变结构航天器动力学特性在轨辨识方法综述
2015-10-28黄龙飞尚志柳宁
黄龙飞尚志柳宁
(1中国空间技术研究院载人航天总体部,北京 100094)
(2中国空间技术研究院,北京 100094)
变结构航天器动力学特性在轨辨识方法综述
黄龙飞1尚志2柳宁1
(1中国空间技术研究院载人航天总体部,北京 100094)
(2中国空间技术研究院,北京 100094)
动力学特性在轨辨识是对大型变结构航天器精确控制的基础和关键。首先,分析了国外在动力学特性在轨辨识领域的工程应用。其次,从在轨运行过程对动力学特性的影响出发,对在轨辨识方法的工程适用性进行了分析和评述,并总结了开展制约航天器动力学特性在轨辨识方法工程应用的条件。最后,对航天器质量特性和模态参数在轨辨识方法的应用进行了总结,可为动力学特性在轨辨识方法在我国未来大型变结构航天器中的应用提供参考。
变结构航天器;动力学特性;在轨辨识
1 引言
大型变结构航天器结构复杂,由多个舱段分次发射入轨组装而成,是我国未来航天器发展的重要方向之一。在轨构型变化、模块化结构调整、载荷工况变化等过程会使得航天器成为变结构、变质量、变参数的不确定性对象,若未能获取变化后的动力学特性,则难以实现高精度的姿态控制,影响复杂空间任务的顺利完成。从控制器设计角度考虑,大型变结构航天器的质量、质心位置、转动惯量和柔性结构的模态参数对控制器设计影响较大,但地面无法进行全尺寸试验来获取整体的动力学特性参数,仅能根据理论计算和经验估计,从而影响控制精度、研制成本和在轨运行寿命。而通过在轨辨识的方法能够准确得到这些参数,因此,开展变结构航天器动力学特性在轨辨识方法的应用研究具有重要意义。
在轨辨识是建立在动力学反问题的基础上,根据航天器在轨激励输入及响应反求质量特性参数和模态参数等内部参数,是动力学的逆问题[1]。本文结合美国、俄罗斯、加拿大、日本的工程应用实例,对航天器质量特性和模态参数在轨辨识方法的工程适用性进行分析和评述,并分析我国在该领域工程应用的制约因素,旨在为动力学特性在轨辨识方法在我国未来大型变结构航天器领域中的应用提供参考。
2 航天器动力学特性在轨辨识方法应用分析
自20世纪80年代起,国外就开始了对大型变结构航天器动力学特性在轨辨识领域的研究[2],美国、俄罗斯、加拿大、日本等国开展了在轨辨识算法的仿真研究、地面试验验证及在轨辨识试验的工程应用。国内在该领域尚处于实验室研究阶段,尚未在公开发表的文献中查到有在轨辨识试验的工程应用。
2.1 质量特性参数在轨辨识方法
航天器的质量特性参数在轨辨识方法主要有滤波类方法和最小二乘类方法。滤波类方法的基本原理是将动力学参数增广到航天器系统的状态方程中,并结合高精度陀螺仪和加速度计等敏感器的测量信息进行滤波估计。主要有卡尔曼滤波、高斯二阶滤波等。最小二乘类方法基本原理是将动力学方程改写为最小二乘的线性形式,并结合高精度的陀螺仪和加速度计等敏感器测量信息进行参数最优估计。主要有一般最小二乘法、有界最小二乘法、递推最小二乘法、加权最小二乘法、总体最小二乘法等。两类方法比较见表1。
