基于格拉布斯准则的GMM背景建模方法
2015-10-30许宏科秦严严
许宏科,秦严严
(长安大学 电子与控制工程学院,陕西 西安 710064)
随着智能交通系统(intelligent transportation systems,ITS)的进一步发展,基于视频图像处理技术的交通流数据采集与交通行为分析成为热点研究领域[1-3].一方面得益于视频图像处理技术的日益完善和计算机信息处理能力的不断增强;另一方面,视频摄像头的普及以及城市基础设施的完善也为基于视频图像的交通分析提供了设施基础.基于图像处理的车辆检测作为这一热点研究领域中基础而又重要的步骤,受到了学者们的广泛关注[4-6].混合高斯模型(Gaussian mixture model,GMM)具备适应交通环境变化的优点,被广泛应用于车辆检测中[7-8].
然而,GMM的背景建模仅简单地求取初始数帧各像素点处的灰度均值和方差,容易受到初始数帧中行驶车辆前景的干扰,使得建立的初始背景模型中含有大量前景信息,对后续检测步骤造成消极影响.虽然通过增加初始帧的数量(如前500帧)可以基本消除车辆前景的干扰,但同时带来了计算量过大的问题.因此,将初始数帧各像素点处的灰度值看作时间域上的序列值,引入格拉布斯异常值判别准则,剔除代表车辆前景信息的异常灰度值,然后对各像素点处对应的剩余灰度值求取灰度均值和方差,从而建立背景模型.
1 GMM背景建模简介
GMM背景建模即是对各像素点对应的K个高斯函数中均值μ、方差σ2和每个高斯函数的权重wk这3个参数的初始赋值问题.通过对初始N帧图像在各像素点处累计采样,通过求取平均值的方式,利用公式(1)和公式(2)对均值μ和方差σ2进行赋值.在满足所有权重之和为1的条件下,利用公式(3)对权重进行赋值.
由以上公式可以看出,GMM背景建模仅简单地求取初始N帧各像素点的灰度均值和方差,用于对高斯函数中的均值μ和方差σ2的赋值.然而,实际的交通环境下,初始N帧中一般存在行驶车辆,这使得所建立的背景模型包含了大量车辆前景信息,对后续车辆检测造成消极影响.
2 背景建模方法
为了将初始数帧各像素点处的灰度值中代表前景信息的异常灰度值剔除,确保所建立的背景模型无车辆前景干扰,本文引入格拉布斯异常值判别准则,在分析格拉布斯准则原理的基础上,明确适用条件,最终确定背景建模步骤.
2.1 格拉布斯准则原理
将 N 个测量值从小到大排序,用{VV1(x,y),VV2(x,y),…,VVN(x,y)}表示排序后的测量值统计量,针对排序后的数据,总是先怀疑最小或最大的测量值最有可能是异常值.判别步骤如下:
1)选择危险率α.
2)根据下式计算T值.
3)利用格拉布斯系数表[9],查对应于N 和α的T(N,α)值.
4)若T≥T(N,α),则认为该测量值为异常值,予以剔除;否则,若T<T(N,α),则认为不能将该测量值以危险率α剔除.
2.2 适用条件和建模步骤
使用格拉布斯准则时,要求测量值数据服从正态分布.初始N帧各像素点均有N个时间域上的灰度数据值,N个数据之间没有空间位置上的关系,每一个数据可认为是一个测量值.反映前景信息的灰度值可认为是N个测量值中的异常值.各像素点的N个灰度测量值服从正态分布,满足格拉布斯使用的前提.
文献[9]建议,当N≤20时,使用格拉布斯进行异常值判别效果良好,因此,在考虑计算量的情况下,使用初始10帧各像素点信息,进行背景建模,即N=10.
