蛇形仿生机器人的转弯运动控制方法
2015-11-01王超邓宏彬彭演宾李东方赵娜
王超 邓宏彬 彭演宾 李东方 赵娜
蛇形仿生机器人是一种多关节、高冗余、无肢结构的仿蛇机器人,具有运动稳定、运动形式多变、环境适应力强等优点,在战场突袭、救灾搜救、险境探测等许多领域都具有广泛的应用前景[1].从1972年Tokyo Tech的Shigeo Hirose研制出第1台蛇形机器人ACM III[1,2]至今,相继有数十台蛇形机器人样机问世.
在蛇形仿生机器人行进当中,必然会遇到不可逾越的障碍物或者运动方向与目标之间有一定角度的情况,这就要求机器人能根据自身结构和当前环境作出方向调整,绕开障碍物或者调整方向对准目标前进.目前,对蛇形仿生机器人的运动控制研究都集中在运动规划及其在控制上的实现,但国内外对于蛇形仿生机器人的转弯运动控制研究见诸文献较少.与传统的工业机器人相比,蛇形仿生机器人没有固定的基坐标,运动过程中关节转矩与转角有关,是具有非完整约束的动力系统,并且其关节数较多、长度都较大,使其运动学、动力学建模比串联机器人复杂得多[3].
本文针对蛇形仿生机器人的转弯控制这一问题,基于蛇形曲线的蛇形仿生机器人运动控制,提出了4点判断转弯控制方法优劣的准则,分析了常用的3种转弯控制方法:中心值控制法、相位控制法[4]和幅值控制法[4−5]的优缺点,并基于相位控制法出现转弯角度不连续的缺点提出了切线控制法,进而基于切线控制法和幅值控制法各自的优缺点提出了组合控制法,解决了蛇形仿生机器人转弯过程中和转弯后充分保持蛇形曲线、转弯角度受幅值限制、不连续等问题,转弯更准确、转弯时间更短、效果更明显;最后,介绍了蛇形仿生机器人的实验室样机,并将几种转弯控制方法在样机上进行了实验.
1 转弯控制的提出
蛇形仿生机器人可通过采集蛇头的运动信息来不断调整各关节转动速率以保障仿生蛇的直线前进,但绝对的直线前进是不可能的,其在运动过程中,由于滑动的原因必然产生偏离原路径的运动,或者由于环境和任务的需要而执行某种偏转运动.因此,对蛇形仿生机器人进行转弯控制是十分必要的,这包括转弯方向和转弯角度两个方面的控制.
1.1 转弯的运动基础
蛇形曲线[6]是日本东京工业大学Hirose教授针对蛇的蜿蜒运动提出的,并经由马书根[7]等人进行大量的蛇形机器人试验,证明了该曲线使得蛇形仿生机器人运动效率高、波形连续[7].
蛇形曲线的曲率方程为ρ=−αbsin(bs),其中α为幅值角,b为比例常数,s为蛇形曲线长度,如图1所示.
根据曲率方程可推导出各个关节角关于时间的函数为:

