再复卷机退纸架电机控制方法研究
2015-10-30孟彦京
李 茜,赵 丹,孟彦京
(陕西科技大学 电气与信息工程学院,西安 710021)
0 引言
再复卷机用于对已复卷的50g/m2~120g/m2的不合格成品纸进行再次分切复卷,复卷成宽度紧度符合要求的成品纸卷,在复卷过程中还可以除去质量不好的纸张,粘结断头。再复卷机不同于普通复卷机的是它的退纸架上有左右两台电机共同驱动退卷纸芯,对于再复卷机退纸架电机的控制精度直接影响退卷纸幅的张力控制精度,而退卷张力控制的稳定与否又与成品纸卷形态的优劣紧密相关。因此,必须为再复卷机退纸架电机选择正确的控制策略,实现退卷纸幅张力的精确控制。
1 再复卷机工作原理
河南濮阳龙丰纸业有限公司2014年下引纸再复卷机项目中使用的在复卷机退纸架如图1所示。

图1 再复卷机退纸架
如图1所示,再复卷机是把把不合格卷筒纸放在液压无轴退纸架上,退纸架左右两边各配有交流变频电机、光电编码器及张力传感器以保持纸幅有均匀的张力,并在断纸时能使纸幅快速制动。纸幅由放纸卷引出,通过上递纸装置和导纸辊装置,经过弧形辊舒展后,通过纵切系统进行纵切,再经过弧形辊和递纸装置,绕过后支承辊而缠卷在卷纸筒上,卷纸筒依靠两个支承辊的驱动而运转,从而牵动整个纸页前进。
2 再复卷机退纸电机控制要求
再复卷机是重新复卷已经复卷过得纸卷,在复卷过程中,纸幅也是从退纸卷上引出,绕过导纸辊、舒展辊,通过固定位置的纵切机构,从机台下面送人纸幅使其绕过后底辊,然后卷在卷纸轴上,如图2所示。但由于复卷机没有退纸辊,它是通过退纸架上左右两端的电机共同驱动一个退纸纸芯,而纸芯比较柔,在高速运行性,就对两端电机的控制提出了进一步的要求。再复卷机运行时,必须保证两电机同步运行,因此对于再复卷机退纸电机的控制要求就是如何保证两台电机能够稳定同步运行。
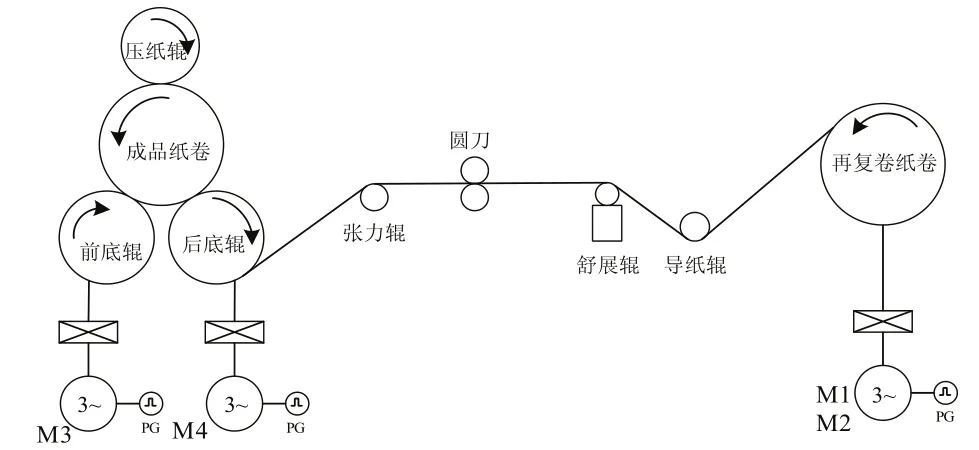
图2 再复卷机结构示意图
3 再复卷机退纸电机同步控制方式
实现多电机同步控制,通常有两种方式:一是机械方式,二是电方式。机械方式采用链条、齿轮等刚性连接来实现多电机同步控制。电控制由于具有控制精度高,灵活性好的优点,已经广泛应用,电控制一般包括主从控制、并行控制、交叉耦合控制、偏差耦合控制等控制方式。但由于本项目中,只有两台电机同步控制,而偏差耦合控制是在交叉耦合控制的基础上研究出的适用于三台及以上电机同步控制的方法,因此在本文中不做说明。