加拿大、俄罗斯等已经将质量特性在轨辨识技术应用在大型航天器中。1992年,加拿大通信卫星公司的Palimaka等[3]在阿尼克-E2(ANIK-E2)卫星上使用了质量特性估计器,通过自旋加快和双自旋机动后由陀螺测量到角速度变化数据,采用加权最小二乘方法辨识出转动惯量,解决了大天线、大太阳翼等柔性附件在轨展开与转动过程引起航天器动力学参数变化的问题,在轨修正了动力学模型。
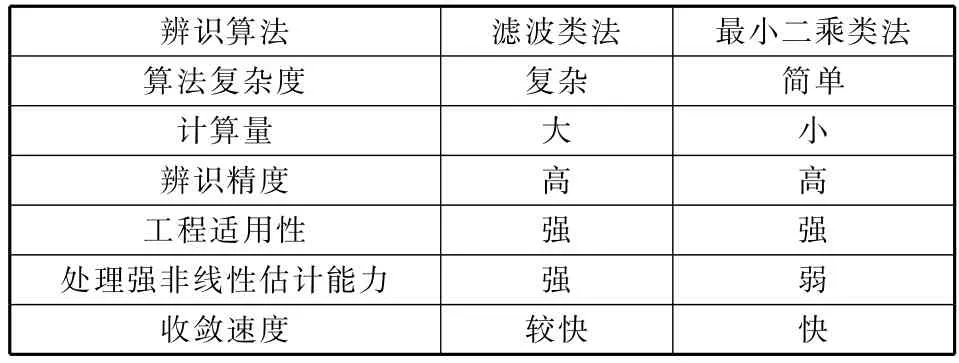
表1 滤波法和最小二乘法特点的比较Table 1 Comparison between algorithms of filtering and least squares
2004年,俄罗斯联邦航天局利用“国际空间站”中具有推进功能的俄罗斯舱段的姿轨控发动机产生激励,由加速度计测量数据,采用最小二乘法辨识出到2004年8月为止“国际空间站”在轨组装后的组合体整体质量[4],约183 311 kg,辨识结果见表2,考虑了测量误差,辨识精度在1%内,实现了对新模型的准确控制,解决了变结构航天器在轨组装后质量特性参数变化引起的动力学模型变化的问题。
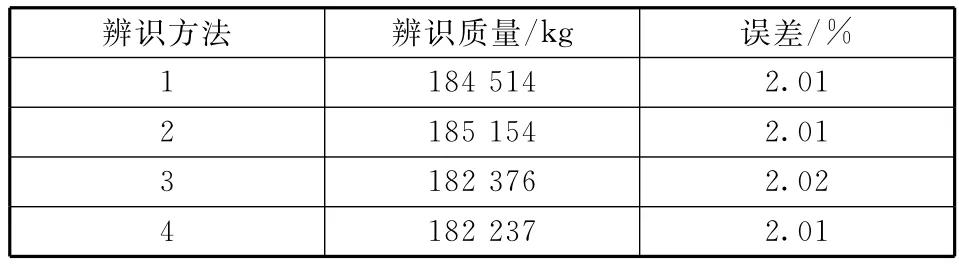
表2 俄罗斯对“国际空间站”在轨质量辨识Table 2 Identification of mass of ISS
此外,俄罗斯联邦航天局还对“国际空间站”的惯量进行了离线辨识[5],基于对惯性空间定向时的姿态遥测下行数据,重构“国际空间站”的姿态运动方程,得到控制力矩陀螺的角动量关于转动惯量矩阵元素及气动力矩参数等的线性表示,采用最小二乘法辨识出转动惯量,其辨识精度为1%~13%,辨识结果见表3,满足实际工程应用。NASA在20世纪末提出利用“国际空间站”的美国舱段配置的非线性磁力矩器对“国际空间站”组合体[6]施加控制力矩激励,依靠星载计算机控制系统,采用递推最小二乘法在轨辨识“国际空间站”组合体的转动惯量。最小二乘辨识方法的在轨应用修正了在轨组装建造完成的“国际空间站”的数学模型,为控制器设计提供新的输入参数,成功解决了变结构航天器动力学模型重构问题。
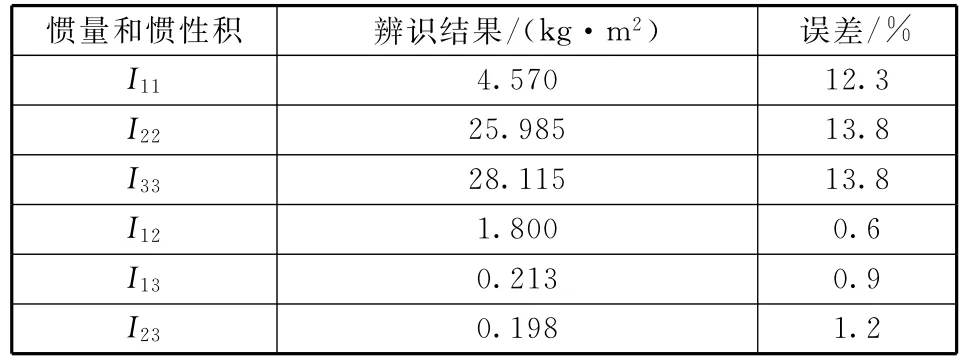
表3 俄罗斯对“国际空间站”在轨惯量辨识Table 3 Identification of inertia tensor of ISS
从上述工程应用实例可以看出:最小二乘类方法因为计算量较少、收敛速度快等优点适用于大型复杂航天器结构的质量特性参数在轨辨识,在国外具有较高的成熟度。其中在星载计算机控制系统采用递推最小二乘法能实现在轨、在线实时辨识参数,这要求星载计算机具有较强的处理能力和足够的存储空间,而基于遥测下行数据的最小二乘法能实现离线辨识参数,通过在地面模型重构,减轻了星载计算机的负担。
2.2 模态参数在轨辨识方法
模态参数在轨辨识方法通常分为时域法和频域法。频域法是根据模态试验所得到频响函数估计与结构频响函数的数学模型之间留数的最小二乘拟合,分离模态、获得在轨结构的各阶模态参数估计。时域法是直接从激励输入和响应输出的时域数据,根据运动微分方程、状态方程、差分方程或脉冲响应函数等模型,进行系统动态特性参数辨识。频域法抗噪声干扰能力强于时域法,适用于低频密集模态的参数辨识;时域法是直接利用自由响应或脉冲响应函数进行辨识,适用于激励难以测量的大型结构。两类算法的比较见表4。