其中:A=−2αsin(bl)为幅值,l为蛇形机器人单元长度;ωt=bs,其中ω为角速率;β=2bl为相邻关节间相位角;i=1,2...n.
蛇形曲线给出了蛇形仿生机器人在做蜿蜒运动时各关节角度随时间变化的数学表达,实际上蛇形曲线并不局限于蜿蜒运动,它的其他运动方式都可以将蛇形曲线作为基础进行演化,包括对蛇形仿生机器人的转弯控制.
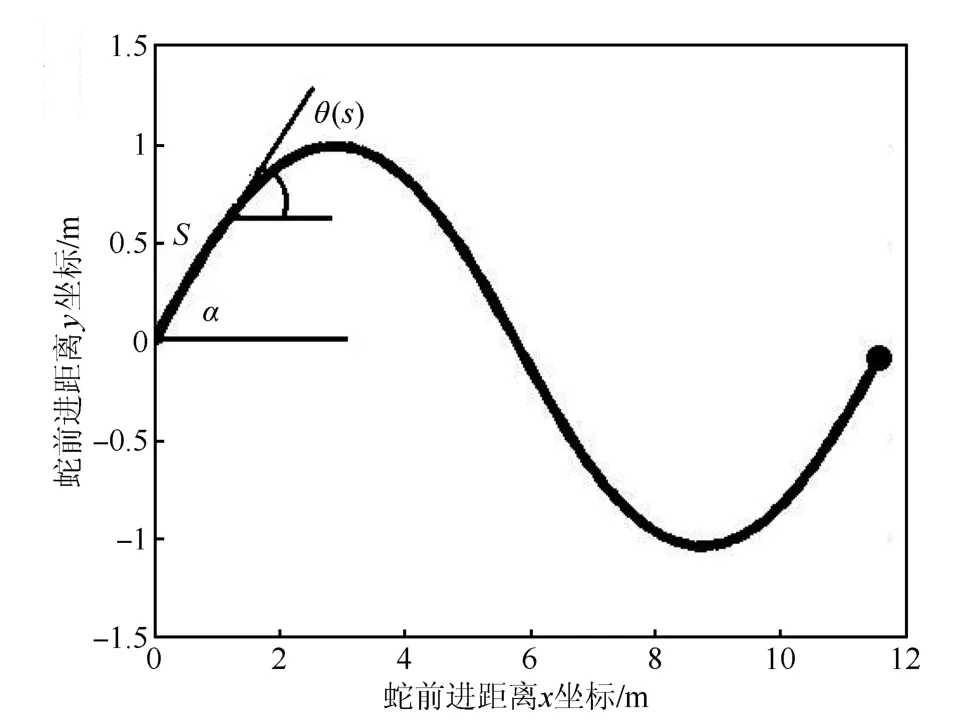
图1 蛇形曲线
1.2 优劣评判准则
根据蛇形曲线的表达式可知,可通过改变3个曲线参数来控制转弯:中心值、相位和幅值[4].通过改变这3个参数的控制方法都可以实现转弯,但是每种控制方法都有它的优劣,所以我们提出了几点判断转弯控制方法优劣的准则.
1)继承蛇形曲线的程度
蛇形曲线是蛇形仿生机器人运动的基础,为了保持蛇形仿生机器人高效率的运动,无论在转弯时还是转弯后机器人要能够保持基于蛇形曲线的运动方式.否则,会导致整个控制系统的紊乱,主控制器不得不重新处理,加重了系统负担.
2)关节角度的连续性
蛇形仿生机器人是一种多关节的、高冗余、无肢机器人,其无论是转弯运动还是直行运动都是依靠各关节电机的转动使得关机角度不断发生改变,继而完成波的传递向前运动.因此,蛇形仿生机器人在直行、转弯时,电机转动的角度变化应是连续的.电机角度突变会造成电机负载增大,对供电系统、散热部件都会带来压力;同时,也会增大机器人局部抖动,对仿生蛇的受力情况造成不利影响,影响系统的运动稳定性和系统寿命.
3)转弯效果及准确性
参照普通机器人的转弯控制,蛇形仿生机器人在转弯控制时要控制简单、转弯快、转弯效果明显且转弯角度准确,其中,转弯角度准确是第一位的.准确转弯可以大幅度减少甚至消除转弯后的其他辅助操作,如恢复之前的运动转态、转弯角度的纠正等.
4)转弯时关节角度变化的幅值
无论采取何种转弯控制方法,本质上都是改变各个关节角度的变化规律,这必然会导致关节角度变化的幅值发生改变.关节角度变化的幅值过大,关节运动惯性增大,会影响相邻关节的运动,给整个系统稳定性带来不利影响.因此,关节角度变化的幅值不易过大.
2 常用转弯控制方法
2.1 中心值控制法
中心值控制的数学表达为

式中:c为比例常数,用来改变蛇形曲线的形状,从而实现转弯运动;sz(s>sz)为转弯前蛇形仿生机器人的运动距离.
转弯角度为

经过一系列仿真计算,可以知道中心值控制法的优点是转弯时关节角度变化连续,转弯效果明显,能在较大范围内持续转弯,并能实现圆周运动,如图2所示;缺点是转弯时没有充分保持蛇形曲线,转弯时存在明显的转弯半径,转弯时间较长,关节角度变化的幅值较大,如图3所示.