通过格拉布斯准则的判别步骤可以发现,若排序后的异常值在数值较大的一端存在2个及以上(较小一端时原理相同),即VVN(x,y),VVN-1(x,y),…均为异常值,则一次格拉布斯准则判别后,只可剔除VVN(x,y),如若将异常值全部剔除,则需多次格拉布斯准则判别过程.而且根据其判别步骤可知,当VVN-i(x,y)为正常值时,数值较大一端的测量值VVN-i-1(x,y)也为正常值.所以,为了剔除初始10帧中的灰度异常值,需要分别从数值较小一端和数值较大一端,多次进行格拉布斯准则判别.其原理过程如图1所示.
在图1中,取N=10,危险率α=2.5%,经查表[9]得到T(N,α)=2.29.经过图1的程序步骤,得到的{VVV1(x,y),VVV2(x,y),…,VVVk(x,y)(x,y)}为像素点(x,y)处经过剔除行驶车辆干扰后的灰度值序列,其中k(x,y)表示该点处反应背景信息的灰度值个数.最后在每个像素点(x,y)处,根据公式(4)和公式(5),对{VVV1(x,y),VVV2(x,y),…,VVVk(x,y)(x,y)}求灰度均值和方差.

将求得的各像素点的灰度均值μ(x,y)和方差σ2(x,y)作为背景模型中该像素点处高斯分量的均值和方差初始参数值,完成背景建模过程.