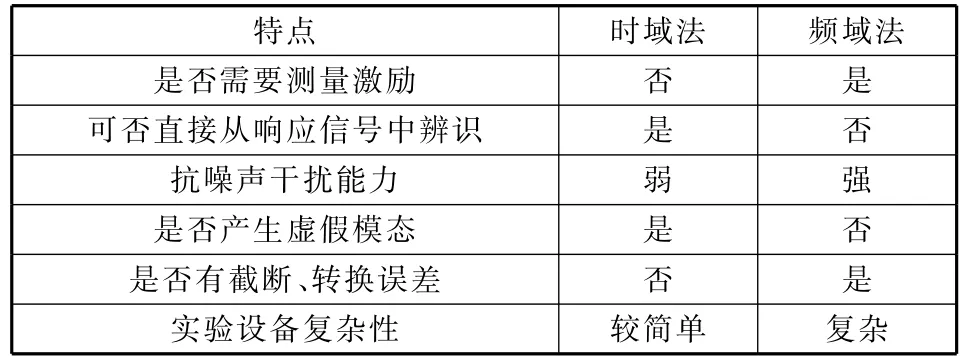
表4 时域法和频域法的比较Table 4 Comparison between time domain and frequency domain
喷气推进实验室(JPL)[7]在1989年,应用频域辨识方法,对某大型空间柔性航天器平台进行了在轨模态参数辨识试验,在每根肋板根部设置主动激励器激发模态,在肋板布置30个敏感器测量角位移响应(见图1)。该试验解决了大型变结构航天器在轨模态参数辨识的问题,修正控制模型,提高了控制精度。虽然该方法抗干扰能力强,但涉及时频域转换,会产生截断、转换误差,且采用主动激振器增加了设备的复杂度,不适合多舱段组装的航天器。
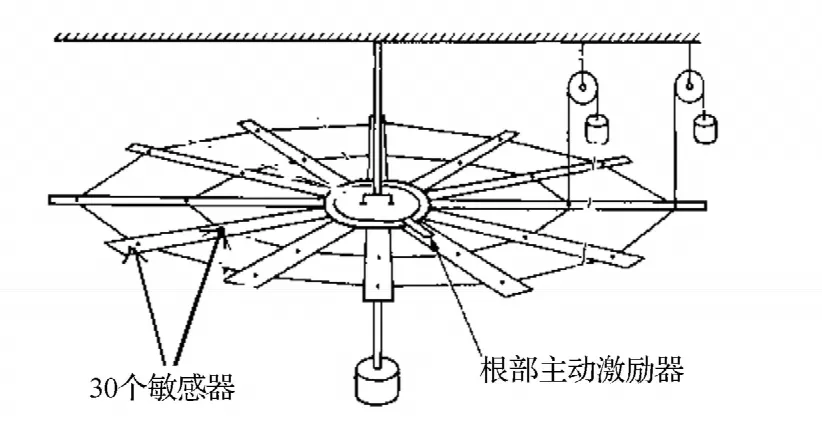
图1 测试结构Eig.1 Test configuration
NASA于1994年对“哈勃”太空望远镜进行了在轨模态辨识试验[8],利用反作用轮激励,速率陀螺输出,采用频域辨识法,获取颤振频率。此次试验在轨识别出了高于0.1 Hz的频率,这是在发射前没有分析出的新弯曲模态频率,解决了在轨模态参数与地面试验测试结果不一致的问题,为设计干扰衰减控制器提供了正确模型。
NASA兰利研究中心[9]在1993年将时域辨识方法应用在自由号空间站的模态参数辨识试验中,由发动机喷气激发自由号空间站运动,加速度计测量输出,采用卡尔曼滤波及马尔科夫参数辨识算法(时域法),成功分离出前12阶模态。从工程应用角度分析了在轨激励和响应测量方法,解决了大型航天器密集低阶模态难分离的问题。
1996年到1997年,和平号空间站在轨进行了结构动力学试验[10]。在2年时间内选取了14个试验阶段中的35个时段开展辨识试验,利用推力器喷气激励,辅助传感器单元测量加速度,采用特征实现算法(时域法)辨识模态频率、阻尼因数和振型(见表5)。这一系列在轨辨识试验的成功实施,克服了地面无法进行全尺寸试验的限制,解决了在轨组装的大型空间结构的动力学模型变化的问题。
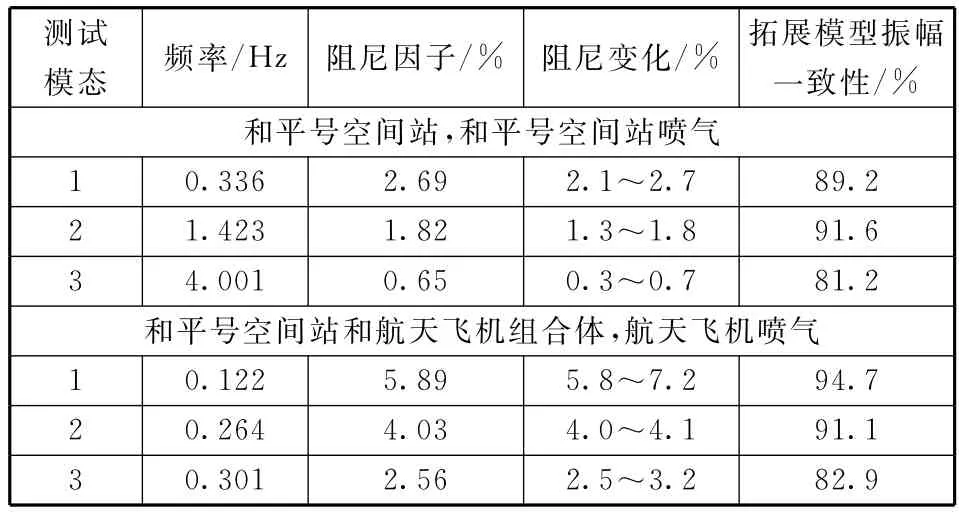
表5 在轨模态分析结果Table 5 On-orbit modal analysis summary
美国于2000年,利用奋进号航天飞机[11](含60 m长的伸展臂)滚动、偏航、俯仰姿态机动,用惯性测量单元(IMU)测量速度响应,采用时域法对伸展臂低频特性参数进行在轨辨识,如图2所示。在不同工况下进行了多次试验,用辨识结果修正控制系统参数,成功实现了伸展臂基线保持,保证了干涉测量精度。该方法无时频域转换误差,直接从时域响应数据中辨识模态参数,精度较高。
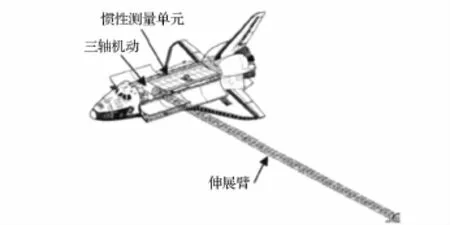