图2 不同中心值调整因子的蛇形仿生机器人运动轨迹
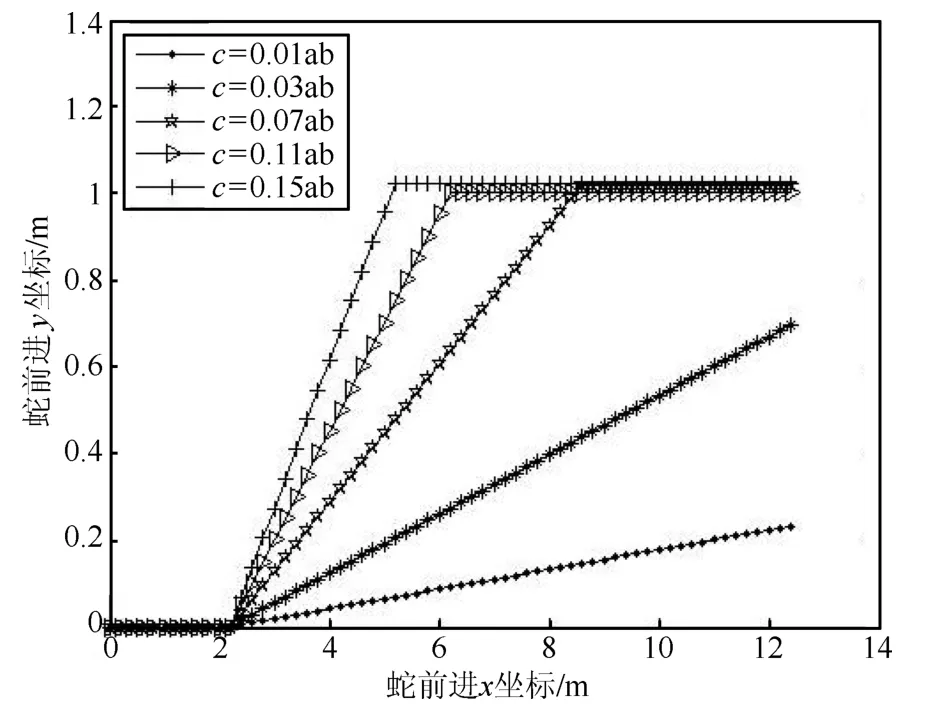
图3 不同中心值调整因子切线角度对比
2.2 相位控制法
相位控制法数学表达为

其中,σ为相位调整因子.
如图4所示,相位控制法的优点是转弯过程中和转弯后仿生蛇都能充分保持蛇形曲线,转弯准确、转弯半径小、转弯时间短、转弯效果明显;缺点是转弯时会出现两次关节角度不连续的情况,并且转弯角度越大,角度突变越大,如图5所示.基于相位控制法的转弯运动应用较为广泛[3].
2.3 幅值控制法
幅值控制法的数学表达为

转弯角度为

其中:Lx、Ly分别为一个周期内蛇头前进的x和y方向的位移.

图4 不同转弯角度的蛇形仿生机器人运动轨迹

图5 不同转弯角度的角度变化对比
如图6、图7所示,幅值控制法的优点是转弯过程中和转弯后仿生蛇都能充分保持蛇形曲线,转弯时关节角度连续,转弯较准确,有多次转弯角度调节机会;缺点是转弯角度受到限制,转弯半径大、转弯时间长.
3 优化转弯控制方法
3.1 优缺点对比
前面介绍的3种控制方法各自的优缺点如表1所示.
通过表1可以发现,上述3种方法的优缺点是互补的,例如相位控制会导致关节角度的不连续,而中心值控制法和幅值控制法则不存在这个问题;又例如中心值控制法和幅值控制法的转弯角度并不十分准确,相位控制法则转弯角度很准确,控制起来也很方便.
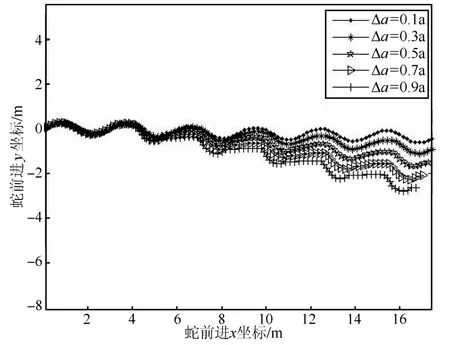
图6 不同∆α下蛇形仿生机器人运动轨迹

图7 不同∆α的切线角度变化
3.2 切线控制法
切线控制法是在相位控制法的基础上,为了弥补相位控制出现的转弯角度不连续的缺点而提出的.由式(4)可知,若要保持转弯角度连续,则在转弯处,蛇形曲线的切线必须相同,有

