一种新型空间对接抓捕机构的设计与分析
2015-10-31原永亮
原永亮,杨 臻,邱 枫
(1.中航光电科技股份有限公司,洛阳 471000;2.中北大学 机电工程学院,太原 030051)
一种新型空间对接抓捕机构的设计与分析
原永亮1,杨 臻2,邱 枫2
(1.中航光电科技股份有限公司,洛阳 471000;2.中北大学 机电工程学院,太原 030051)
文章设计一种新型抓捕机构,不仅具有结构简单、末端速度可控等优点,而且可减小两卫星抓捕过程中产生的碰撞力。基于抓捕机构的工作原理,使用CATIA软件建立了三维模型,并运用ADAMS仿真软件进行仿真分析,得到其运动规律和动力学曲线;使用ABAQUS有限元软件对抓捕机构中的软轴进行受力分析。仿真与有限元分析结果表明:与美国ASDS-Ⅱ相比,该机构的角度容差更大,更容易实现对卫星的捕获。
空间对接;抓捕机构;ADAMS软件;ABAQUS软件
0 引言
空间交会对接时,需使用导航和测试系统获取空间飞行器的高精度位置和速度信息[1],以实现理想的对接效果。国内外学者在这方面做了许多研究。美国在空间交会对接方面取得了最新成果,其ASDS-Ⅱ交会对接产品采用软轴柔性对接技术,它比AMDS对接机构有更多优势。
本文在调研的基础上设计一种软轴旋转式抓捕机构,并使用 ADAMS动力学仿真软件以及ABAQUS有限元分析软件进行深入分析,以掌握机构的运动规律和受力情况。仿真与有限元分析结果可对以后的改进优化和工程设计提供参考。
1 抓捕机构的设计
1.1工作原理
飞行器的抓捕过程如图1所示。当目标飞行器在捕获范围内,控制系统发出延伸指令,在主电机的驱动下,抓捕机构的软轴开始快速前伸;在距离目标飞行器1 m时,软轴减速至0.1 m/s并缓慢地插入对接机构的中心锥;当软轴伸至锁定位置之后,辅助电机开始工作,使软轴旋转60°,然后软轴前段与凸轮配合,使凸轮再旋转3°,完成锁紧;之后,主电机开始反转,将软轴和目标飞行器回收,完成抓捕工作。