图2 奋进号航天飞机与伸展臂组合体结构Eig.2 Shuttle Radar Topography Mission configuration and geometry
日本于1995年到1999年在工程试验卫星-6(ETS-Ⅵ)上开展了模态参数辨识实验[12],见图3。并于2006年,在工程试验卫星-8(ETS-Ⅷ)上再次试验[13],星上装备2副大型可展开反射天线,尺寸为19 m×17 m,如图4所示。试验利用姿轨控喷气推力器进行脉冲激励和随机激励,通过安装在姿态控制系统、太阳翼、天线上的加速度传感器测量数据,利用特征实现算法(时域法)进行模态参数的辨识。模态参数在轨辨识试验确认了太阳翼等柔性附件在轨展开与转动所引起的模态参数变化,为日本该系列卫星在轨模型修正提供了依据,重新确定了姿态控制器的设计标准。
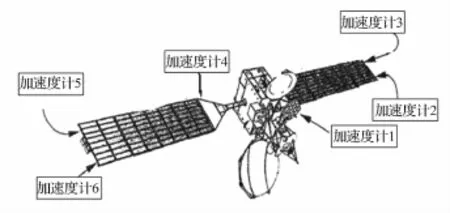
图3 ETS-Ⅵ卫星Eig.3 System of ETS-Ⅵ
从上述工程应用实例可以看出,频域法抗噪声干扰能力强于时域法,但时域法是直接利用自由响应或脉冲响应函数进行辨识,适用于激励难以测量的大型结构,在国外具有较高的成熟度,推动着航天器大型化、复杂化的发展,成功应用在“国际空间站”、航天飞机以及具有大天线、大太阳翼的卫星等大型变结构航天器的模态参数辨识,能确定在轨组装后的航天器结构数学模型。

图4 ETS-Ⅷ卫星Eig.4 Configuration of ETS-Ⅷ
2.3 小结
根据国外对航天器质量特性和模态参数在轨辨识方法的应用实例,对在轨辨识方法的工程应用进行了分析探讨:①对质量特性参数而言,最小二乘类方法因为计算量较小、收敛速度快等优点比滤波类方法更加适用于大型复杂航天器结构的质量特性参数在轨辨识,其中递推最小二乘适用于在线辨识,跟踪时变参数,而总体最小二乘考虑了误差影响,辨识精度高,具有较强的工程适用性。②对模态频率而言,频域法抗噪声干扰能力强于时域法,适用于低频密集模态的参数辨识;时域法直接利用自由响应或脉冲响应函数进行辨识,适用于激励难以测量的大型结构。时域法应用在“国际空间站”、航天飞机以及具有大天线、大太阳翼的卫星等大型变结构航天器的模态参数辨识,能确定在轨组装后的结构数学模型。从国外工程应用实例上可以看出。时域法在国外具有较高的成熟度,推动着航天器大型化、复杂化的发展。
3 在轨运行过程对航天器动力学特性的影响
大型变结构航天器可能存在的在轨运行过程主要有以下4类:①多舱段在轨组装过程:包括舱段交会对接、舱段撤离、转位等,特点是组装频繁程度低、持续时间较短、模型变化有一定的预知性、对接分离引起参数突变等,影响航天器质量特性和受到的冲击载荷参数,这些参数的偏差又会影响航天器推进剂的消耗和控制精度;②在轨长期运行保障过程:包括推进剂补加、物资补给、仪器设备在轨更换等,特点是保障过程频繁、持续时间较长,推进剂补加引起的参数时变且有一定的预知性,物资补给和设备更换引起的参数突变等,对航天器质量特性影响较大,从而影响推进剂消耗;③机构运动过程:太阳翼展开、天线转动、机械臂运动等;特点是参数时变、且在轨结构模态频率低而密集,受到干扰后产生持续振动等,影响航天器转动惯量和模态参数,这些参数的偏差会严重影响控制精度和稳定度;④其他过程:在轨捕获合作目标与非合作目标、在轨释放小卫星、空间物体的意外撞击、载人航天器宇航员舱内外活动等,特点是参数变化不可预知,影响航天器控制精度和稳定度。