即

为保证式(8)有解,φ<α,即切线控制法下转弯角度是受幅值限制的.因此,对于确定的蛇形曲线,采用切线控制法只能实现有限角度下的转弯,无法实现大幅度转弯.
切线控制法下,蛇形仿生机器人转弯的运动轨迹如图8所示.可以看出,采用切线控制法,转弯准确,转弯角度连续且可以保证转弯后依然保持蛇形曲线.
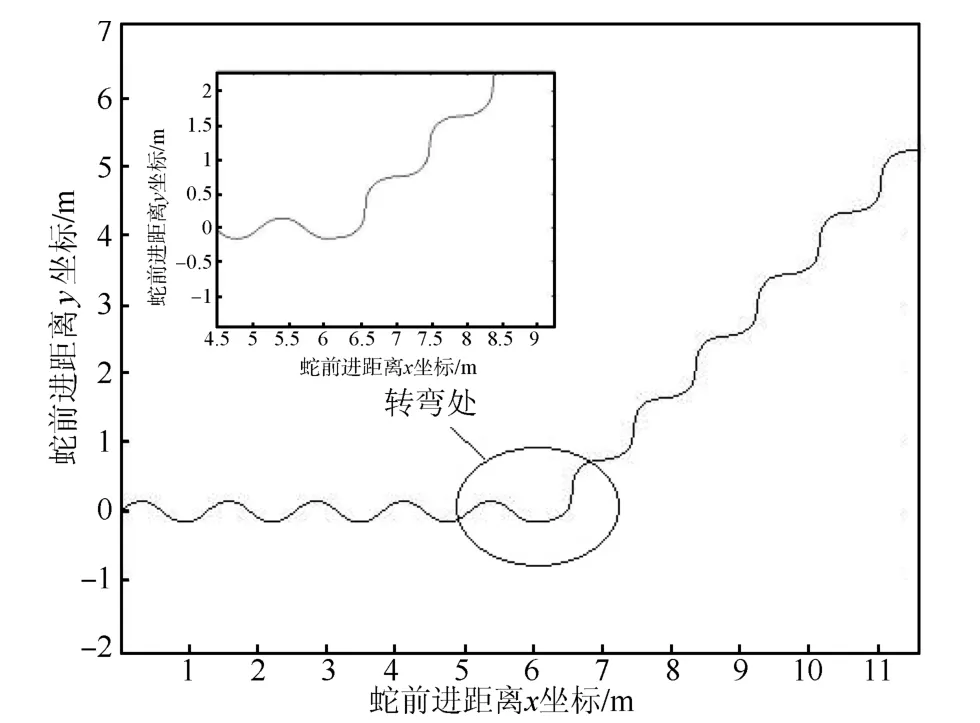
图8 切线控制下蛇形仿生机器人的转弯轨迹
切线控制法与相位控制法下蛇形仿生机器人的转弯轨迹如图9所示,二者都能实现准确的转弯角度,不同的是,切线控制法在转弯处的关节角度是连续的,相位控制法在转弯处出现明显的两次突变,如图10所示.
在转弯角度条件允许的情况下,可以选择切线控制法控制蛇形仿生机器人的转弯运动;如果转弯角度φ>α,也可以采取切线控制法,只不过在转弯控制前必须将系统幅值α增大到合适值,即先进行变幅值操作.为保证曲线连续性,缓解电机压力,需要在角度变化率为0时,进行变幅值操作.

