整个操控系统提起银纳米线并通过位置C移动到位置D。在位置D,停止微操控探针振动,在玻璃基板表面释放银纳米线。整个操控系统的运动通过一个X-Y-Z三维平台手动控制,移动速度在每秒几微米到每秒几十微米。在移动过程中,换能器的操控频率和峰峰电压分别为135 k Hz和15 V。试验表明在银纳米线水溶液中,可以实现被抓取银纳米线的任意路径移动,在此过程中银纳米线不会掉落。银纳米线也不会粘在微操控探针上,因此本工作中释放银纳米线不成问题。另外,该操控系统还可由计算机控制(使用直流步进马达系统),以提高操控的效率并消除因手工操作引起的微操控探针的跳动问题[9]。
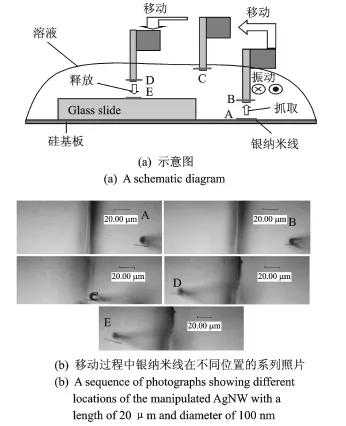
图3 3D移动并释放单根银纳米线Fig.3 3D transfer and release of a single Ag NW
通过观察微颗粒在微操控探针周围的运动轨迹,可获得微操控探针端部周围的三维声学流场的大致情况,如图4所示。该结果可很好地说明上述纳米线的运动现象与捕捉效果。y方向的声学流驱动基板表面的银纳米线至玻璃纤维端部下方的位置,同时驱动银纳米线至y方向。然后,在玻璃纤维端部的下方,声学流涡流驱动银纳米线至x方向,同时z方向声学流提起银纳米线至微操控探针端部的一侧。此后,y方向(或-y方向)声学流推压提起的银纳米线至微操控探针端部的侧面。玻璃纤维端部的超声场随着微操控探针移动而移动,所以在微操控探针端部的声学流场是可移动的,并且可以在移动中抓取纳米线。

图4 在超声振动下玻璃纤维端部周围的声学流场Fig.4 The acoustic streaming field around the tip of the fiberglass in ultrasonic vibration

图5 银纳米线抓取特性图Fig.5 The trapping capability characteristics
试验中定义两个参数,用于定量表示抓取性能。当在x=0处、沿y方向的纳米线与微操控探针的距离太大时,纳米线不能被微操控探针端部所吸取。表示抓取能力的第一个参数是:可用于捕捉的纳米线与微操控探针之间的最大水平距离dm;另一个参数是:可以吸附到微操控探针端部的纳米线的最大长度Lm。实验中采用位于x=0处并沿着y方向的一根长32μm、直径100 nm的银纳米线。峰峰电压为5,10,15,20,25和30 V时,测量最大捕捉距离dm随驱动频率变化的特性曲线,结果如图5(a)所示。从该图可知,最大距离dm在共振点处(约135 k Hz)达到最大值;最大距离随着驱动电压增大而增大。这些现象应该是由于微操控探针振动增强而导致声学流的增强引起的。图5(b)为测得的最大纳米线长度Lm随参考点p[见图1(b)]的振动位移幅值的变化曲线。它表明最大纳米线长度并不单一地随着振动位移的增加而增加,当振动位移过大时,Lm会随着振动的增加而减少。这是由于当振动过大时,长的纳米线更容易被冲走。试验中还使用红外线测温仪(Hioki 3419-20)测量了振动微操控探针周围的温升,测得驱动状态下温升小于0.1℃。这主要和下列两个因素有关:纳米操控只需用到数十纳米幅值的振动;声学流涡流会带走微操控探针周围的热量。