3 仿真实验与应用
为了验证基于格拉布斯异常值判别进行背景建模的准确性,对本文背景建模方法和传统GMM背景建模方法做了对比实验,其中的1组仿真结果如图2所示.
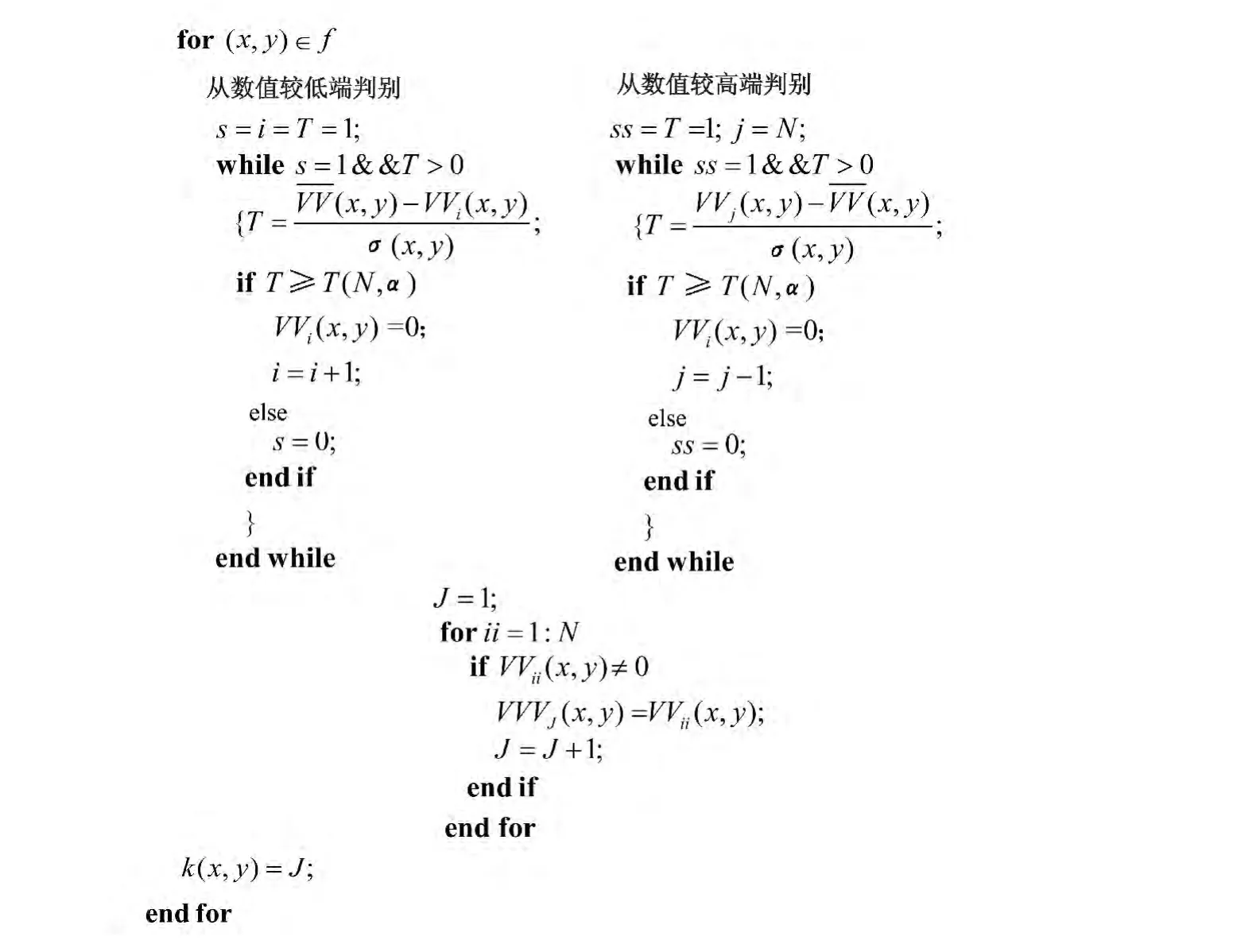
图1 灰度异常值剔除原理
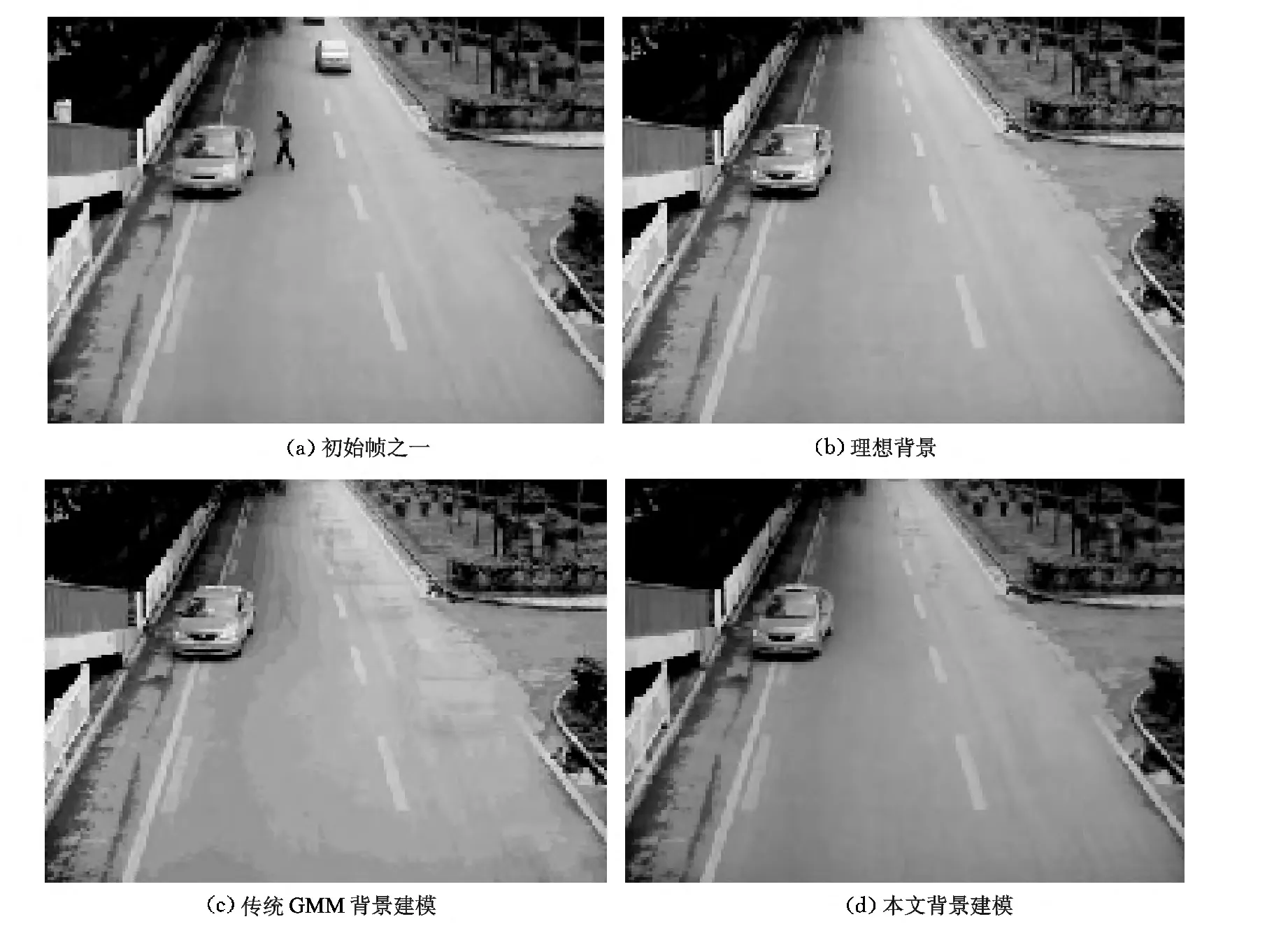
图2 背景建模实验对比
从图2中可以看出,传统GMM直接取平均值进行背景建模会严重受到行驶车辆及其它运动干扰的影响,例如图2(c)中,图像右侧行驶车辆造成的影子、左侧出租车旁边行人运动留下的影子等.相反,本文背景建模方法取得了预期实验效果,从图2(d)中可以看出,虽然图像右上方存在小部分车辆影子,但就整体效果来讲,本文背景建模方法准确度明显高于传统GMM背景建模,基本可满足理想背景模型的要求.
将本文背景建模方法应用于基于GMM的视频车辆检测系统中,取得了良好的实验效果,部分实验结果如图3所示.图3的车辆检测结果建立在本文背景建模方法基础之上,经过系统后续步骤完成.从图3中可以看出,系统最终的检测结果良好,也在一定程度上间接地表明了本文方法的可靠性.
