基于Sigmoid函数的PMSM模糊滑模观测器设计
2015-10-30牛绿原
牛绿原,余 剑,王 刚,李 宇
(南京理工大学 泰州科技学院,泰州 225300)
0 引言
永磁同步电动机具有体积小、效率高、调速性能优异等优点,被广泛应用于工业控制领域。从控制的角度来看,分为有传感器和无传感器两种,前者会带来成本上的增加以及运行不稳定性的增大,后者往往根据测得的电压和电流信息,结合永磁同步电动机的数学模型,通过理论估算的方法计算出转速和转角,可靠性和抗干扰性强,具有更为广阔的应用前景。目前,关于永磁同步电动机的无传感器技术已经成为一个研究热点。
近年来,国内外学者对此做了大量的研究。提出了许多方法,主要有:高频信号注入法、模型参考自适应法、扩展卡尔曼滤波法、滑模观测器法等等[1,2]。其中,滑模观测器法强调控制系统的结构随着开关特性而变化,不受系统参数和扰动影响,故而具有较强的鲁棒性,近年来被广泛应用于永磁同步电机的无速度传感器控制中。而传统的滑模趋近律采用开关函数,往往会出现剧烈的抖振[3]。为了减小抖振,文献[4,5]将Sigmoid函数引入到滑模观测器中,并构建了自适应速度控制器;文献[6]将Sigmoid函数和定子电阻辨识相结合,并通过实验进行了证明;文献[7]将模糊控制引入到滑模观测器中,通过仿真和实验验证了抑制抖动的有效性;文献[8]将反电势估测值引入到观测器中;文献[9]设计了二阶滑模观测器;文献[10]利用两模型输出的偏差构造了2个滑模面,设计了双滑模观测器。
本文以Sigmoid函数代替传统的开关函数,并以模糊控制来实现K值的自适应更新,同时,考虑到永磁同步电机是一个复杂的非线性系统,为了使系统同时具有调节速度快和稳态精度高的优点,在速度环引入模糊控制器,使其和传统的PI调节器相结合。通过仿真,验证了新设计的观测器的正确性。
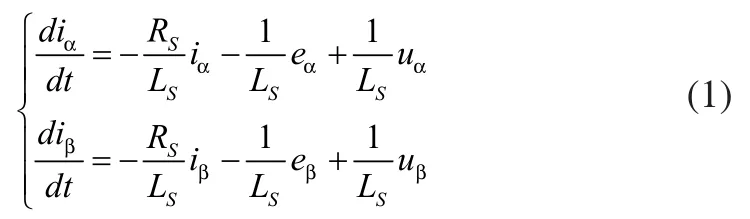
1 永磁同步电动机数学模型
PMSM在∂、β坐标系下的数学模型为:电压方程:
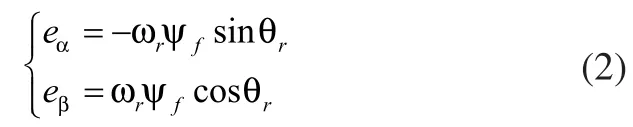
电动势方程:
转矩方程:

2 模糊滑模观测器设计
2.1 基于Sigmoid函数观测器设计
以Sigmoid函数代替传统的切换函数,不仅可以减小抖振带来的影响,而且可以省略低通滤波器和相角补偿。为此,构造电流型滑模控制方程为:

则可得滑模观测器的估计值为:

2.2 稳定性分析
式(4)和式(1)相减,得系统误差状态方程:


根据稳定性条件,必须有:
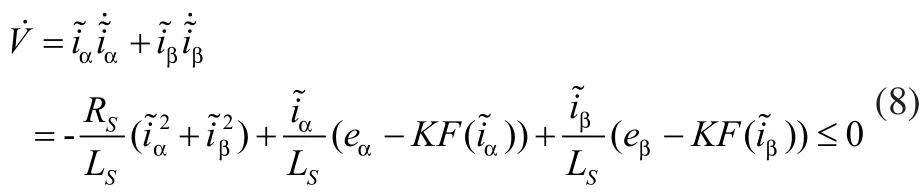
则可得到观测器稳定的条件为:

显然,只要滑模增益K大于电动势的最大值即可保证观测器的稳定性。
2.3 自适应模糊滑模增益的设计
由式(9)可以看出,滑模增益K必须足够大才能满足稳定性条件,传统的滑模控制中K的数值往往是根据经验选定的常数,但实际系统中电流的观测误差是时变的,固定的常数有可能增大抖振噪声,使估计误差增大,为了降低抖振,K值应该在满足稳定性条件的前提下根据误差的变化而变化。为此,本文将模糊控制引入到滑模观测器中,以调节K的大小。构建自适应模糊滑模观测器的原理图如图1所示。