图1 抓捕机构工作原理Fig.1 The working principle of the capture
1.2软轴的设计
为了保证抓捕后的可靠锁紧,软轴式对接抓捕机构采用了软轴与凸轮锁相配合的锁紧方式,而软轴和凸轮锁的合理设计是本方案的技术难点。
软轴的前段是柔性体,后段是刚性体。在回收过程中,软轴后段的刚性轴可以对飞行器的姿态起到一定的限位作用。因此,通过刚性体和柔性体的组合,既能有效解决2个飞行器之间位置和角度的容差问题,又能有助于抓捕收回过程的稳定性。软轴的结构和主要尺寸如图2所示。
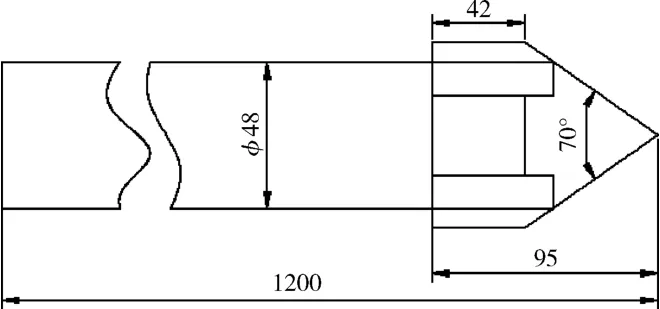
图2 软轴的尺寸Fig.2 The size of the soft shaft
1.3 凸轮锁的设计
软轴缓慢地伸入飞行器的中心锥之后,软轴前段的球面与凸轮锁配合,进而将软轴锁紧。因此,可靠的锁紧是保证飞行器在回收过程中不脱出的关键因素。凸轮锁的结构与尺寸设计如图3所示。
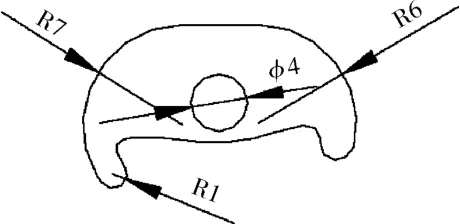
图3 凸轮锁的结构与尺寸Fig.3 The structure and sizes of the CAM lock
2 ADAMS动力学仿真
在完成结构设计之后,为了掌握其工作运动规律和软轴的受力情况,需要开展动力学仿真。
动力学仿真的初始条件:
1)服务飞行器质量2850 kg;
2)目标飞行器质量2000 kg;
3)2个飞行器相对位置容差≤100mm;
4)2个飞行器相对角度容差≤15°;
5)2个飞行器相对静止。
2.1模型简化与基本假设
影响对接抓捕过程的因素很多,为了简化对接抓捕过程,需作如下假设:
1)ADAMS动力学模型按照实际的运动规律添加约束,其模型不考虑各种误差;
2)除了软轴前段的柔性体部分有变形外,其余零部件均作为刚体处理。
2.2 建立动力学模型
利用CATIA软件对对接抓捕机构进行三维建模。然后将模型经过文件类型的转换,导入到ADAMS仿真软件中。根据机构在实际工作中的情况,添加材料的材质和约束,并设置变量参数,最后完成动力学仿真模型的建立。
2.3 仿真分析
工作在太空中的飞行器即使受到微小的力,也会产生较大的位移。因此,2个飞行器的接触力和位移将是我们最关心的数据。软轴在不同速度下的接触力和位移如表1所示。
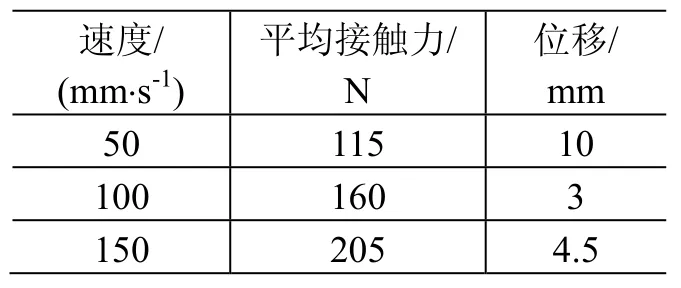
表1 软轴在不同速度下的接触力和位移Table 1 The contact force and displacement of the soft shaft at different speeds
该抓捕机构主要是利用速度差来完成抓捕的。由表1可以看出,当速度偏小时,位移反而增大,这说明不利于实施抓捕操作;随着速度的增加,接触力随之增大,位移反而减小,有助于完成抓捕;若速度继续增加,不仅接触力增大,而且位移也增大,这就不利于抓捕。经过比较,本文最终决定采用100mm/s的速度进行抓捕。
经仿真分析,锁紧前软轴与中心锥的接触力见图4,锁紧过程中目标飞行器的位移变化见图5。

图4 锁紧前软轴与中心锥的接触力Fig.4 Contact force between the soft shaftand the centre cone before locking

图5 锁紧过程中目标飞行器的位移变化Fig.5 The displacement change of the target vehicle during locking
由图4可以得出,在100mm/s的速度下,锁紧前软轴与中心锥的接触力在160 N左右,目标飞行器向后运动3mm。由图5可以得出,在软轴旋转60°锁紧时,目标飞行器的最大位移为26mm。经过矩阵转化计算,目标飞行器沿轴向旋转了2.7°。
3 ABAQUS有限元分析
在软轴伸出和回收的过程中,飞行器都存在一定的振颤。由于软轴的前段是柔性体,为了确保软轴能伸入中心锥完成抓捕和回收,故对软轴前段的柔性体进行受力分析。
3.1模型的导入
将CATIA建好的模型导入ABAQUS中,其中数据转换方法如下:
1)ABAQUS的6.12版本可以直接打开CATIA文件;
2)通过使用通用格式igs/stp来完成数据的转换。
3.2模态分析
软轴的材料为钛合金,其密度为4.4×103kg/m3,弹性模量为110 GPa,泊松比为0.3。模态分析了比较典型的软轴前10阶振型图,其中选取第8、9阶(如图6和图7所示)进行比对。在第9阶模态下的位移如图8所示。