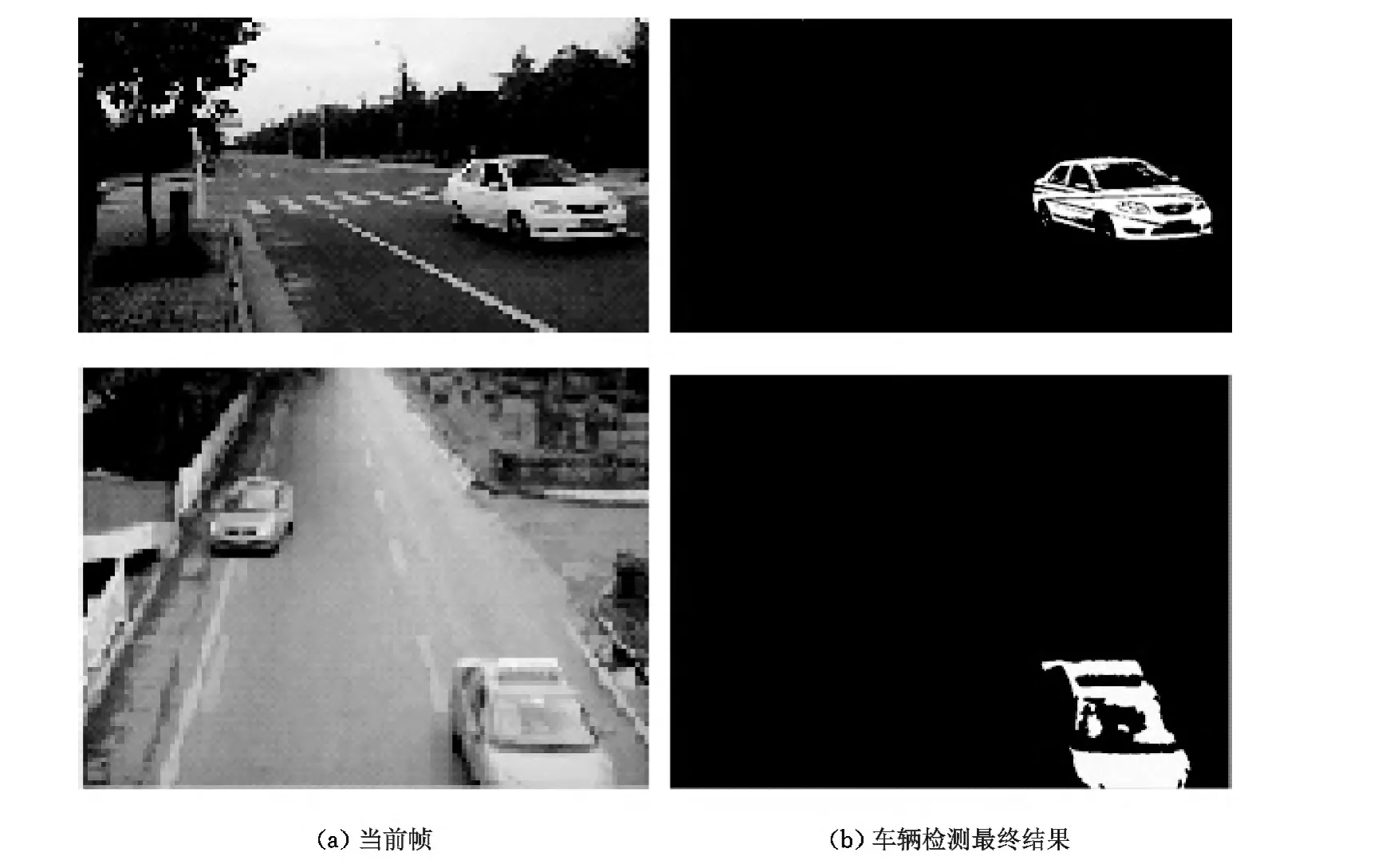
图3 视频车辆检测
4 结语
针对传统GMM背景建模方法对前景干扰抑制的不足,引入格拉布斯异常值判别准则,剔除初始10帧各像素点处代表前景信息的灰度异常值,构建背景建模方法,取得了良好的实验效果.所建立的背景模型不仅准确度明显高于原GMM背景模型,同时本方法还可较好地应用于基于GMM的视频车辆检测系统,从而验证了它的可靠性.
[1]王昊,郑云壮,段淞耀,等.基于航模辅助观测的车辆轨迹提取方法[J].哈尔滨工业大学学报,2014,46(6):105-110.
[2]许宏科,秦严严.一种基于 Hough变换的车道线检测新方法[J].徐州工程学院学报:自然科学版,2013,28(4):1-4.
[3]Buch N,Velastin S A,Orwell J.A review of computer vision techniques for the analysis of urban traffic[J].Intelligent Transportation Systems,IEEE Transactions on,2011,12(3):920-939.
[4]何力,曲仕茹.基于PLS-VIP特征降维的车辆检测[J].中国公路学报,2014,27(4):98-105.
[5]Li S,Yu H,Zhang J,et al.Video-based traffic data collection system for multiple vehicle types[J].IET Intelligent Transport Systems,2013,8(2):164-174.
[6]王殿海,胡宏宇,李志慧,等.违章停车检测与识别算法[J].吉林大学学报:工学版,2010,40(1):42-46.
[7]Bouwmans T,EI Baf F,Vachon B.Background madeling using mixture of gaussians for foreground detection-a survey[J].Recent Patents on Computer Science,2008,1(3):219-237.
[8]华媛蕾,刘万军.改进混合高斯模型的运动目标检测算法[J].计算机应用,2014,34(2):580-584.
[9]何平.剔除测量数据中异常值的若干方法[J].航空计测技术,1995,15(1):19-22.