表1 3种控制法对比表
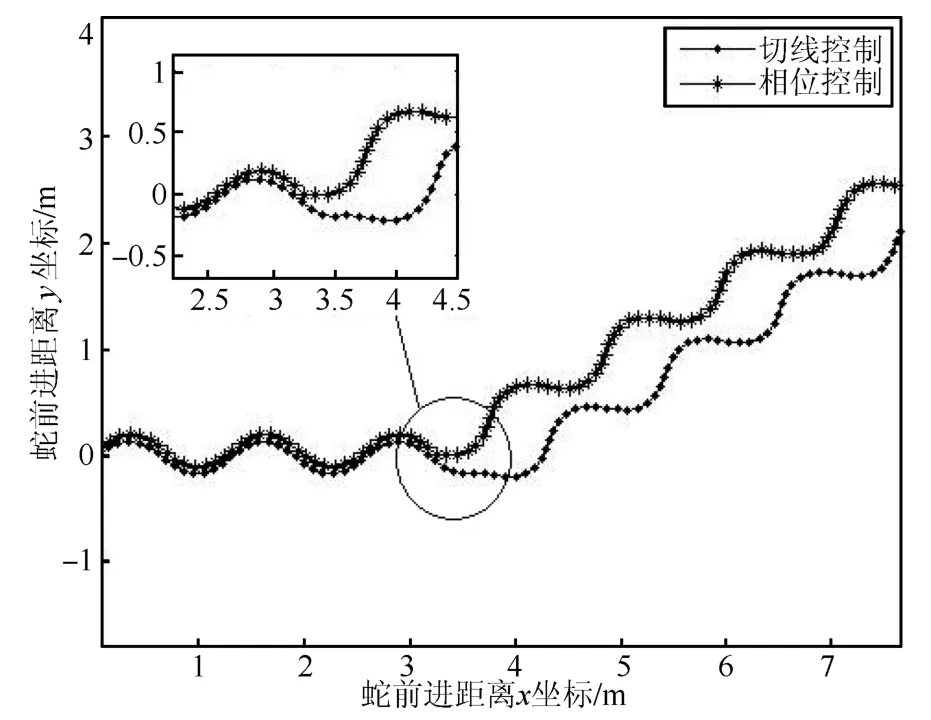
图9 切线控制和相位控制下蛇形仿生机器人运动轨迹对比

图10 切线控制与相位控制下转弯角度变化对比
变幅值后,蛇形仿生机器人运动轨迹如图11所示.此轨迹明显分为了3段,A段为变幅值前的蛇形轨迹,此时幅值较小;B段为变幅值后的蛇形轨迹,此时幅值变大,为后面的切线控制法下的转弯做准备;C段为转弯后的蛇形轨迹.可以看出,变幅值操作不会影响机器人运动方向,并且关节角度保持连续.完成转弯后,减小系统幅值使得蛇形曲线中波的个数减少,机器人前进速度加快.

图11 变幅值切线控制法下蛇形仿生机器人运动轨迹
取系统初始幅值α=π/6,如图12所示,每一种情况下的转弯角度都很准确,转弯半径小,效果明显.系统根据不同的转弯角度选择是否进行幅值变换.例如,当φ=15◦时,满足φ<α,无需变幅值即可直接进行切线控制法转弯;当φ>α时,则在切线转弯之前要进行变幅值操作,如当φ=35◦时,在转弯前先将系统幅值增为α2=50◦,然后再进行切线控制法转弯;而当φ增至55◦,此时进一步增大系统幅值α2=70◦再进行转弯控制.
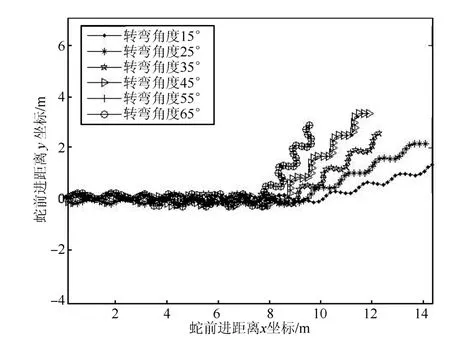
图12 切线控制下不同转弯角度的蛇形仿生机器人运动轨迹
如图13、图14所示,无论是在变幅值还是切线控制转弯的过程中,关节角度变化始终是连续的.故在切线控制的基础上进行变幅值操作可以扩大可转弯角度的范围,增强切线控制法的适用性.
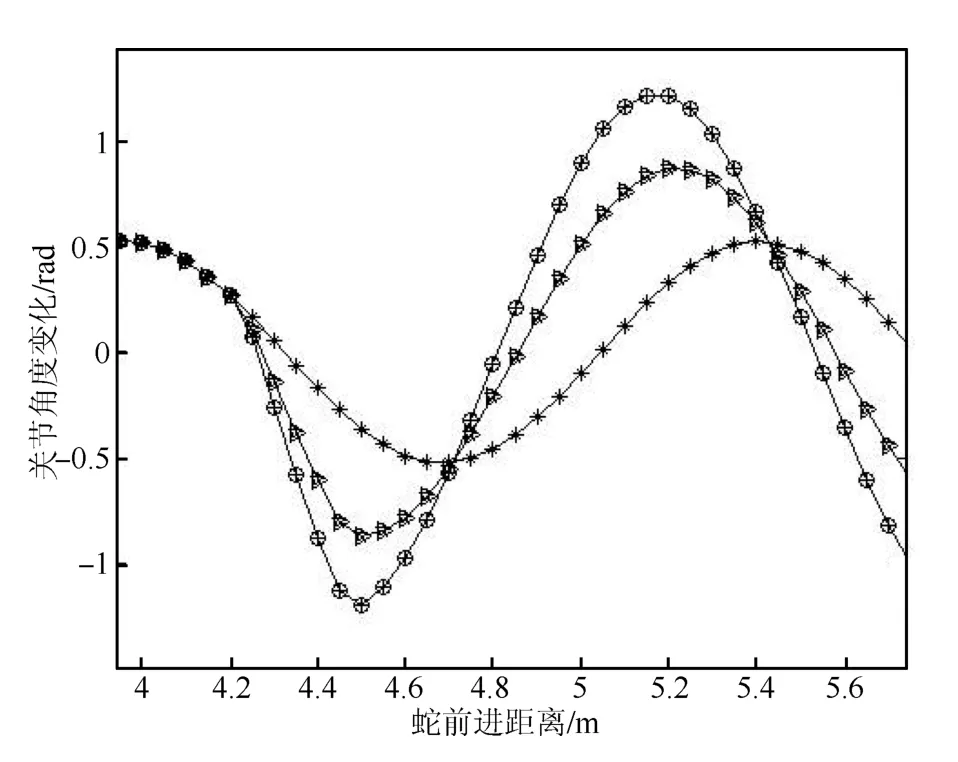
图13 增幅值处关节角度变化

