手机U盘表面焊点缺陷自动检测系统研究
2015-10-30万相奎
李 昂,潘 晴,万相奎
(广东工业大学 信息工程学院,广州 510006)
0 引言
随着信息技术的飞速发展与迅速普及,大量数据内容不断增加。智能移动通信设备的存储需求变得越来越大。手机U盘的出现极大的方便了智能手机与电脑之间的数据共享。在手机U盘的工业生产过程中容易出现焊点质量缺陷。在传统质量检测过程中,质检员使用高倍显微镜对焊点进行人工检测,这种方式不仅效率低下而且准确率不高。
基于机器视觉的在线检测方法由于其非接触性、快速性、自动化程度高和可靠性高等特点,已经在国内外许多领域获得广泛应用[1,2]。目前的一些检测设备主要针对大尺寸PCB电路板,而对于诸如手机U盘等小尺寸电路板还没有相关的系统研究。本文所设计系统能克服传统人工检测的种种弊端,实现自动检测,降低了用人成本。本系统使用低成本CMOS相机,降低了系统整机的制造成本,同时验证了CMOS相机用于工业检测的可行性。
1 硬件平台搭建
计算机视觉系统通过图像采集装置,将被检测物转换为图像信号,利用图像处理系统根据像素,图像亮度,颜色等信息对目标进行特征提取,再根据系统的预设条件输出结果。本系统硬件平台由工业相机、镜头、光源以及计算机四个部分组成。实物样机照片如图1所示。
1.1 工业相机与镜头
根据实际需求,为实现被测物整体尺寸与局部焊点同时检测,根据被测物尺寸大小以及相机工作距离等因素,将视场范围选定为50mm×38mm(长宽比4:3)。相机选择500万像素CMOS工业相机,镜头选择25mm定焦镜头。工业相机将所采集的图像通过USB3.0接口传输至计算机。

图1 系统样机照片
1.2 光源照明
计算机视觉中使用光源照明的目的是使被测物的重要特征显现,并抑制不需要的特征。本系统光源选用环形碗状光源,用于检测表面焊点。碗状光源照射下,光线通过半球型的内壁多次反射,可以对表面不平的物体实现均匀照明,并可以完全消除阴影。
2 算法设计
本系统的检测算法主要分为三个步骤:预处理、焊点区域定位和缺陷识别。首先通过对原始图像进行预处理、倾斜校正,实现焊点区域定位;然后通过二值化处理、计算连通域面积和水平方向投影提取焊点缺陷特征;最后使用缺陷特征对焊点进行分类,从而识别出有缺陷的焊点。算法流程图如图2所示。

图2 算法流程图
2.1 预处理
手机U盘底板区域与背景区域灰度级对比明显,通过这一特征可以使用边缘检测提取出手机U盘的轮廓。首先对采集到的图像帧进行灰度化处理,然后使用高斯滤波器对图像进行平滑滤波。使用Canny算子进行边缘检测。在边缘检测中,抑制噪声和边缘精确定位通常无法同时满足,Canny算子能够在抗噪声干扰和精确定位之间寻求最佳折衷方案。由于检测出的边缘会存在不连续性,使用形态学处理使检测出的边缘线连接完整,如图3(b)所示。这里采用原点位于中心的3×3对称结构元素进行膨胀运算。
2.2 焊点区域定位
在实际检测过程中,被测品是随意摆放的,因此对焊点区域的精确定位造成了一定困难。焊点区域的定位准确与否,直接影响到后续缺陷识别的准确度。焊点区域定位步骤如下:
1)倾斜校正
使用Hough变换检测最长边缘直线,计算出倾斜角α,将边缘检测后的图像旋转(90-α)度,实现水平方向倾斜校正,如图3(c)所示。使用8连通域对倾斜校正后的图像进行种子填充,之后选取最大的连通区域,这样能够滤除背景噪声。如图3(d)所示。
2)区域定位
定位出最大连通区域的位置。这里采用逐行逐列的扫描方法,先从上到下扫描纪录每行中点为1的个数,当一行中1的个数大于一个阈值时,计录行数。同理再从左到右,从下到上,从右到左扫描记录,最终得到四个角点的坐标。利用这四个角点坐标在原始灰度图上定位整个U盘的区域,如图3(e)所示。接下来利用输出图像的中心点坐标可以很容易定位出焊点所在的矩形区域,如图3(f)所示。
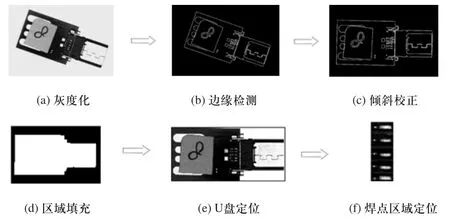
图3 焊点区域定位流程
2.3 缺陷识别
2.3.1 阈值分割
本方法对正常、桥接和缺焊三种焊点进行识别。焊点区域内有5个焊点,为了识别出样本中每个焊点的质量情况,对单个焊点进行分割后逐一进行识别。在环形正面光源的照射下,焊锡部位会发生反光,而没有焊锡的部位不会。为了提高图像的检测效果和识别速度,对焊点区域的灰度图像进行二值化处理,使图像只含有黑白两种颜色像素的图像,使用最大类间方差法找到一个合适的阈值T,然后通过式(1)输出二值化图像g (x,y)。从而排除噪声干扰,使感兴趣的焊点部位得到充分表达。