上述的纳米捕捉方法的优点有:具有同时定向的功能;温升低;可在任意尺寸与材料的基板上进行;可以自由地移动被捕捉的纳米物体等。上述方法中,被捕捉到的纳米线与微操控探针相接触,对微操控探针进行改造,还可以实现纳米线的非接触式捕捉[4]。关于这部分工作的更多内容,请参阅文献[1-3,4]。这一技术的潜在应用包括微纳生物样品的操作、微纳结构的装配以及纳米材料性能的测试等。
2 纳米线的超声旋转驱动
纳米线超声旋转驱动的试验装置如图6(a)所示,试验借助于光学显微镜(VHX-1000,Keyence)进行。在试验中,由铜板机械振动驱动的微玻璃纤维探针垂直浸没到具有纳米线的水膜硅基板上。玻璃纤维粗细均匀,直径为10μm,总长度为3.2 mm。基板上的水滴由去离子水和散布其中的银纳米线组成,其中银纳米线的直径约为100 nm,长度从几微米到几十微米不等。微探针尖端距硅基板的距离大约为10μm。图6(b)示出了振动激励系统的结构和尺寸。微探针由三明治式压电换能器驱动。换能器中的每个压电圆环的外径为12 mm,内径为6 mm,厚度为1.2 mm,压电常数d33为250× 10-12C/N,机电耦合系数k33为0.63,机械品质因数Qm为500,介电损耗系数tanδ为0.6%,密度为7 450 kg/m3。
换能器两端的不锈钢板为正方形,铜板通过粘合剂固定在其中一个正方形钢板的斜对角线方向上。施加在换能器上的拧紧力矩为6 N·m,换能器的工作频率在137 k Hz附近,而换能器的共振频率在93 k Hz左右,所以换能器不是工作在共振点,这样的好处可以保证旋转驱动的稳定性。试验中所用的超声装置如图6(c)所示。
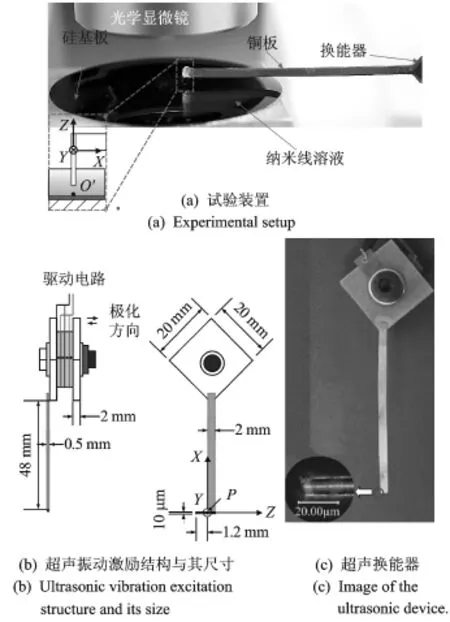
图6 旋转驱动位于硅基板上液膜中的银纳米线的试验装置Fig.6 Experimental setup and the ultrasonic device for rotary driving of a single Ag NW in water film on a silicon substrate
图7展示了试验中获得的硅基板上悬浮液中单根银纳米线的两种类型的旋转驱动模式。在实验中,换能器工作频率和工作电压(峰峰值)分别是137 k Hz和6 V。在图7(a)中,从图片a1~a8可以看出,一根80μm长,100 nm粗的银纳米线顺时针方向(从上往下看)旋转了一周,用时14 s。在图7(a)中,银纳米线的中点位于玻璃纤维的尖端O′点(见图1(a)),并绕着其中心旋转。图7(b)示出了另一种旋转模式,硅基板上30μm长,100 nm粗的银纳米线绕着自身的一个端点做顺时针旋转。银纳米线两种模式的下的旋转中心均位于玻璃纤维的尖端下方(见图6(a)中的点O′)。图片b1~b8显示的旋转周期为8.3 s。当银纳米线在旋转时,微探针端部附近银纳米线的旋转中心可以在其中点或端点,因此纳米线可能的旋装中心有两个:中点和端点,并且这两个点都位于微探针的下部。依据多次观测可以得出结论,纳米线的旋转中心是在其中点还是端点依赖于微探针的端部与纳米线最初的相对位置,如果纳米线的中点一开始靠近微探针的端部,则纳米线的中点会随着纳米线移动到微探针端部下方O′,并作为旋转中心。否则,纳米线的端点将移动到点O′,并成为旋转中心。
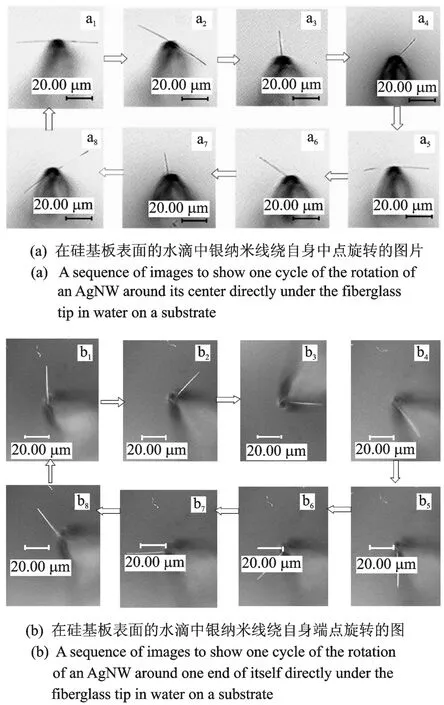