大型变结构航天器可能存在在轨运行过程与其动力学特性参数之间的耦合影响,结合在研航天器的工程数据,对运行过程与动力学特性的影响量级进行分析(见表6),动力学特性在轨发生变化会影响航天器的运行,因此需重新获取变化后的动力学特性,从而减少由于参数偏差的存在而带来的影响。
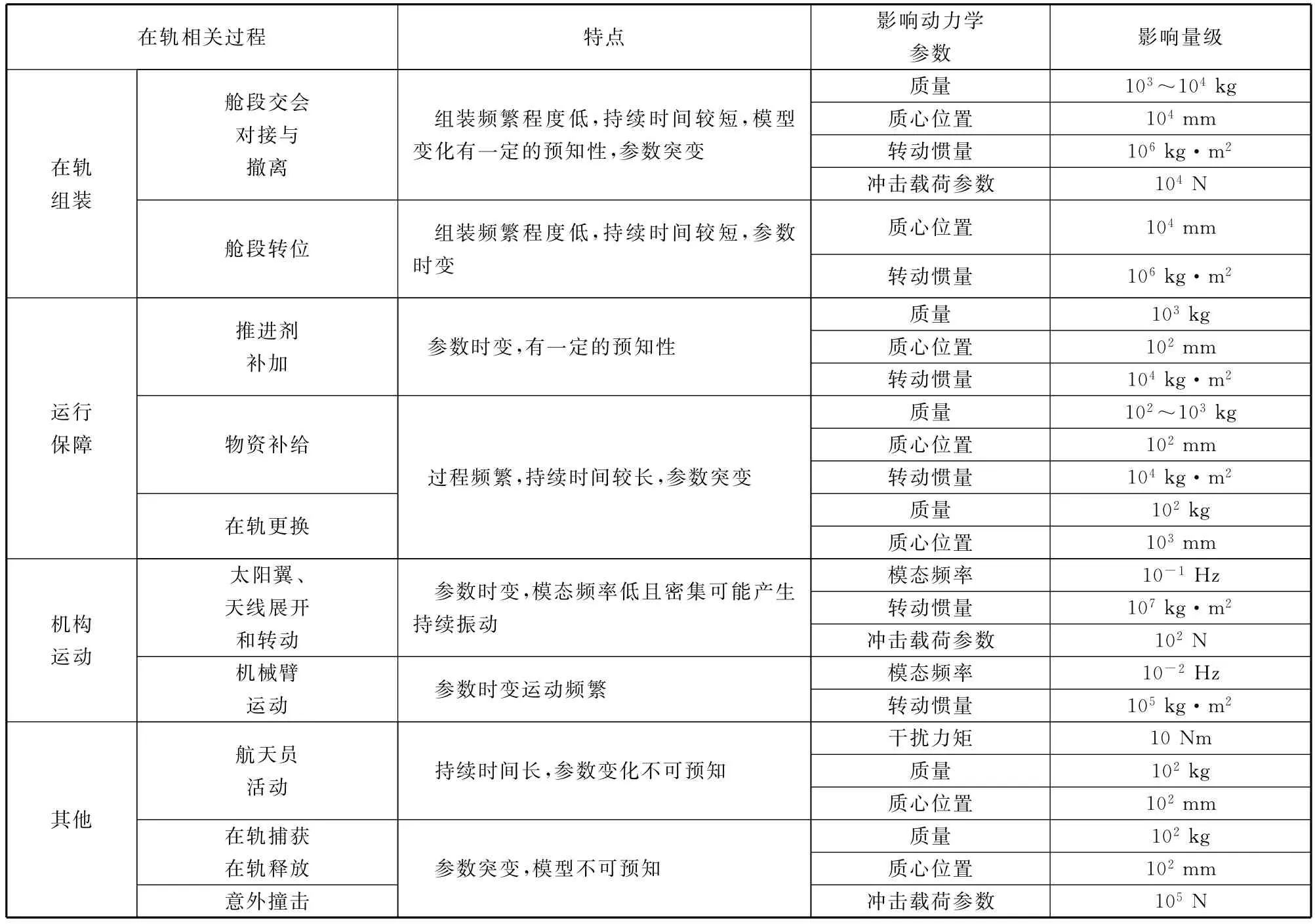
表6 影响分析Table 6 Analysis of influences
4 航天器动力学特性在轨辨识方法适用性分析
大型变结构航天器在轨相关过程会影响其动力学特性参数,而动力学特性参数在轨发生变化会影响航天器的运行,因此需通过地面测试粗略估计或在轨辨识精确获取变化后的动力学参数,从而减少由于参数偏差的存在而带来的影响。对国外工程应用分析,总结了方法的适用性,如表7所示。大型变结构航天器的质量、质心位置、转动惯量和柔性结构的模态参数对控制器设计影响较大,且舱段交会对接与撤离、太阳翼的展开等过程会使参数发生变化,通过在轨辨识方法能够准确得到。航天员的活动等过程也会在一定程度上影响参数变化,通过地面计算与经验估计分析,航天员带来的干扰在控制的设计余量内,无需在轨辨识来分析其引起的参数变化量。

表7 方法适用性分析Table 7 Analysis of applicability of methods
5 开展动力学特性在轨辨识的工程因素研究
动力学特性在轨辨识方法在我国大型变结构航天器上应用时面临着诸多工程困难,如在轨施加激励、在轨测量响应、数据采集与处理、各舱段研制进度不同步等,要充分考虑这些过程的工程可实施性。
(1)变结构航天器动力学模型复杂,使得辨识算法也较复杂,采用滤波类方法辨识航天器质量特性计算量大,需要解决模型复杂的问题,采用最小二乘类方法辨识航天器质量特性需要解决非线性不收敛问题,以满足高精度、在线实时辨识等要求;采用时域法和频域法辨识模态参数需要解决激励难以施加与测量、噪声干扰、模态低频密集、动力学模型降阶、截断与转换误差等问题。
(2)从工程的角度,考虑可操作性和成本等因素,用于参数辨识的在轨激励存在难以施加、难以测量和能源消耗的困难,而且对辨识精度和系统的运动都存在影响。在一定的时间内,激励的幅值越大,辨识的精度越高,收敛速度也越快。但激励过大,既会使系统产生过大机动,对控制会产生不利影响,又会增加能源消耗。为了准确获取在轨激励参数,还需要对激励进行在轨标定,得到精确值。总之,在轨激励源的选取、施加、测量和能源消耗的困难是在轨辨识首要解决的工程问题。对实际工程中各种在轨激励源进行的分析比较如表8所示,可为工程应用提供参考。
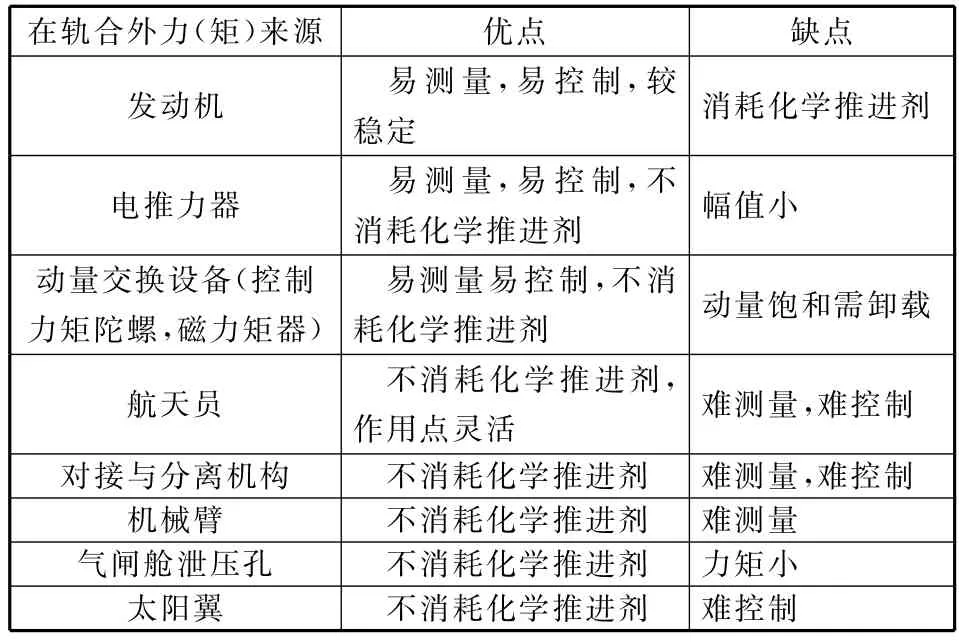
表8 在轨激励分析比较Table 8 Comparison of on-obrit forces