f(x,y)为二维灰度图像函数,T为阈值,1代表目标图像,0代表背景图像。
在二值化图像区域中,白色部分代表有焊锡的区域。由于存在焊点二值化区域间隔较大,且在出现缺陷时排列不均等现象,这里使用提取焊点的质心坐标来定位焊点以实现单个焊点分割,如图4所示。

图4 焊点分割
2.3.2 特征提取
1)水平方向投影
通过提取焊点的水平方向投影直方图特征,利用巴氏距离与标准焊点模板进行相似度度量,可以区分出桥接的焊点,而缺焊的焊点的水平方向投影直方图与正常焊点相似,不容易被区分。三种类型的焊点水平方向投影直方图如图5所示。

图5 三种类型焊点水平方向投影直方图
2) 连通区域面积计算
通过统计二值化区域内像素值为1的像素点个数可以计算出连通区域的面积。正常焊点区域的连通域面积会保持在一定范围内浮动;当发生缺焊时,焊锡会减少,导致连通区域面积变小。利用这一特征可以区分出缺焊的焊点。首先利用水平方向投影特征识别出桥接焊点,再以连通区域面积大小特征对缺焊焊点进行识别。
3 实验与分析
实验中使用30个手机U盘样品上的70个焊点样本进行识别,其中正常焊点50个,桥接和缺焊样本各为10个。实验样本统计结果如表1所示。

表1 测试样本统计结果
从实验结果中可以看出,缺陷样本的识别率达到100%,正常样本中有两个被误判,原因是样本由于光照等因素的影响,在二值化处理后连通区域的面积过小,导致被判定为缺焊。总体来看本识别方法具有比较高的识别率。
在针对焊点缺陷的识别研究[3~6]中,识别算法大致分为基于统计建模的图像对比算法[7]和基于特征的图像分析算法[8]两大类。文献[9]使用神经网络算法进行分类,具有良好的识别效果。但使用神经网络分类器的运算量较大,降低了识别效率。本文使用水平投影直方图巴氏距离相似度和焊点面积特征相结合对焊点缺陷进行识别,提高了识别速度。
4 结束语
本文设计基于机器视觉的手机U盘缺陷自动检测系统,结合生产实际,对手机U盘的焊点图像进行深入分析;采用边缘检测、区域填充、阈值分割等一系列的图像处理方法,有效对手机U盘表面焊点进行定位;使用水平方向投影、连通区域面积作为特征对焊点缺陷进行了识别。实验证明本系统方法能够实现快速准确的实现焊点缺陷检测。
[1] 李薇.PCB自动光学检测系统[J].工业控制计算机.2009,22(1):44-46.
[2] Acciani G,Brunetti G,Fornarelli G,et al.AOI based neurofuzzy system to evaluate solder joint quality[A].ICEIS 2009-11th International Conference on Enterprise Information Systems[C].2009.
[3] 姚忠伟.基于机器视觉的PCB缺陷检测算法研究[D].哈尔滨:哈尔滨工业大学,2013.
[4] 李昌海.基于AOI的LCD线路缺陷检测系统[D].成都:电子科技大学,2013.
[5] 刘阳.基于图像处理的PCB焊接缺陷检测技术研究[D].大连:大连理工大学,2009.
[6] 张静.PCB表观缺陷的自动光学检测理论与技术[D].成都:电子科技大学,2013.
[7] 李正明,黎宏,孙俊.基于数字图像处理的印刷电路板缺陷检测[J].仪表技术与传感器,2012,(8):87-89.
[8] 舒操,汪同庆,李阳.结合标定拟合和模糊理论的焊点特征颜色提取[J].计算机工程与应用.2013,(11):244-247.
[9] 周颖,赵海凤,郝红敏.基于图像处理的焊点缺陷识别方法的研究[J].计算机工程与应用,2013,49(1):239-241.