3.1 主-从控制
主/从控制仿真模型如图3所示。第一台电机作为主电机,控制器将设定转速送入主电机,主电机的输出信号作为下一台电机的输入信号。由此可知这种结构的系统中,第一台电机只能作为主电机,后一台电机只能作为从电机,因而中间的电机既是主电机也是从电机,当然,在本项目中只有两台电机,一个主电机,一个从电机。
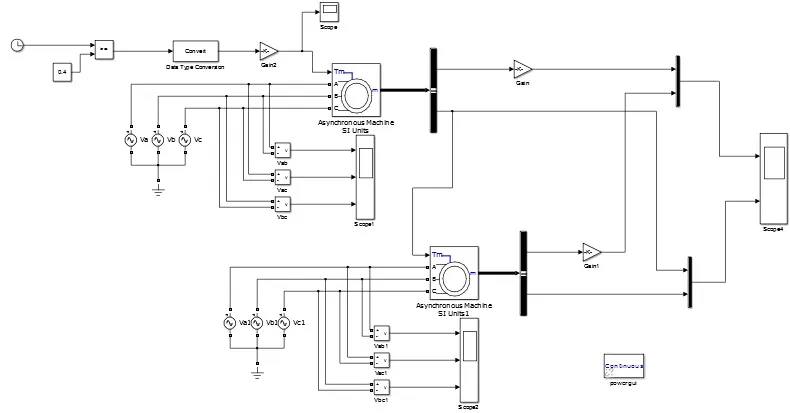
图3 主从控制仿真模型
在Matlab7.0中对主/从控制原理图进行负载突增的仿真实验,两台电机给定转速设定为1500rad/min,仿真时间为2s。得到的仿真结果如图4所示。
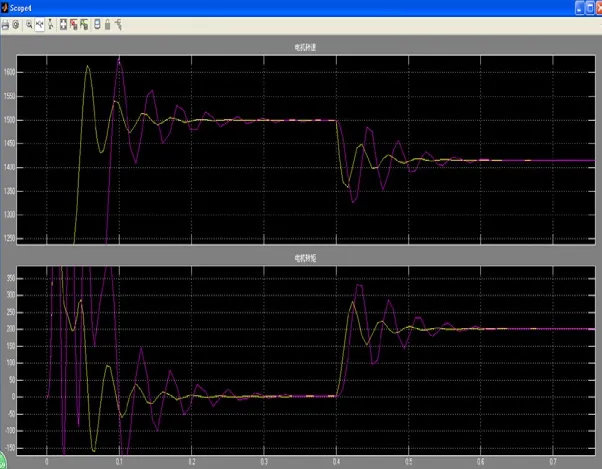
图4 主从控制转速跟随曲线
从图中可以看到,从电机从0s得电到0.3s两台电机速度趋于稳定同步,设定在0.4s时刻给电机增加负载,两台电机的转矩增加并出现波动,而转速也降低,直至0.6s两台电机的速度和转矩才趋于同步稳定,受负载扰动影响时间为0.2s。
3.2 并行控制
并行控制结构简单,易于操作,其仿真模型如图5所示。并行控制中两台电机共同拥有一个输入信号,两台电机的控制系统之时相互独立。当某一电机受扰动影响时,其自身转转会发生改变,由于这两台电机的系统之时没有耦合,故其中任意一台电机运行状态发生改变,其他电机因无反馈信息而保持自身运行状态不变,可能会造成比较严重的电机时失步。如果两台电机在运行过程中没有任何扰动,则整个系统的同步性能会比较好,但在实际应用中,这种情况基本是不存在的。
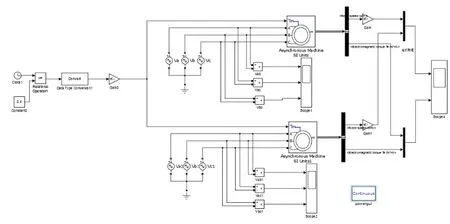
图5 并行控制仿真模型
在Matlab7.0中对并行控制原理图进行负载突增的仿真实验,为了便于观察两电机的速度趋于稳定性,我们将电机1的速度增益设置的与电机2的不同,仿真时间为2s。得到的仿真结果如图6所示。

图6 并行控制转速跟随曲线
由图中可以看出,两电机在0.2s时速度、转矩趋于稳定,而在0.4s给定负载后,两电机的转速均有波动,波动延续到0.53s停止,两电机的转速趋于同步稳定,受负载扰动影响时间为0.13s。并行控制由于各个电机时没有反馈信号互相传递,整个系统处于开环状态,当受到负载扰动后,两电机转速各自发生波动,最后达到稳定状态。
3.3 交叉耦合控制