(3)如何在轨高精度测量航天器系统受激励作用后的响应数据是在轨辨识其次需要解决的工程困难,测量数据包含的信息量和精度决定了系统参数的可辨识性和辨识精度。位移响应可以通过传感器测量和摄影测量,速度和加速度响应可以通过陀螺仪、加速度计等敏感器测量,测量响应过程既要考虑选用合适的敏感器精确测量到数据,兼顾工程难度合理布置,又要考虑布置的敏感器等测量设备对系统的影响。由于变结构航天器系统的构型不断发生变化,这就要求测量系统能在不同构型下精确测量响应。并且需要对测量的数据进行采集和处理,从包含干扰的工程数据中提取出有价值的响应数据为辨识所用。
(4)由于大型变结构航天器系统的各舱段研制进度不同步,分多次发射入轨组装,若对大型变结构航天器系统的动力学参数进行在轨辨识试验,需克服研制进度不同步的困难,在各舱段研制初期制定好每舱段相互配合完成在轨辨识试验的系统方案,统筹分析出各舱段布置的激励源、响应测量设备、数据采集和处理系统等必备条件,保障在轨辨识试验能顺利开展。
6 结束语
大型变结构航天器是我国未来航天器发展方向之一,其动力学特性不断发生变化,地面无法进行全尺寸试验,而对其精确控制就需要在轨辨识出其动力学特性参数,修正控制模型。为满足这一迫切需求,国内应积极开展动力学特性在轨辨识方法的应用研究,克服工程应用面临的困难,推动我国大型变结构航天器的发展。
(
)
[1]蔡金狮.飞行器系统辨识[M].北京:中国宇航出版社,1995 Cai Jinshi.System identification for flight vehicles[M].Beijing:China Astronautics Press,1995(in Chinese)
[2]徐文福,何勇,王学谦,等.航天器质量特性参数的在轨辨识方法[J].宇航学报,2010,31(8):1906-1914 Xu Wenfu,He Yong,Wang Xueqian,et al.On orbit identification of mass characteristic parameters for spacecraft[J].Journal of Astronautics,2010,31(8):1906-1914(in Chinese)
[3]Palimaka J,Burlton B V.Estimation of spacecraft mass properties using angular rate gyro data[C]//1992 AIAA/AAS Astrodynamics Conference.Washington D.C.:AIAA,1992:21-26
[4]D A Zavalishin,M Yu.Estimation of dynamic characteristics of the international space station from measurements of micro accelerations[J].Cosmic Research,2009,47(2):173-184