图7 连续显示振动玻璃纤维尖端驱动单根银纳米线旋转的图片Fig.7 Two Image sequences to show the rotation of an Ag NW under the vibrating fiberglass tip
为了解释上述实验现象和操控效果,笔者观察了微操控探针端部附近的声学流分布。试验时在振动的水膜中加入了碳化硅微团簇,可以观察到碳化硅微团簇在玻璃纤维尖端附近旋转的同时往玻璃纤维的尖端移动,如图8(a)所示,这表明微操控探针端部附近存在两种类型的声学流,一种绕着点O′做圆周流动,另一种指向点O′做径向流动,进一步通过高浓度的银纳米线悬浮液可以观察到沿着玻璃纤维的Z方向也有声学流。利用激光多普勒测振仪(POLYTEC PSV-300F),测量了微操控探针根部点P的X,Y方向的振幅和相位,在工作频率和峰峰电压为137 k Hz和10 V的情况下,X方向的位移为UX=0.042sin(2πft+2.25)μm,Y方向的位移为UY=0.097sin(2πft+0.69)μm。由于两者的相位差接近90°,点P在做椭圆轨迹的运动,如图8(b)所示。这种运动会搅动微操控探针附近的水并产生周向声学流,而径向声学流也可能由于微操控探针端部振动导致的低压而产生,Z方向的声学流可能是由于需要满足流动的连续性而产生。上述原理可以较好地解释为什么被驱动的纳米线旋转中心是在其中点还是端点,径向的声学流可以推动纳米线到微操控探针的端部,周向声学流使纳米线做圆周运动。当纳米线的中点距玻璃纤维尖端较近时,对称的径向声学流会推动纳米线的中点移动到微操控探针端部下方,以保证纳米线所受到的离心力和沿-r方向的径向推动力之间平衡。当纳米线的端点距离微操控探针端部较近时,同样为了保证上述两种力的平衡,纳米线会在径向力的作用下发生移动,并以端点为旋转中心。依据原理分析可知,媒介的粘性也会对旋转速度产生影响,因为粘性会影响到微探针搅拌速度和其附近的流动角速度的径向梯度,同时超声场的振动速度也会随着黏性的增加而减小。

图8 原理探究Fig.8 Principle investigation
图9(a)示出的是单根银纳米线绕其中点顺时针旋转时角位移量随时间几乎呈线性的关系(实验值),而图9(b)是由图9(a)推算的角速度与时间的关系。图9(b)表明:纳米线的角速度在开始旋转后的很短时间内就达到一个稳定值。测得的图10(a)表明:单根银纳米线绕其中点顺时针旋转时其角速度随电压的增加而增加;在同一电压下改变操控的频率,旋转的速度也会发生较大的变化。在试验中,137 k Hz时的角速度要比其他频率时的角速度大很多。因此可以通过改变操控电压和频率来改变银纳米线的角速度。试验中,银纳米线可以达到的最小角速度为0.001 r/s,这为高精度的定向操控提供了一种驱动方法。图10(b)示出的是银纳米线的旋转角速度与点P振动位移的关系,在驱动中,振幅只需数十纳米。
关于这部分工作的更多内容,可参阅文献[1,5]。这一技术的潜在应用包括微纳米生物样品的穿刺、微纳机械装配、纳米材料的性能测试等领域。

图9 银纳米线绕其中点旋转的角位移和角速度与驱动时间的关系Fig.9 Angular displacement and speed of an Ag NW rotating around the center of itself versus driving time