交叉耦合控制仿真模型如图7所示。电机之间没有主次之分,同时电机之间形成耦合。每台电机加入速度补偿器,当一台电机速度发生改变时,另外一台电机能快速的对电机的同步误差进行补偿,因此具有较强的抗扰动能力和较高的控制精度。但是交叉耦合控制结构不适用于三台及三台以上的电机。
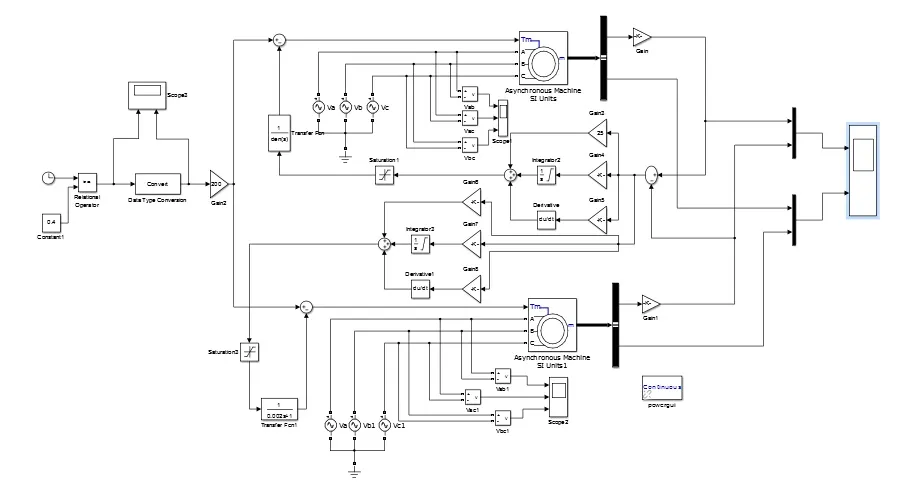
图7 交叉耦合控制仿真模型
在Matlab7.0中对并行控制原理图进行负载突增的仿真实验,为了便于观察两电机的速度趋于稳定性,我们将电机1的速度增益设置的与电机2的不同,仿真时间为2s。得到的仿真结果如图8所示。
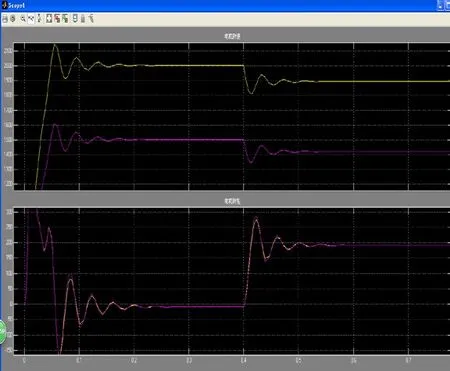
图8 交叉耦合控制转速跟随曲线
由图中可以看出,两电机在0.2s时速度、转矩趋于稳定,而在0.4s给定负载后,两电机的转速均有波动,波动延续到0.53s停止,两电机的转速趋于同步稳定,受负载扰动影响时间为0.13s。
4 结束语
从以上分析我们可以看出,当整个电机控制系统空载启动时,并行控制与偏差耦合控制的同步控制性能比主从控制要优越。但在发生负载扰动后,主从控制中从电机根据主电机的转速进行调节后,转速很快发生跟随,达到了一定的同步控制性能,但如果从电机发生负载突变,主电机却无法接收到从电机的转速反馈信号,则会产生电机失步的现象。并行控制由于各个电机时没有反馈信号互相传递,整个系统处于开环状态,当受到负载扰动后,两电机转速各自发生波动,最后达到稳定状态。 交叉耦合控制电机均有反馈信号传递,整个系统处于闭环状态,任意电机状态的改变都会影响到其余电机的状态,能够时刻保持电机的同步性。因此在河南濮阳龙丰纸业有限公司2014年下引纸再复卷机项目中,我们结合以上考虑并联系现场实际成本和实际运行稳定性问题,我们退纸辊电机的控制方式选择主从控制。
[1] 孟彦京.造纸机变频传动原理与设计[M].西安:陕西人民出版社,2002.
[2] 杨晨娜.多电机同步控制方式的研究[J].知识经济,2011(12):99 100.
[3] 王晶,翁国庆,张有兵.电力系统的MATLAB/SIMULINK仿真与应用[M].西安:西安电子科技大学出版社,2011.
[4] 潘晓晟,郝世勇.MATLAB电机仿真精华50例[M].北京:电子工业出版社,2007.
[5] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,1999.