[5]Yu R Banit,M Yu Belyaev.Determination of the inertia tensor of the international space station on the basis of telemetry data[J].Cosmic Research,2005,43(2):131-142
[6]Michael T Carter,Srilivas R Vadali,Parameter identification for the International Space Station using nonlinear momentum management control[R]//Washington D.C.:AIAA,1997
[7]Y Yam,D S Bayard.Autonomous frequency domain identification:theory and experiment[R].Pasadena CA:Jet Propulsion Laboratory,1989
[8]Tobin Anthony.On-orbit modal identification of the Hubble Space Telescope[C]//Proceedings of the American Control Conference.New York:IEEE,1995:402-406
[9]G Michael Papadopoulos,Robert H Tolson.System identification for space station freedom using observer/ Kalman filter Markov parameters,NASA 191521[R].Washington D.C.:NASA,1993
[10]Hyoung M Kim,Mohanmed Kaouk.Mir structural dynamics experiment-first phase test and data analysis[C]//39thAIAA/ASME/AHS Adaptive Structures Eorum.Washington D.C.:AIAA,1998:204-212
[11]Paul Brugarolas,David S Bayard,John T Spanos,et al.System identification of a nonlinear flexible mode for the shuttle radar topography mission,AIAA 2002-4937[R].Washington D.C.:AIAA,2002
[12]Shuichi Adachi.On-orbit system identification experiments on Engineering Test Satellite-Ⅵ[J].Control Engineering Practice,1999,7(7):831-841