图6 第8阶振型图Fig.6 The eighth order vibration mode
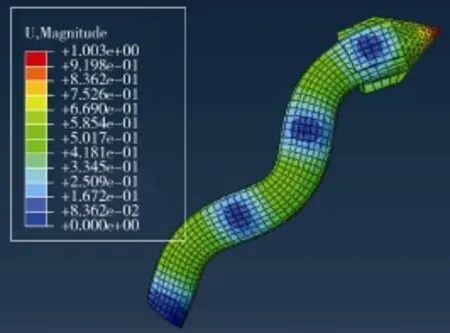
图7 第9阶振型图Fig.7 The ninth order vibration mode

图8 第9阶模态下位移Fig.8 The displacement of the ninth order mode
4 结束语
本机构与ASDS-Ⅱ相比,具有以下特点:
1)该机构的软轴旋转60°之后与凸轮锁配合锁紧,在此过程中,目标飞行器也会有2.7°的转动。因此,该机构的角度容差比ASDS-Ⅱ大,更容易实现对目标飞行器的抓捕。
2)ASDS-Ⅱ抓捕时需要检测接触球面上的压力,为此需要在球面上布置传感器,因而传感器的选型和安装都具有一定难度;而本机构在检测方面更简单、更容易实现。
3)通过ADAMS软件和ABAQUS软件的仿真与分析,进一步验证了机构抓捕的可靠性。
(
)
[1]阳仁贵, 袁运斌, 欧吉坤.相位实时差分技术应用于飞行器交会对接研究[J].中国科学: 物理学 力学 天文学, 2010, 40(5): 651-657 Yang Rengui,YuanYunbin, Ou Jikun.Phase difference technique is applied to real-time spacecraft rendezvous and docking study[J].Chinese Science: Physics,Mechanics, Astronomy, 2010, 40(5): 651-657
[2]Motaghedi P, Stamm S.6 DOF testing of the Orbital Express capture system[J].SPIE, 2005, 5799: 66-81
[3]原永亮, 杨臻, 王圣辉, 等.轮系在翻转机构中的应用与分析[J].包装工程, 2014, 35(17): 86-90 Yuan Yongliang, Yang Zhen, Wang Shenghui, et al.Gear train in the application of reverse institutions and analysis[J].Packaging Engineering, 2014, 35(17): 86-90
[4]Hays A, Tchoryk P, Pavlich J, et al.Dynamic simulation and validation of a satellite docking system[C]//SPIE AeroSense.Orlando, FL, 2003-04-21
[5]袁安福, 陈俊.ANSYS在模态分析中的应用[J].中国制造业信息化, 2007, 36(11): 42-44 Yuan Anfu, Chen Jun.ANSYS in the application of modal analysis[J].China's Manufacturing Industry Informatization, 2007, 36(11): 42-44
[6]王晓雪.非合作目标对接捕获机构的研究[D].哈尔滨:哈尔滨工业大学, 2009: 20-26
(编辑:肖福根)
Design and analysis of a new capture mechanism for space docking
Yuan Yongliang1, Yang Zhen2, Qiu Feng2
(1.CNAC photoelectric Polytron Technologies Inc, Luoyang 471000, China;2.Mechanical and Electronic Engineering College, North University of China, Taiyuan 030051, China)
This paper presents the design of a new type of docking mechanism, with advantages of simple structure, capability of end speed control, simultaneous reduction of the impact forces of two satellites during their adsorption union.First, the principle of the docking mechanism is discussed.And then, a three-dimension model is established by using the CATIA software and it is analyzed using the ADAMS software to obtain the motion pattern and the dynamic curve.At last, the force with the flexible shaft in the catching mechanism is analyzed using the ABAQUS finite element software.Simulation results show that the angle allowance of the new capture mechanism is better than the ASDS-Ⅱ, thus the satellite docking may be implemented more easily.
space docking; capture mechanism; ADAMS software; ABAQUS software
V476
A
1673-1379(2015)06-0626-04
10.3969/j.issn.1673-1379.2015.06.011
原永亮(1989—),男,硕士学位,主要从事结构设计与仿真技术的研究。E-mail:yuan-yong-liang@163.com。
2015-05-14;
2015-07-14