图14 切线转弯处关节角度变化
3.3 组合控制法
从图11可以看出,变幅值操作实际上增加了机器人的转弯时间;同时,大的系统幅值会严重影响蛇形仿生机器人的运动稳定性.完成转弯运动后,还需再次进行变幅值操作以加快机器人运动速度,增加了系统负担.
因此,为了克服变幅值操作带来的缺点,我们引入了幅值控制法.
首先,在这里提出一个幅值调整因子ζ(ζ>0),有

其中:α1为初始幅值,α2为调整后的幅值.
为保证变幅值后关节角度变化的连续性,有

其中:sf为变幅值时刻,蛇形仿生机器人的运动距离.变幅值时刻选在曲线切线角度变化率最大处.
当蛇形仿生机器人蛇头的方向运动到所需φ时,利用切线控制法,进行转弯运动,有

其中:α1<φ<α2,sz为转弯时刻蛇形仿生机器人的运动距离.
此时,有

由式(12)可以看出,在进入转弯时,同时进行了系统相位、幅值的改变.在转弯处有

故θ(s)在转弯处是连续的,有

由式(14)可以知道,采用组合控制法克服了切线控制法转弯角度受到限制的缺点,保留其全部优点,转弯准确并做到了关节角度变化处处连续.
取α1=30◦,ζ=1.4,φ=45◦,如图 15 所示,由于φ>α,所以在转弯过程中同时进行了增减幅值和转弯的操作,并且在一个系统周期内同时完成,转弯时间少,转弯半径小,保留了切线控制法的转弯优势;完成转弯的同时,系统的运动状态如幅值等参数恢复到原始状态,系统不必再进行调整,减轻了系统负担.

图15 组合控制法下的蛇形仿生机器人运动轨迹(A处增幅值,B处减幅值并转弯)
如图16所示,分别利用组合控制法实现4个转弯角度的转弯运动,转弯时,蛇形仿生机器人先进行变幅值操作,等蛇头转到所需转弯角度时,将系统幅值恢复原始状态并进行转弯,完成转弯后继续向前运动,转弯准确,效果明显.如图17所示,采用组合控制法机器人在1/4个周期内就完成了转弯运动;从关节角度的变化可以看出,与变幅值切线控制法相比,系统恢复到转弯前的状态更快捷简单,系统更稳定.
综上所述,组合控制法转弯过程中和转弯后仿生蛇都能充分保持蛇形曲线,转弯准确、转弯时间短、转弯效果明显,并且转弯角度可以不受到限制,转弯时会关节角度始终连续,相较其他的控制方法有明显的优势.