[13]Takashi Ohtani,Yoshiro Hamada,Tomoyuki Nagashio.On-orbit experiment plan of robust attitude control of ETS-Ⅷ[C]//SICE Annual Conference.Japan:Kagawa University,2007
(编辑:张小琳)
Discussion on Method of On-orbit Identification of Dynamic Characteristics for Variable Structure Spacecraft
HUANG Longfei1SHANG Zhi2LIU Ning1
(1 Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
(2 China Academy of Space Technology,Beijing 100094,China)
On-orbit identification of dynamic characteristics is the basis of accurate controlling of variable structure spacecraft.In this paper,analysis on foreign practical applications of on-orbit identification of dynamic characteristics is described.Then,applicability of identification algorithms is analyzed and evaluated.Moreover,restrictions on application of on-orbit identification of dynamic characteristics for variable structure spacecraft in China are also analyzed.Einally,identification algorithms are summarized,which are associated with mass properties and modal parameter.The work can provide an engineering approach and reference to further application of on-orbit identification of dynamic characteristics for large variable structure spacecraft in China.
variable structure spacecraft;dynamic characteristics;on-orbit identification
V414
A DOI:10.3969/j.issn.1673-8748.2015.03.016
2015-01-19;
2015-04-27
国家重大科技专项工程
黄龙飞,男,硕士研究生,研究方向为航天器总体设计。Email:hlf-buaa15@163.com。