图1 自适应模糊滑模观测器原理图
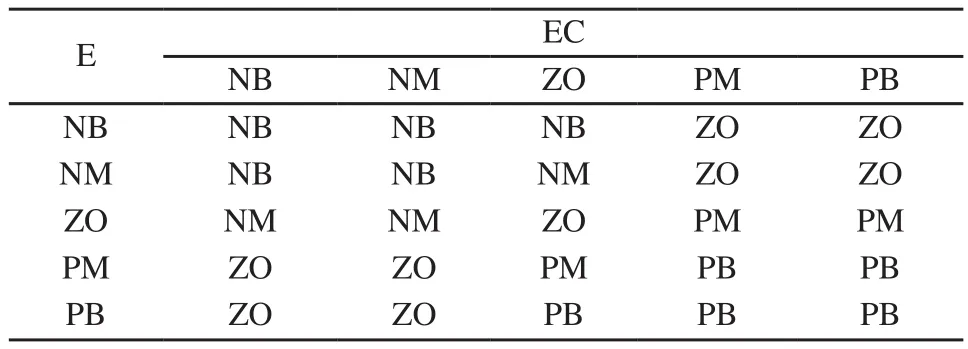
表1 输出变量KΔ的模糊规则表
选取隶属函数均为三角形,如图2所示。
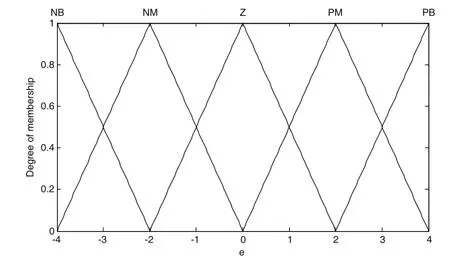
图2 隶属函数
3 仿真分析
为验证所提出控制策略的可行性和有效性,选用一台永磁同步电机,电机参数为:额定功率4kW,磁极对数4,相电阻Rs=2.875Ω,转子磁链ψf=0.17Wb,交直轴电感Ld=Lq=8.5mH,搭建了基于Matlab/Simulink软件的仿真模型。速度给定为600rad/s,负载转矩为0.5N.m,仿真参数设为固定步长,取0.0002s,算法为ode3,仿真时间设为0.2s,图3为系统基于SVPWM的矢量控制原理图。图4、图5、图6分别是基于Sigmoid函数的模糊自适应滑模观测器下的角速度实际值和估计值波形、位置实际值和估计值波形和位置误差波形。

图3 控制系统原理图
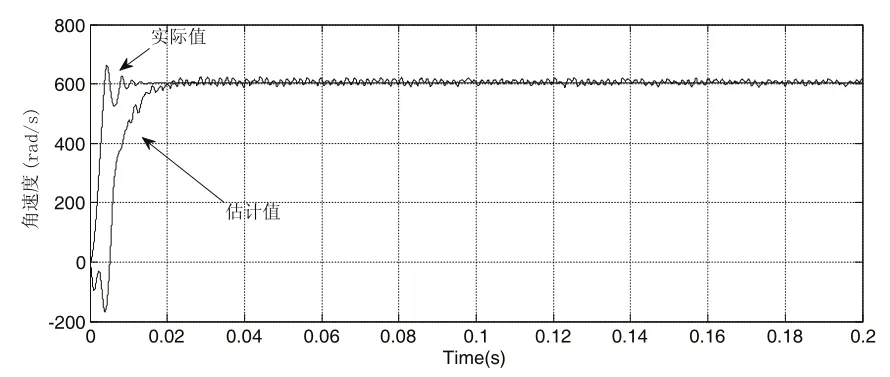
图4 转子速度实际值和估计值

图5 转子位置实际值和估计值

图6 转子位置误差
由图4可以看出,在速度上升阶段,估计速度低于实际速度,0.02s即可达到给定值,之后能够较好地跟踪跟随实际速度,由图5和图6可以看出,角速度估计值能够很快地(约200°电角度)接近实际值,之后便和实际值保持基本吻合,误差小,且抖振现象很小.仿真结果表明:所设计的基于Sigmoid函数的模糊自适应滑模观测器是正确的。
[1] 舒志兵,翟正磊,章杰,张涌松.基于滑模观测器的PMSM无传感器控制[J].电气传动,2012,42(11):7-10.
[2] 黄旭超,林荣文,林莹莹.永磁同步电动机无位置传感器矢量控制仿真[J].微特电机,2013,41(12):68-70.
[3] 刘昇,卢广山,徐瑜,刘闯.基于改进型滑模观测器的PMSM无位置控制[J].南京航空航天大学学报,2013,45(4):474-478.
[4] Paponpen K,Konghirun M. An Improved Sliding Mode Observer for Speed Sensorless Vector Control Drive of PMSM[A]Power Electronics and Motion Control Conference,IPEMC 2006.CES[C],IEEE 5th International,2006:1-5.
[5] Kung Ying Shieh,Nguyen Vu Quynh,Huang Chung Chun,etal.Design and Simulation of Adaptive Speed Control for SMO based Sensorless PMSM Drive[A]IEEE Conference Publications Proceedings of the 4th International Conference on Intelligent and Advanced Systems[C],ICIAS,2012:439-444.
[6] Hongryel Kim,JubumSon,Jangmyung Lee.A High speed Sliding mode Observer for the Sensorless Speed Control of a PMSM[J].IEEE Transaction on industrial electronics,2011,58(9):4069-4077.
[7] 张洪帅,王平,韩邦成,程金绪.基于模糊滑模观测器的磁悬浮高速永磁同步电机转子位置检测方法[J].电工技术学报,2014,29(7):147-153.
[8] 邱忠才,郭冀岭,肖建.基于Sigmoid函数的PMSM滑模变结构位置速度观测器[J].电气传动,2014,44(3):3-7.
[9] 张晓光,孙力,陈小龙,安群涛.基于二阶滑模观测器的永磁同步电机无位置传感器控制[J].电力自动化设备,2013,33(8):36-41.
[10] 王庆龙,张兴,张崇巍.永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J].南京航空航天大学学报,2014,34(6):897-902.