图16 组合控制下不同转弯角度的蛇形仿生机器人运动轨迹
4 样机实验
4.1 蛇形仿生机器人结构
实验室蛇形仿生机器人样机采用模块化设计,如图18所示,其整体机械结构由一系列相同模块串联而成,相同模块之间采用十字型万向节连接,每个关节的两个自由度上各安装一个直流电机和一个位置传感器,模块外缘均布几个从动轮,减小与地面的摩擦;控制系统采用基于RS422总线式结构的上位机—关节控制器双层控制,如图19所示,每个关节控制器控制相应关节的两个直流电机.上位机实时计算各关节转动角度,将命令下发到总线上,各关节控制器通过协议解析获取自己的转动角度命令,继而驱动相应自由度上的电机转动,位置传感器实时将关节角度变化反馈给关节控制器,达到位置闭环控制的目的;同时关节控制器将关节角度变化上传到总线,发送给上位机,上位机就可以实时计算蛇形仿生机器人的当前姿态.
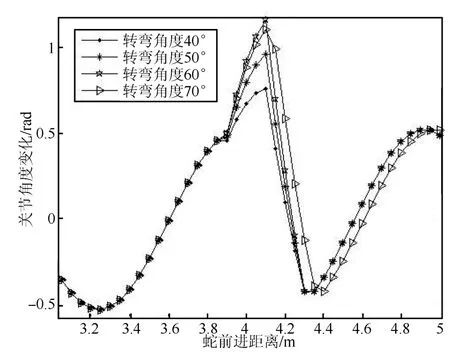
图17 组合控制法下转弯处关节角度变化