图10 银纳米线绕其中点旋转的角速度与工作频率和电压以及振动位移的关系Fig.10 Dependence of angular speed of a nanowire rotating around the center of itself on the operating frequency and voltage
3 纳米物质的超声聚集
图11(a)所示的是用于聚集纳米线和纳米颗粒的超声台的结构和尺寸,该台包含一片硅基板和通过导电粘合剂粘贴在硅基板上的压电圆环。圆形硅基板的直径为50.8 mm,厚度为0.5 mm。同轴粘贴的压电圆环内径为16 mm,外径为38 mm,厚度为3 mm,其极化方向为厚度方向,压电常数d31为-145×10-12C/N,d33为325×10-12C/N,机电耦合系数kp为0.59,机械品质因数Qm为2 000,介电损耗系数tanδ为0.3%,密度为7 700 kg/m3。在其中的一个实验中,银纳米线悬浮液的浓度为0.01 mg/ml,滴在超声台的中央。超声台的夹持方式如图11(b)所示,在压电圆环上施加交流电压以产生机械振动。利用激光多普勒测振仪POLYTEC PSV-300F测量了超声台的面外振动,其在60 V的工作电压(峰峰值)下的共振频率为21.3 k Hz,所得到的振动模态见图12,可以看到在台中心的位置O(x=0,y=0)有一个振动峰,另外,超声台的振动模态基本上中心对称。通过扫描电子显微镜观察到的银纳米线如图13所示,其直径约100 nm,长度约30μm,在试验中,银纳米线是分散在去离子水中。

图11 实验装置Fig.11 Experimental setup
当超声台的工作频率约为21.3 k Hz、中心点o(x=0,y=0)的振动速度幅值大于112 mm/s(0-p)时,液滴中的银纳米线向硅基板的中央移动并形成点状聚集。图14表示当工作频率为21.3 k Hz、中心点o的振动速度为144 mm/s(0-p)时,40μL的液滴中的银纳米线的点状聚集。图14(a)表示在声处理前不存在银纳米线的斑点;图14(b)示出的是15 min声处理后点O处存在银纳米线斑点;图14(d)表示液滴自然蒸发(不使用超声)后,银纳米线斑点依然存在。图14(a),(b)和(d)通过相机Canon EOS 550D拍摄得到,图14(c)和(e)通过显微镜(VHX-1000,Keyence)拍摄得到,分别是图14(b)和(d)中斑点的放大图像。在液滴自然蒸发前后斑点的直径几乎没有改变。斑点的直径和厚度分别为204和40μm,斑点并不是完整的圆形,最长比最短轴有5%的长度差。文中使用最短轴长作为斑点的直径。斑点的厚度可以通过聚焦距离的改变而测得。同样可以观察到:当超声台的工作频率为21.3 k Hz,中心点o的速度幅值大于19.6 mm/s(0-p)并小于70 mm/s(0-p),银纳米线移动到中点非常缓慢,耗时超过1 h才能形成斑点。然而在这种情况下,银纳米线可以旋转到径向(指向台中央的方向),并最终在少于15 min内沿径向排列好。
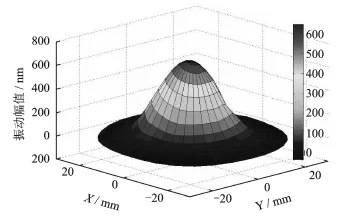
图12 在21.3 k Hz下测得的超声台的振动分布图Fig.12 Measured vibration displacement distribution of the ultrasonic stage at 21.3 k Hz

图13 扫描电子显微镜下的银纳米线Fig.13 Ag NWs under a SEM(scanning electron microscope)

图14 银纳米线斑点的形成Fig.14 Formation of the spot of Ag NWs
图15表示40μL液滴中的银纳米线的取向排列,此时的工作频率为21.3 k Hz,中点o振动速度为42 mm/s(0-p)。图15(a)表示15 min声处理后,液滴中点O附近的银纳米线;图15(b)表示图5(a)的液滴自然蒸发后点o附近的银纳米线;图15(c)表示15 min声处理后,液滴中的点(r=1 mm,θ =210°)处的银纳米线;图15(d)表示图15(c)液滴自然蒸发后,点(r=1 mm,θ=210°)附近的银纳米线。

图15 银纳米线的径向排列Fig.15 The radial alignment of Ag NWs
基于观察和有限元法计算[6,10]得知:由于如图12所示的超声台的振型,液滴中会产生如图16所示的声学流场。这一流动模式可以很好解释纳米物质斑点的形成。纳米物质会被径向声学流带到台中央。当轴向的声学流不是太强时,由于重力的作用,纳米物质不能随着声学流继续往上升,进而在台中央形成斑点状的聚集。
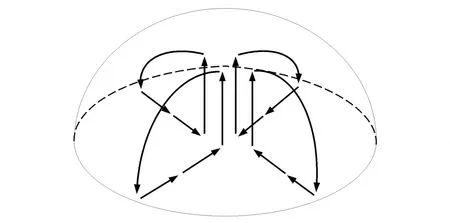
图16 液滴中的声学流图案Fig.16 Acoustic streaming pattern in the droplet
图17(a)表示银纳米线斑点的半径和厚度随着声处理的时间增加而增加的实测关系。试验中,声处理时间足够长时,斑点的尺寸不再发生明显的变化。说明径向声学流能影响到的银纳米线都已经聚集到超声台的中央位置。图17(b)为银纳米线的聚集过程,每张相邻图片之间的时间间隔为1 min。
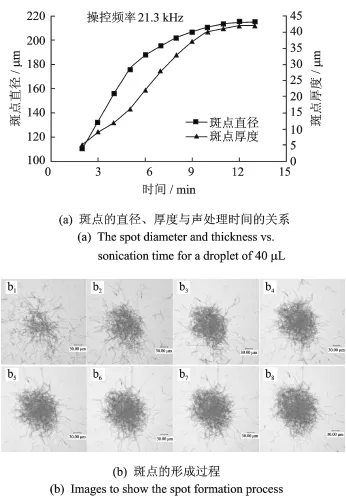
图17 斑点的形成Fig.17 Formation of the spot
在上述方法中,超声台作为基板,工作时处于振动状态。为了扩大这一技术的应用范围,笔者的团队还成功研制了基于超声针的纳米物质聚集方法[6],该方法无需对基板进行励振。利用该方法,已成功获得纳米物质的叶片状和直线状聚集物。关于上述研究工作的更多内容,可参阅参考文献[1,6-7]。
4 结束语
超声纳米操控是由超声学、纳米工程与驱动技术相互交叉而产生的一项新技术,是对纳米尺度物体进行受控作动的一种新手段。它利用的是超声非线性效应如声学流所产生的力。
虽然超声波已初步展示了其在纳米操控方面的能力,国内外对超声纳米操控的新原理、新功能、器件结构设计、器件与声学流场的建模分析、性能优化以及系统集成等的研究还比较少。对这些内容开展深入广泛的研究,将有效提升超声纳米操控技术的水平,并助推其在相关新兴产业中的应用。
在宏观物体的作动(如电机驱动)方面,已有100多年的研发历史与技术积累,技术相对成熟。但在微观物体的作动(如微/纳物体的操控)方面,只有十几年的研发历史,还有大量的科学与技术问题需要探索和解决。最近出现的超声纳米操控技术提供了一种对纳米物体进行受控操作的新方法,它的发展必将强化人类对微观世界的研究能力并为相关产业的发展提供技术支撑。
[1] Hu Junhui.Ultrasonic micro/nano manipulations[M]. Singapore:World Scientific Press,2014:1-7.