图18 蛇形仿生机器人机械结构
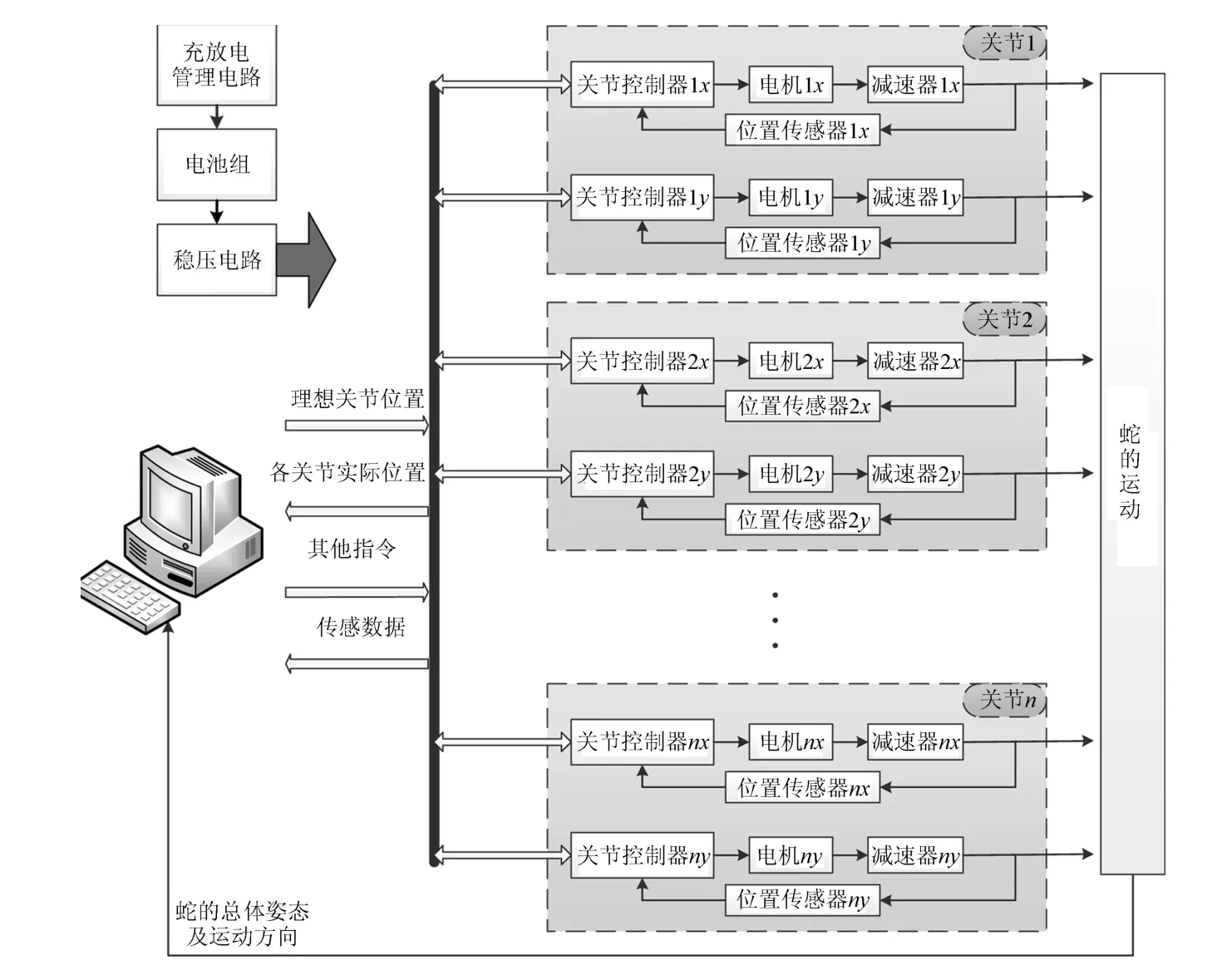
图19 蛇形仿生机器人控制系统结构
4.2 转弯实验
利用上位机软件分别将中心值控制法、相位控制法、幅值控制法、切线控制法和组合控制法应用到蛇形仿生机器人样机的转弯运动中,如图20所示.从实验中,我们发现,5种转弯控制方法都能实现蛇形仿生机器人的转弯运动,中心值控制法转弯时机器人转弯角度不准确,关节角度变化幅度大,导致机器人抖动;相位控制法转弯时由于关节角度有明显的突变,造成了机器人各关节先后出现抖动现象;幅值控制法转弯半径较大、时间较长;切线控制法转弯时平滑过渡,在整个转弯过程中机器人运动稳定,没有出现关节角度突变的情况;组合控制法转弯时平滑过渡,转弯半径和时间较幅值控制法明显减小,在实现大幅度转弯的情况下效果明显.
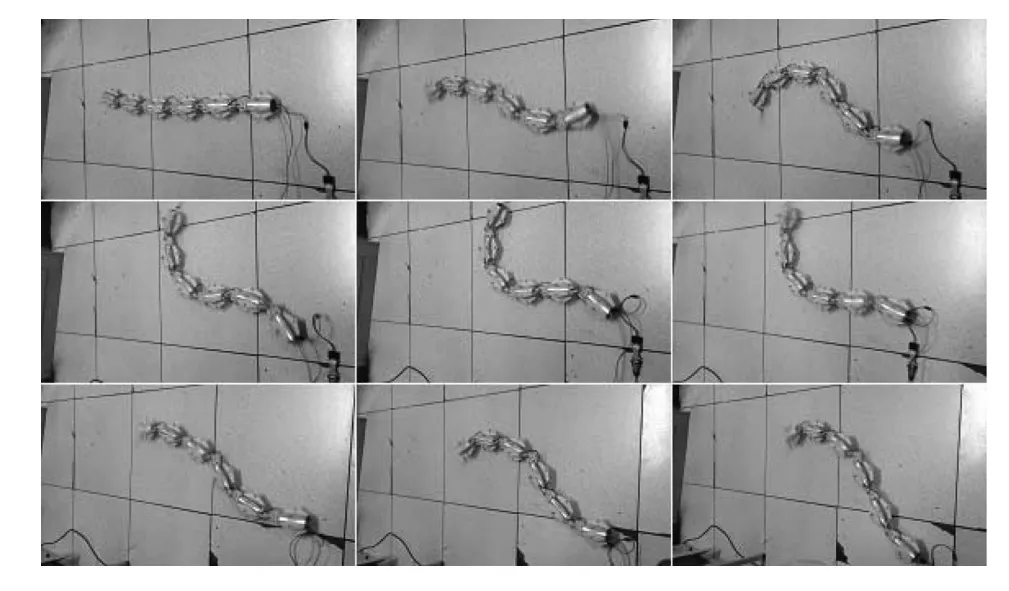
图20 组合控制下蛇形仿生机器人的转弯运动
5 结论
本文针对蛇形仿生机器人的转弯运动控制问题,通过分析蛇形曲线,得出了判断转弯控制方法优劣的4点准则,对常用的3种转弯控制方法进行改进和优化,提出了切线控制法和组合控制法,解决了蛇形仿生机器人转弯过程中和转弯后充分保持蛇形曲线、转弯角度受幅值限制、不连续等问题,并在蛇形仿生机器人样机上进行了试验.结果证明,组合控制法转弯时间短、转弯角度准确、效果明显,对基于蛇形曲线的蛇形仿生机器人的转弯运动控制有重要意义.
这项工作获得了国防基础科研和总装预研支撑计划的大力支持,在此表示衷心的感谢!