[2] Li Ning,Hu Junhui,Li Huaqing,Mobile acoustic streaming based trapping and 3-Dimensional transfer of a single nanowire[J].Applied Physics Letters,2012,101(9):093113.
[3] Balk A L,Mair L O,Mathai P P,et al.Kiloherz rotation of nanorods propelled by ultrasound,traced by microvortex advection of nanoparticles[J].ACS Nano,2014,8(8):8300-8309.
[4] Li Huaqing,Hu Junhui.Noncontact manipulations of a single nanowire using an ultrasonic micro-beak[J]. IEEE Transactions on Nanotechnology,2014,13(3):469-474.
[5] Li Ning,Hu Junhui.Sound controlled rotary driving of a single nanowire[J].IEEE Transactions on Nanotechnology,2014,13(3):437-441.
[6] Zhou Yujie,Hu Junhui,Bhuyan S.Manipulations of silver nanowires in a droplet on low-frequency ultrasonic stage[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2013,60(3):622-629.
[7] Yang Bujiang,Hu Junhui.Linear concentration of microscale samples under an ultrasonically vibrating needle in water on a substrate surface[J].Sensors and Actuators B,2014,193:472-477.
[8] Ahmed S,Gentekos D T,Fink C A,et al.Self-assembly of nanorod motors into geometrically regular multimers and their propulsion by ultrasound[J].ACS Nano,2014,8(11):11053-11060.
[9] Dai Tingzhen,Hu Junhui.A control system for the ultrasonic 3-DOF micro/nano manipulator[C]∥Proccedings the 2014 Symposium on Piezoelectricity,A-coustic Waves and Device Applications.Piscataway,NJ.08854,US:IEEE Operations Center,2014.
[10]Zhu Pengfei,Hu Junhui.FEM Analyses of Acoustic Streaming in a water droplet at the center of an ultrasonic stage[C]∥Proceedings ths 2012 Symposium on Piezoelectricity,Acoustic Waves and Device Applications.Piscataway,NJ.08854,US:IEEE Operations Center,2014.
[11]Shim J,Je Moon Yun,Yun Taeyeong,et al.Two-minute assembly of prinstine large-area graphene based films[J].Nano Letters,2014,14(3):1388-1393.
[12]Hoogerheide D P,Lu Bo,Golovchenko A.Pressurevoltage trap for DNA near a solid-state nanopore[J]. ACS Nano,2014,8(7):7384-7391.
[13]Galliker P,Schneider J,Poulikakos D.Dielectrophoretic bending of directly printed free-standing ultrasoft nanowires[J].Applied Physics Letters,2014,104(7):073105.
[14]Tang Haixion,Malakooti M H,Sodano H A.Relationship between orientation factor of lead zirconate titanate nanowire and dielectric permittivity of nanocomposites[J].Applied Physics Letters,2013,103(2):222910.
[15]Rahman M H,Sulaiman A H M,Ahmed M R,et al. Finite element analysis of single cell wall cutting by piezoelectric-actuated vibrating rigid nanoneedle[J]. IEEE Transactions on Nnaotechnology,2013,12(6):1158-1165.
[16]Yan Zijie,Jureller J E,Sweet J,et al.Three-dimensional optical trapping and manipulation of single silver nanowires[J].Nano Letters,2012,12(10):5155-5161.

TH73
10.16450/j.cnki.issn.1004-6801.2015.02.023
胡俊辉,男,1965年8月生,博士、长江学者特聘教授、博士生导师。主要研究方向为超声压电作动技术。曾发表《Ultrasonic micro/nano manipulations》(Singapore:World Scientific Press,2014)等论著。
E-mail:ejhhu@nuaa.edu.cn
*国家自然科学基金资助项目(91123020);机械结构力学及控制国家重点实验室资助项目(0310G01,0314G01);南京航空航天大学引智基地资助项目(S0896-013);江苏优势学科建设项目(B12021,PAPD)
2015-01-28;
2015-02-20
